注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[ここ]をクリックして今すぐ参加しましょう!
3.3 黒い線を追う¶
この車にはライン追跡モジュールが搭載されており、車が黒い線を追跡するようにすることができます。
プロジェクトを開始する前に、黒い線テープを使ってカーブマップを作成する必要があります。推奨されるラインの幅は0.8-1.5cmで、曲がり角は90度未満であってはなりません。
必要な部品¶
このプロジェクトでは、以下の部品が必要です。
全体のキットを購入すると非常に便利です。リンクは以下の通りです。
名前 |
このキットのアイテム |
リンク |
|---|---|---|
3 in 1 Starter Kit |
380+ |
以下のリンクから個別に購入することも可能です。
コンポーネントの紹介 |
購入リンク |
|---|---|
- |
|
- |
|
回路の作成¶
これはデジタルライン追跡モジュールで、黒い線を検出すると1を出力し、白い線を検出すると0の値を出力します。さらに、モジュール上のポテンショメータを通じて感知距離を調整することができます。
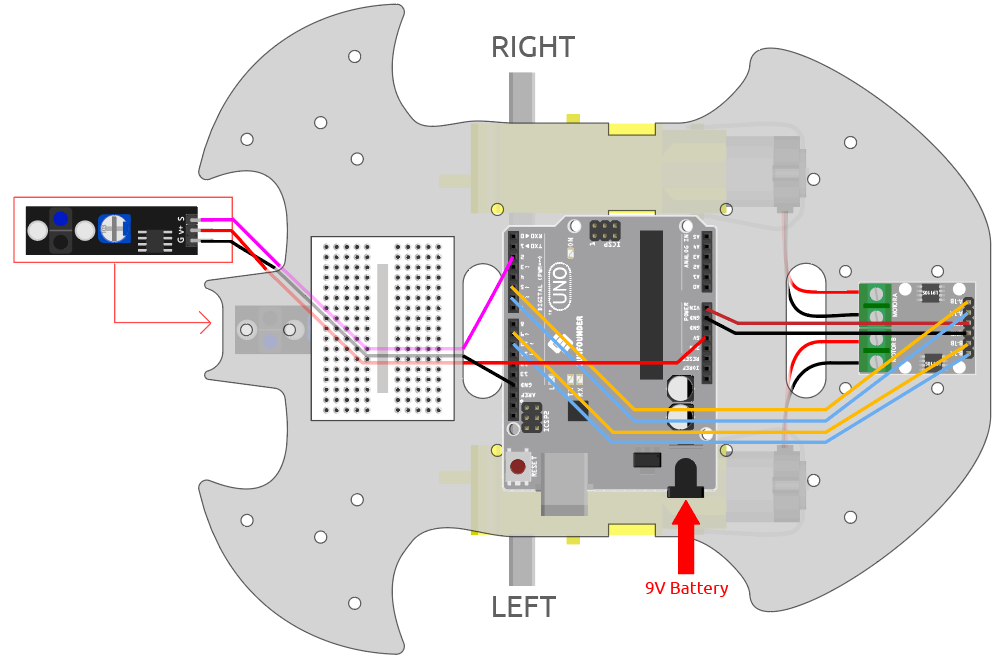
以下の図に従って回路を組み立ててください。
Line Tracking Module |
R3 Board |
S |
2 |
V+ |
5V |
G |
GND |
モジュールの調整¶
プロジェクトを開始する前に、モジュールの感度を調整する必要があります。
上記の図に従って配線し、R3ボードを電源に接続してください(USBケーブルまたは9Vの電池ボタンケーブルで直接接続)。コードをアップロードすることなく電源を入れます。
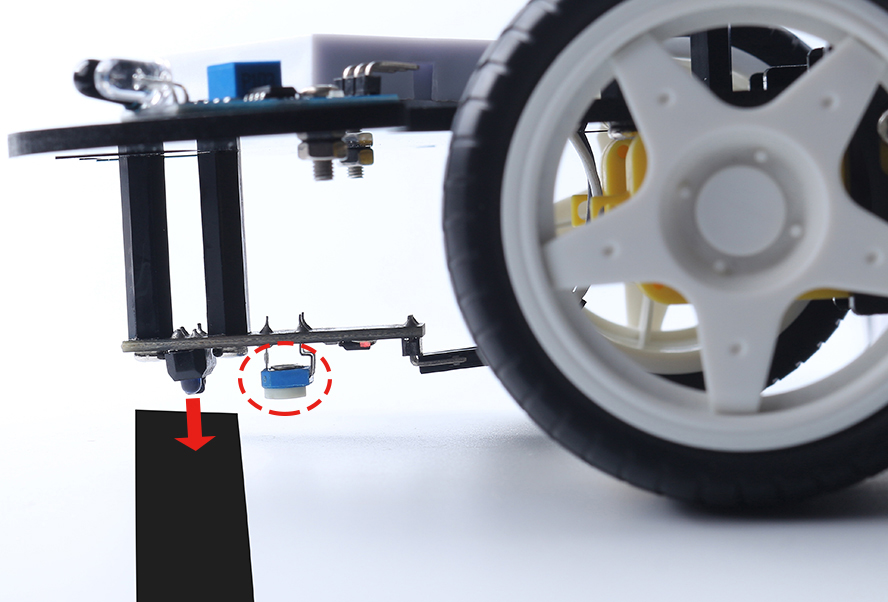
テーブルに黒い電気テープを貼り、カートをその上に置きます。
モジュールのシグナルLEDを観察して、白いテーブル上で点灯し、黒いテープ上で消灯することを確認してください。
そうでない場合は、モジュール上のポテンショメータを調整して、上記の効果が得られるようにします。
プログラミング¶
左前または右前に車を動かす2つのブロックを作成します。
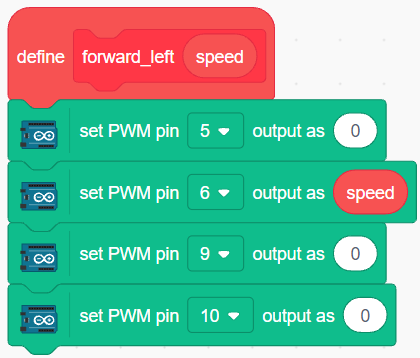
1. 左前方に移動
右のモーターが時計回りに回転し、左のモーターが動かないと、車は左前方にわずかに移動します。
2. 右前方への移動
同様に、左モータが反時計回りに回転し、左モータが動かないと、車は右方向にわずかに移動します。
3. ライン追跡
ライン追跡モジュールの値を読み取り、1の場合は黒い線が検出されたことを意味するので、車を左に進めます。そうでなければ、右方向に進みます。

R3ボードにコードをアップロードした後、ライン追跡モジュールを車の下の黒い線と一致させると、車が線を追跡するのを見ることができます。