Nota
¡Hola! Bienvenido a la Comunidad de Entusiastas de SunFounder para Raspberry Pi, Arduino y ESP32 en Facebook. Sumérgete junto a otros entusiastas en el mundo de Raspberry Pi, Arduino y ESP32.
¿Por qué unirse?
Soporte Experto: Resuelve problemas posventa y desafíos técnicos con la ayuda de nuestra comunidad y equipo.
Aprende y Comparte: Intercambia consejos y tutoriales para mejorar tus habilidades.
Previsualizaciones Exclusivas: Obtén acceso anticipado a anuncios de nuevos productos y adelantos exclusivos.
Descuentos Especiales: Disfruta de descuentos exclusivos en nuestros productos más recientes.
Promociones y Sorteos Festivos: Participa en sorteos y promociones en temporadas festivas.
👉 ¿Listo para explorar y crear con nosotros? Haz clic en [Aquí] y únete hoy.
7.4 Contador de Pasajeros
Para centros comerciales, cadenas de tiendas, aeropuertos, estaciones, museos y otros espacios públicos como salas de exposición, el flujo de personas es un dato indispensable.
Por ejemplo, en aeropuertos y estaciones, se necesita controlar estrictamente el número de personas para garantizar la seguridad y el flujo fluido. Además, se puede analizar cuándo hay más visitantes en centros comerciales y tiendas, cuántas compras genera cada usuario, entre otros. De este modo, se pueden estudiar los hábitos de consumo y aumentar las ventas.
Los contadores de pasajeros ayudan a comprender el funcionamiento de estos espacios públicos y a organizar sus operaciones de forma eficiente.
Crearemos un contador de pasajeros sencillo utilizando un sensor PIR y una pantalla de 7 segmentos de 4 dígitos.
Componentes Necesarios
Para este proyecto, necesitamos los siguientes componentes.
Es muy conveniente adquirir un kit completo; aquí tienes el enlace:
Nombre |
ELEMENTOS EN ESTE KIT |
ENLACE |
|---|---|---|
Kit Kepler |
450+ |
También puedes comprarlos por separado en los enlaces a continuación.
SN |
COMPONENTE |
CANTIDAD |
ENLACE |
|---|---|---|---|
1 |
1 |
||
2 |
Cable Micro USB |
1 |
|
3 |
1 |
||
4 |
Varios |
||
5 |
4(220Ω) |
||
6 |
1 |
||
7 |
1 |
||
8 |
1 |
Esquema
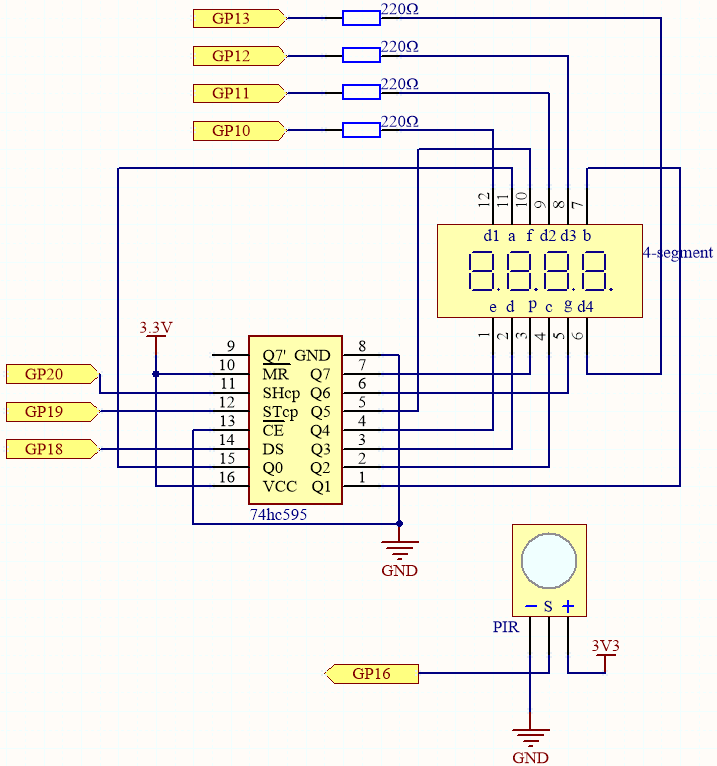
Este circuito se basa en el 5.3 Contador de Tiempo con la adición de un módulo PIR.
El PIR enviará una señal alta de aproximadamente 2.8 segundos cuando alguien pase frente a él.
El módulo PIR tiene dos potenciómetros: uno ajusta la sensibilidad y el otro la distancia de detección. Para mejorar el rendimiento del módulo PIR, ajusta ambos potenciómetros completamente en sentido antihorario.

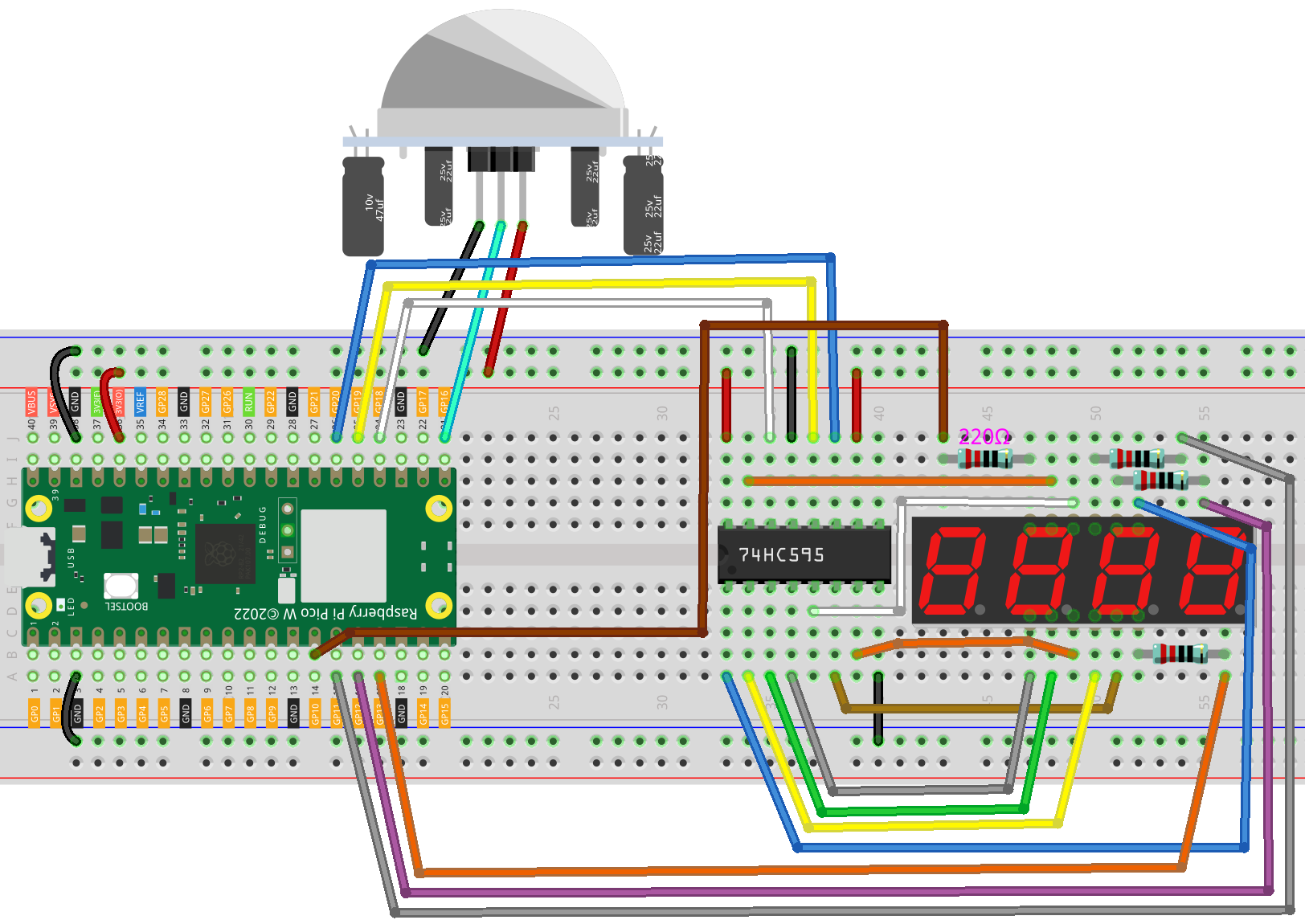
Conexiones
Código
Nota
Abre el archivo
7.4_passenger_counter.pyen la ruta dekepler-kit-main/micropythono copia este código en Thonny, luego haz clic en «Run Current Script» o simplemente presiona F5 para ejecutarlo.No olvides seleccionar el intérprete «MicroPython (Raspberry Pi Pico)» en la esquina inferior derecha.
Para tutoriales detallados, consulta Abrir y ejecutar código directamente.
import machine
import time
# Inicializa el sensor PIR en el pin 16, configurado como entrada
pir_sensor = machine.Pin(16, machine.Pin.IN)
# Códigos de 7 segmentos para los dígitos 0-9, usando hexadecimal para representar los segmentos LED
SEGCODE = [0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f]
# Define los pines para la comunicación con el registro de desplazamiento (74HC595)
sdi = machine.Pin(18, machine.Pin.OUT) # Entrada de datos en serie
rclk = machine.Pin(19, machine.Pin.OUT) # Reloj del registro (Latch)
srclk = machine.Pin(20, machine.Pin.OUT) # Reloj del registro de desplazamiento
# Inicializa la lista para almacenar los pines de control de 4 dígitos
placePin = []
# Define los pines de control para cada uno de los cuatro dígitos (ánodos comunes)
pin = [10,13,12,11] # Números de pines para la pantalla de 4 dígitos
for i in range(4):
placePin.append(None) # Reserva espacio en la lista
placePin[i] = machine.Pin(pin[i], machine.Pin.OUT) # Inicializa el pin como salida
# Inicializa el contador para rastrear eventos de detección de movimiento
count = 0
# Función para seleccionar qué dígito (0-3) mostrar controlando los pines de ánodo común
def pickDigit(digit):
for i in range(4):
placePin[i].value(1) # Apaga todos los dígitos
placePin[digit].value(0) # Enciende el dígito seleccionado
# Función para limpiar la pantalla enviando '0x00' al registro de desplazamiento
def clearDisplay():
hc595_shift(0x00)
# Función para enviar datos al registro de desplazamiento (74HC595)
def hc595_shift(dat):
rclk.low() # Baja el latch para preparar el desplazamiento de datos
time.sleep_us(200) # Pequeña demora para estabilidad de sincronización
for bit in range(7, -1, -1): # Bucle a través de cada bit (MSB primero)
srclk.low() # Prepara el siguiente bit
time.sleep_us(200)
value = 1 & (dat >> bit) # Extrae el bit actual de los datos
sdi.value(value) # Establece el valor de la línea de datos
time.sleep_us(200)
srclk.high() # Pulso en el reloj de desplazamiento para almacenar el bit
time.sleep_us(200)
time.sleep_us(200)
rclk.high() # Pulso en el reloj del registro para mover los datos a la salida
# Manejador de interrupción para el sensor PIR, activado en detección de movimiento (flanco ascendente)
# Incrementa el contador de movimiento cada vez que se detecta el sensor
def motion_detected(pin):
global count
count = count + 1 # Incrementa el conteo al detectar movimiento
# Configura una interrupción para detectar movimiento usando el sensor PIR
pir_sensor.irq(trigger=machine.Pin.IRQ_RISING, handler=motion_detected)
# Bucle principal para actualizar continuamente la pantalla de 7 segmentos con el conteo actual
while True:
# Actualiza el primer dígito (unidades)
pickDigit(0)
hc595_shift(SEGCODE[count % 10])
# Actualiza el segundo dígito (decenas)
pickDigit(1)
hc595_shift(SEGCODE[count % 100 // 10])
# Actualiza el tercer dígito (centenas)
pickDigit(2)
hc595_shift(SEGCODE[count % 1000 // 100])
# Actualiza el cuarto dígito (millares)
pickDigit(3)
hc595_shift(SEGCODE[count % 10000 // 1000])
Cuando se ejecuta el código, el número en la pantalla de 4 dígitos de 7 segmentos aumentará en uno cada vez que alguien pase frente al módulo PIR.