注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[ここ]をクリックして今すぐ参加しましょう!
3.1 車をテストする¶
このセクションでは、車を前進させるためのスクリプトの書き方を学びますが、まずは カープロジェクト を参照して車の組み立て方や基本的な理解を得る必要があります。
プロジェクトを開始する前に、アップロードモード で PictoBlox を使用する手順を知っておく必要があります。
必要な部品¶
このプロジェクトでは、以下の部品が必要です。
キットでまとめて購入すると便利です。以下にリンクを掲載しています。
名前 |
このキットのアイテム |
リンク |
|---|---|---|
3 in 1 Starter Kit |
380+ |
以下のリンクから、部品を個別に購入することもできます。
コンポーネントの紹介 |
購入リンク |
|---|---|
- |
|
- |
回路の作成¶
L9110モータードライバーモジュールは、DCおよびステッピングモーターを駆動するための高電力モータードライバーモジュールです。L9110モジュールは、最大4つのDCモーター、または2つのDCモーターの方向および速度制御を制御できます。
以下の図に従って、L9110モジュールとR3ボードの間にワイヤーを接続します。
L9110 Module |
R3 Board |
Motor |
|---|---|---|
A-1B |
5 |
|
A-1A |
6 |
|
B-1B(B-2A) |
9 |
|
B-1A |
10 |
|
OB(B) |
右モーターの黒ワイヤ |
|
OA(B) |
右モーターの赤ワイヤ |
|
OB(A) |
左モーターの黒ワイヤ |
|
OA(A) |
左モーターの赤ワイヤ |

プログラミング¶
1. 車を前進させる
上記の配線に基づいて、ピン5と6は右モーターの回転を制御するために使用され、ピン9と10は左モーターの回転を制御するために使用されます。では、車を前進させるスクリプトを書いてみましょう。
ボードをArduino Unoに選択した後、アップロードモード に切り替え、次の図に従ってスクリプトを書きます。

Upload Code ボタンをクリックして、コードをR3ボードにアップロードします。完了したら、車の両方のモーターが前進します(車を地面に置いている場合、まっすぐ前進しますが、両方のモーターの速度が少し異なるため、車は曲がるかもしれません)。
もし両方のモーターが前進しない場合、次の状況が発生した場合、両方のモーターの配線を再調整する必要があります。
両方のモーターが同時に後方に回転する場合(左モーターは時計回りに回転し、右モーターは反時計回りに回転する)、左モーターと右モーターの配線を同時に交換します。OA(A)とOB(A)を交換し、OA(B)とOB(B)を交換します。
左モーターが後方に回転する場合(時計回りに回転)、左モーターのOA(B)とOB(B)の配線を交換します。
右モーターが後方に回転する場合(反時計回りに回転)、右モーターのOA(A)とOB(A)の配線を交換します。
2. ブロックを作成
スクリプトをよりクリーンで使いやすくするため、前進の動作を制御するすべてのブロックを1つのブロックにまとめ、使用するときはこのブロックを直接呼び出します。
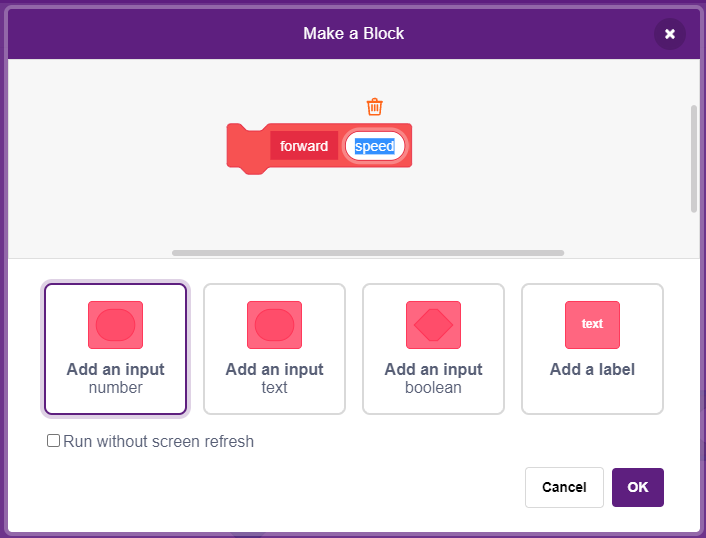
My Blocks パレットの Make a Block をクリックします。

ブロックの名前を forward に設定し、 Add an input にチェックを入れ、入力名を speed に設定します。
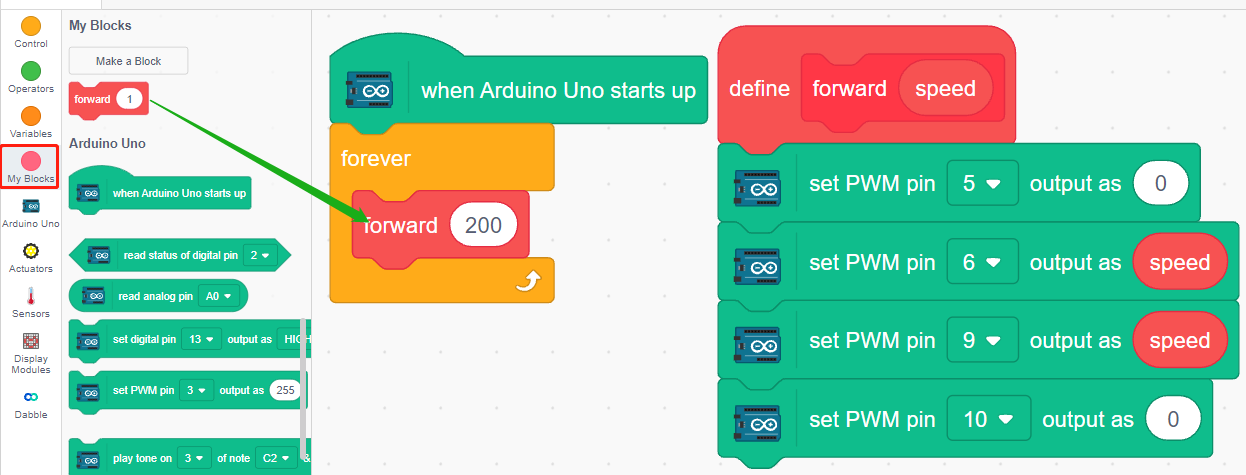
車を前進させるためのブロックを forward にドラッグ&ドロップします。pin6とpin9にパラメーター speed を追加する必要があります。

作成したブロックを [Forward] ブロックの forward で呼び出します。Uploadモードでは、最初に [When Arduino Uno starts up] ブロックを追加する必要があります。
モーターの回転速度の範囲は100~255です。
3. モーターの速度を調整
2つのモーターの速度にわずかな違いがあるため、車がまっすぐ進むことができない場合、車ができるだけまっすぐ進むように、左と右のモーターに異なる速度を設定します。
私の車は右前方にゆっくりと進むので、左のモーターの速度を少し下げます。
