Nota
¡Hola! Bienvenido a la Comunidad de Entusiastas de SunFounder para Raspberry Pi, Arduino y ESP32 en Facebook. Sumérgete junto a otros entusiastas en el mundo de Raspberry Pi, Arduino y ESP32.
¿Por qué unirte?
Soporte Experto: Resuelve problemas postventa y desafíos técnicos con ayuda de nuestra comunidad y equipo.
Aprende y Comparte: Intercambia consejos y tutoriales para mejorar tus habilidades.
Avances Exclusivos: Accede anticipadamente a anuncios de nuevos productos y adelantos exclusivos.
Descuentos Especiales: Disfruta de descuentos exclusivos en nuestros productos más recientes.
Promociones y Sorteos Festivos: Participa en sorteos y promociones especiales.
👉 ¿Listo para explorar y crear con nosotros? Haz clic en [Aquí] y únete hoy mismo.
7.5 JUEGO - 10 Segundos
Para poner a prueba tu concentración, vamos a crear un dispositivo de juego. Haremos una varita mágica conectando un interruptor de inclinación a un palo. Cuando agites la varita, la pantalla de 4 dígitos empezará a contar, y cuando la vuelvas a agitar, se detendrá. Para ganar, el contador debe detenerse en 10.00. Puedes jugar con tus amigos para ver quién es el «mago del tiempo».
Componentes Requeridos
En este proyecto, necesitamos los siguientes componentes.
Es conveniente adquirir un kit completo; aquí tienes el enlace:
Nombre |
ELEMENTOS EN ESTE KIT |
ENLACE |
|---|---|---|
Kit Kepler |
450+ |
También puedes comprarlos por separado en los enlaces a continuación.
N.º |
COMPONENTE |
CANTIDAD |
ENLACE |
|---|---|---|---|
1 |
1 |
||
2 |
Cable Micro USB |
1 |
|
3 |
1 |
||
4 |
Varios |
||
5 |
5 (4 de 220Ω, 1 de 10KΩ) |
||
6 |
1 |
||
7 |
1 |
||
8 |
1 |
Esquema
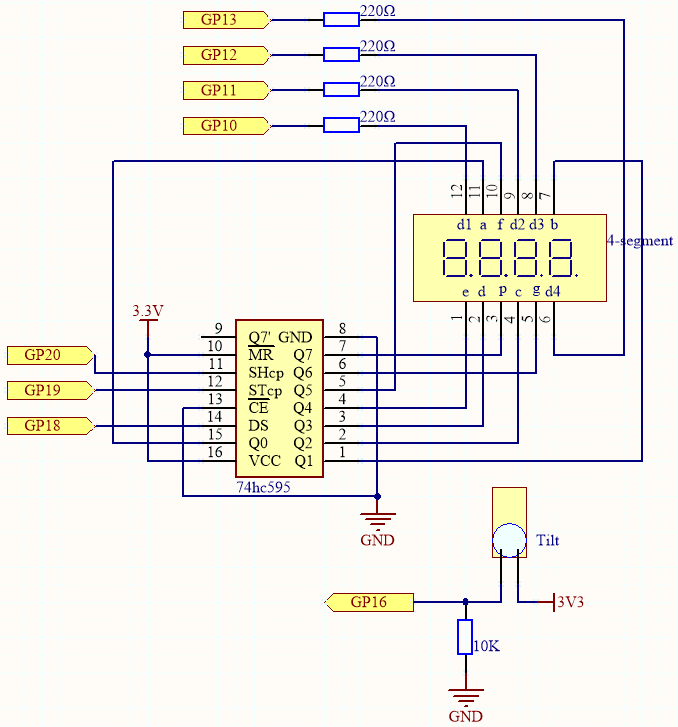
Este circuito se basa en 5.3 Contador de Tiempo con la adición de un interruptor de inclinación.
GP16 es alto cuando el interruptor de inclinación está en posición vertical; bajo cuando está inclinado.
Conexión

Código
Nota
Abre el archivo
7.5_game_10_second.pyen la rutakepler-kit-main/micropythono copia este código en Thonny, luego haz clic en «Run Current Script» o simplemente presiona F5 para ejecutarlo.No olvides seleccionar el intérprete «MicroPython (Raspberry Pi Pico)» en la esquina inferior derecha.
Para tutoriales detallados, consulta Abrir y ejecutar código directamente.
import machine
import time
# Códigos del display de 7 segmentos para los dígitos 0-9, en hexadecimal
SEGCODE = [0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f]
# Definir pines para la comunicación del registro de desplazamiento (74HC595)
sdi = machine.Pin(18, machine.Pin.OUT) # Entrada de Datos Seriales
rclk = machine.Pin(19, machine.Pin.OUT) # Reloj de Registro (Latch)
srclk = machine.Pin(20, machine.Pin.OUT) # Reloj de Registro de Desplazamiento
# Inicializar lista para almacenar los pines de control de los 4 dígitos
placePin = []
# Definir pines de control para cada uno de los cuatro dígitos (ánodos comunes)
pin = [10,13,12,11]
for i in range(4):
placePin.append(None)
placePin[i] = machine.Pin(pin[i], machine.Pin.OUT)
# Función para seleccionar cuál dígito (0-3) mostrar controlando los pines de ánodo común
def pickDigit(digit):
for i in range(4):
placePin[i].value(1)
placePin[digit].value(0)
# Función para limpiar la pantalla enviando '0x00' al registro de desplazamiento
def clearDisplay():
hc595_shift(0x00)
# Función para enviar datos al registro de desplazamiento (74HC595)
def hc595_shift(dat):
rclk.low()
time.sleep_us(200)
for bit in range(7, -1, -1):
srclk.low()
time.sleep_us(200)
value = 1 & (dat >> bit)
sdi.value(value)
time.sleep_us(200)
srclk.high()
time.sleep_us(200)
time.sleep_us(200)
rclk.high()
# Función para mostrar un número en el display de 7 segmentos
def display(num):
pickDigit(0)
hc595_shift(SEGCODE[num % 10])
pickDigit(1)
hc595_shift(SEGCODE[num % 100 // 10])
pickDigit(2)
hc595_shift(SEGCODE[num % 1000 // 100] + 0x80)
pickDigit(3)
hc595_shift(SEGCODE[num % 10000 // 1000])
# Inicializar el sensor de inclinación en el pin 16
tilt_switch = machine.Pin(16, machine.Pin.IN)
# Bandera booleana para controlar si la cuenta debe continuar
count_flag = False
# Manejador de interrupción para el interruptor de inclinación, alterna la bandera de cuenta
def shake(pin):
global timeStart, count_flag
count_flag = not count_flag
if count_flag == True:
timeStart = time.ticks_ms()
# Configurar una interrupción en el interruptor de inclinación para detectar movimiento
tilt_switch.irq(trigger=machine.Pin.IRQ_RISING, handler=shake)
# Inicializar la variable de conteo a cero
count = 0
# Bucle principal para actualizar continuamente la pantalla según el tiempo transcurrido desde que se activó el interruptor de inclinación
while True:
if count_flag == True:
count = int((time.ticks_ms() - timeStart) / 10)
display(count)
La pantalla de 7 segmentos de 4 dígitos comenzará a contar cuando agites la varita y se detendrá al volver a agitarla. Ganas si logras detener el contador en 10.00. El juego continuará con una nueva agitación.