注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[ここ]をクリックして今すぐ参加しましょう!
3.4 手を追う¶
この車をペットと考えてみてください。手を振ると、車はあなたの方へ走ってきます。
必要な部品¶
このプロジェクトには、以下の部品が必要です。
全体のキットを購入すると非常に便利です。リンクは以下の通りです。
名前 |
このキットのアイテム |
リンク |
|---|---|---|
3 in 1 Starter Kit |
380+ |
以下のリンクから個別に購入することも可能です。
コンポーネントの紹介 |
購入リンク |
|---|---|
- |
|
- |
|
回路の作成¶
超音波センサーモジュールは、超音波を使用して物体までの距離を測定する道具です。 2つのプローブがあります。1つは超音波を送るためのもので、もう1つは波を受信して送受信の時間を距離に変換し、デバイスと障害物との距離を検出するためのものです。
以下の図に従って回路を組み立ててください。
超音波モジュール |
R3ボード |
Vcc |
5V |
Trig |
3 |
Echo |
4 |
Gnd |
GND |

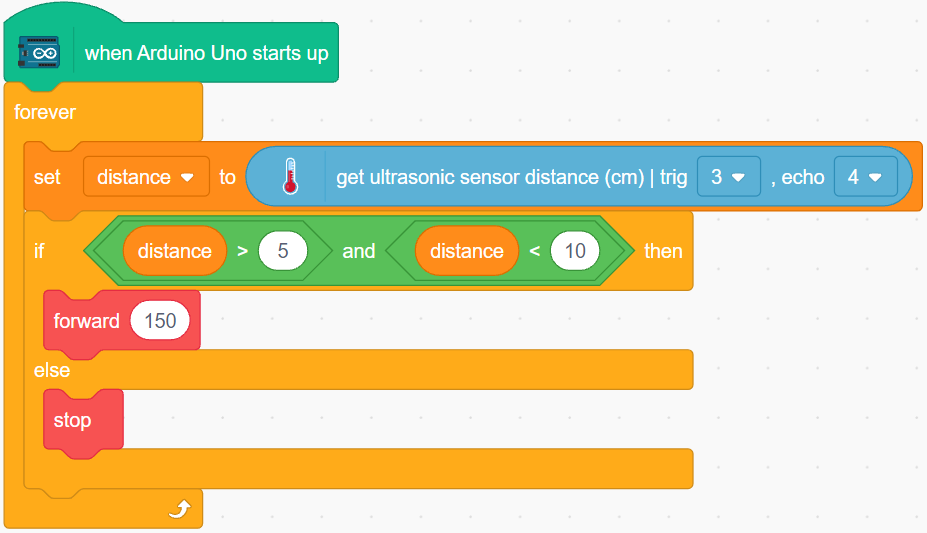
プログラミング¶
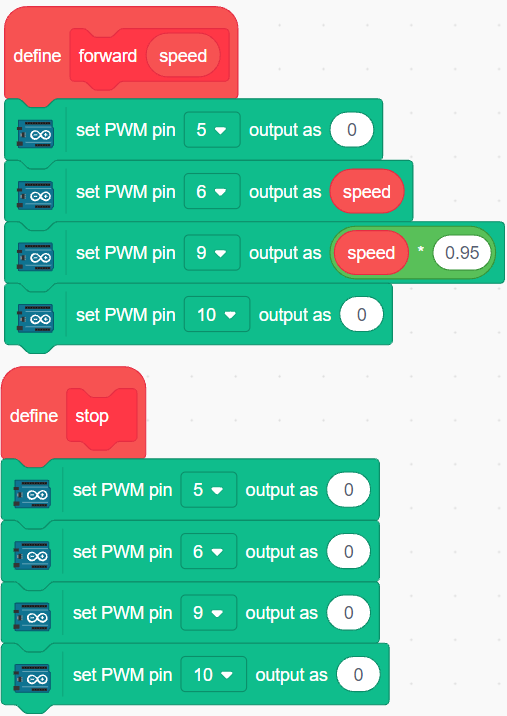
車が前進し停止するブロックを作成します。
車の前に手をかざして、超音波モジュールの値を読み取ります。手の検出距離が5-10cmの場合、車を前進させ、それ以外の場合は停止させます。