注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[ここ]をクリックして今すぐ参加しましょう!
3.2 移動¶
このプロジェクトは、3.1 車をテストする に基づいて、車をすべての方向に移動させるものです。
プログラムを開始する前に、L9110モジュールの動作原理を確認しましょう。
以下はモーターBの真理値表です:
B-1A |
B-1B(B-2A) |
モーターBの状態 |
|---|---|---|
1 |
0 |
時計回りに回転 |
0 |
1 |
反時計回りに回転 |
0 |
0 |
ブレーキ |
1 |
1 |
停止 |
以下はモーターAの真理値表です:
A-1A |
A-1B |
モーターAの状態 |
|---|---|---|
1 |
0 |
時計回りに回転 |
0 |
1 |
反時計回りに回転 |
0 |
0 |
ブレーキ |
1 |
1 |
停止 |
プログラミング¶
次に、車が前進、後退、左右回転、及び停止するためのブロックを作成します。
1. 前進
右モータは時計回り、左モータは反時計回りに回転して車を前進させます。

2. 後退
後退はその逆で、右モータは反時計回り、左モータは時計回りに回転が必要です。

3. 左に曲がる
左右のモータを同時に時計回りに回転させて車を左に曲がらせます。

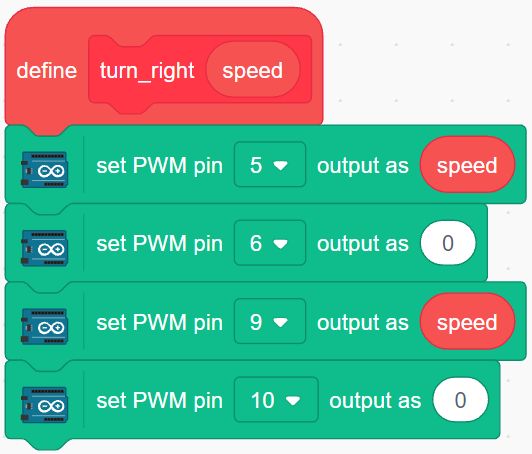
4. 右に曲がる
同様に、左右のモータを反時計回りに回転させて車を右に曲がらせます。
5. 停止
全モータの設定を0にして車を停止させます。

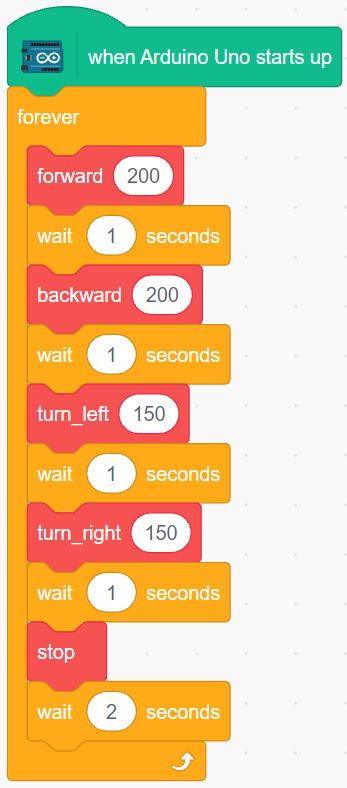
6. 車を動かす
車を前進、後退、左右に1秒間動かしてから停止します。すべてのブロックが[Forever]ブロック内に配置されているので、車が上記の動作を繰り返すのを見ることができます。