Nota
¡Hola! Bienvenido a la Comunidad de Entusiastas de SunFounder para Raspberry Pi, Arduino y ESP32 en Facebook. Sumérgete junto a otros entusiastas en el mundo de Raspberry Pi, Arduino y ESP32.
¿Por qué unirse?
Soporte Experto: Resuelve problemas posventa y desafíos técnicos con la ayuda de nuestra comunidad y equipo.
Aprende y Comparte: Intercambia consejos y tutoriales para mejorar tus habilidades.
Previsualizaciones Exclusivas: Obtén acceso anticipado a anuncios de nuevos productos y adelantos exclusivos.
Descuentos Especiales: Disfruta de descuentos exclusivos en nuestros productos más recientes.
Promociones y Sorteos Festivos: Participa en sorteos y promociones en temporadas festivas.
👉 ¿Listo para explorar y crear con nosotros? Haz clic en [Aquí] y únete hoy.
7.10 Ayuda de Reversa
Este proyecto utiliza un LED, un zumbador y un módulo ultrasónico para crear un sistema de asistencia de reversa. Podemos colocarlo en un coche de control remoto para simular el proceso real de estacionamiento en reversa en un garaje.
Componentes Necesarios
Para este proyecto, necesitamos los siguientes componentes.
Es muy conveniente adquirir un kit completo; aquí tienes el enlace:
Nombre |
ELEMENTOS EN ESTE KIT |
ENLACE |
|---|---|---|
Kit Kepler |
450+ |
También puedes comprarlos por separado en los enlaces a continuación.
SN |
COMPONENTE |
CANTIDAD |
ENLACE |
|---|---|---|---|
1 |
1 |
||
2 |
Cable Micro USB |
1 |
|
3 |
1 |
||
4 |
Varios |
||
5 |
1(S8050) |
||
6 |
2(1KΩ, 220Ω) |
||
7 |
Zumbador Activo Buzzer |
1 |
|
8 |
1 |
||
9 |
1 |
Diagrama
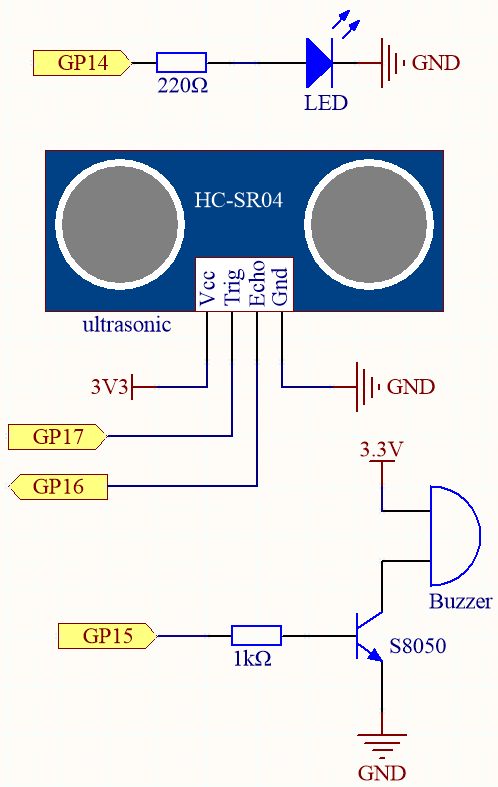
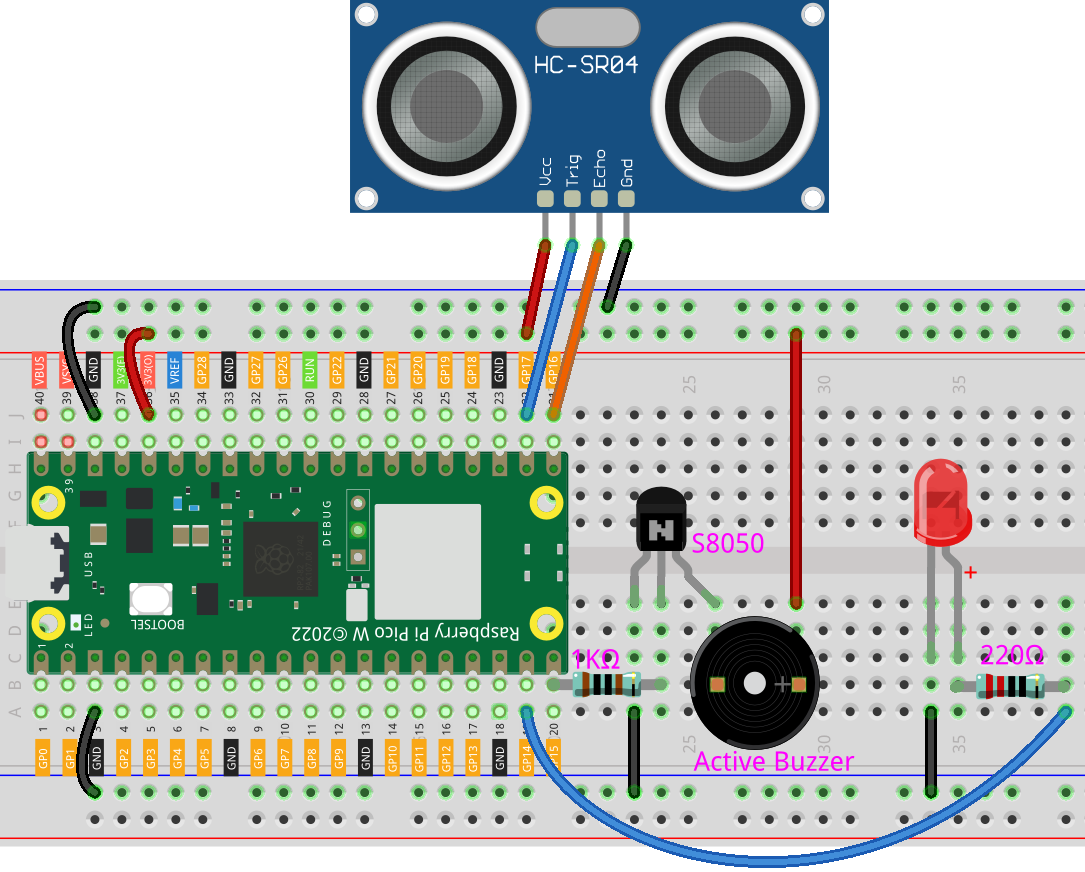
Conexiones
Código
Nota
Abre el archivo
7.10_reversing_aid.pyen la ruta dekepler-kit-main/micropythono copia este código en Thonny, luego haz clic en «Run Current Script» o simplemente presiona F5 para ejecutarlo.No olvides seleccionar el intérprete «MicroPython (Raspberry Pi Pico)» en la esquina inferior derecha.
Para tutoriales detallados, consulta Abrir y ejecutar código directamente.
import machine
import time
# Inicializar los pines para el zumbador y el LED
buzzer = machine.Pin(15, machine.Pin.OUT) # Zumbador en el pin 15
led = machine.Pin(14, machine.Pin.OUT) # LED en el pin 14
# Inicializar los pines para el sensor ultrasónico (HC-SR04)
TRIG = machine.Pin(17, machine.Pin.OUT) # Pin de disparo para el sensor ultrasónico
ECHO = machine.Pin(16, machine.Pin.IN) # Pin de eco para el sensor ultrasónico
dis = 100 # Variable global para almacenar la distancia
# Función para medir la distancia usando el sensor ultrasónico
def distance():
TRIG.low()
time.sleep_us(2)
TRIG.high()
time.sleep_us(10)
TRIG.low()
timeout_start = time.ticks_us() # Usar microsegundos para mayor precisión
# Esperar a que el pin ECHO pase a alto (inicio del pulso de eco)
while not ECHO.value():
if time.ticks_diff(time.ticks_us(), timeout_start) > 30000: # Tiempo de espera de 30ms
return -1 # Tiempo de espera agotado, retornar -1 si no se detecta pulso
time1 = time.ticks_us() # Tiempo de inicio para el cálculo de ancho de pulso
# Esperar a que el pin ECHO pase a bajo (fin del pulso de eco)
while ECHO.value():
if time.ticks_diff(time.ticks_us(), time1) > 30000: # Tiempo de espera de 30ms
return -1 # Tiempo de espera agotado, retornar -1 si el pulso es demasiado largo
time2 = time.ticks_us() # Tiempo de fin para el cálculo de ancho de pulso
# Calcular la distancia basada en la duración del pulso de eco
during = time.ticks_diff(time2, time1)
distance_cm = during * 340 / 2 / 10000 # Convertir tiempo a distancia en cm
return distance_cm
# Función para hacer sonar el zumbador y encender el LED
def beep():
buzzer.value(1) # Encender el zumbador
led.value(1) # Encender el LED
time.sleep(0.1) # Duración del pitido
buzzer.value(0) # Apagar el zumbador
led.value(0) # Apagar el LED
time.sleep(0.1) # Breve pausa entre pitidos
# Inicializar variables para controlar los intervalos de pitido
intervals = 2000 # Intervalo largo inicial por defecto
previousMillis = time.ticks_ms() # Almacenar el tiempo anterior para controlar los intervalos de pitido
# Bucle principal para manejar los intervalos de pitido según la distancia
while True:
dis = distance() # Medir la distancia directamente en el bucle principal
# Ajustar los intervalos de pitido en función de la distancia
if dis > 0: # Asegurarse de que se mida una distancia válida
if dis <= 10:
intervals = 300 # Distancia cercana, pitidos más rápidos
elif dis <= 20:
intervals = 500 # Distancia media-cercana, pitidos moderados
elif dis <= 50:
intervals = 1000 # Distancia media, pitidos más lentos
else:
intervals = 2000 # Distancia lejana, pitidos mucho más lentos
# Imprimir la distancia medida
print(f'Distance: {dis:.2f} cm')
# Verificar si es momento de pitido según el intervalo
currentMillis = time.ticks_ms() # Obtener el tiempo actual
if time.ticks_diff(currentMillis, previousMillis) >= intervals:
beep() # Emitir el pitido y parpadear el LED
previousMillis = currentMillis # Actualizar el tiempo del último pitido
time.sleep_ms(100) # Pequeña pausa para evitar lecturas demasiado frecuentes
Al ejecutar el programa, el sensor ultrasónico leerá continuamente la distancia al obstáculo frente a él, y podrás ver el valor exacto de la distancia en el shell.
El LED y el zumbador cambiarán la frecuencia de parpadeo y pitido según el valor de la distancia, indicando así la cercanía del obstáculo.
En el artículo 6.1 Midiendo Distancia se mencionó que cuando el sensor ultrasónico funciona, el programa se pausa.
Para evitar interferir con el tiempo del LED o el zumbador, hemos creado un hilo separado para la medición de distancia en este ejemplo.