Nota
Ciao, benvenuto nella SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Community su Facebook! Approfondisci le tue conoscenze su Raspberry Pi, Arduino ed ESP32 insieme ad altri appassionati.
Perché unirti?
Supporto esperto: Risolvi problemi post-vendita e sfide tecniche con l’aiuto della nostra community e del nostro team.
Impara e condividi: Scambia consigli e tutorial per migliorare le tue competenze.
Anteprime esclusive: Ottieni accesso anticipato agli annunci di nuovi prodotti e anteprime.
Sconti speciali: Approfitta di sconti esclusivi sui nostri prodotti più recenti.
Promozioni festive e omaggi: Partecipa a omaggi e promozioni festive.
👉 Sei pronto a esplorare e creare con noi? Clicca su [Qui] e unisciti oggi!
5.5 Utilizzare la Libreria Interna¶
Nell’IDE di Arduino, puoi utilizzare molte librerie integrate aggiungendo direttamente il file corrispondente .h al tuo codice.
Questo progetto utilizza la libreria Servo per guidare il servo e farlo ruotare tra 0° e 180°.
Componenti necessari
In questo progetto, abbiamo bisogno dei seguenti componenti.
È sicuramente conveniente acquistare un kit completo, ecco il link:
Nome |
ELEMENTI IN QUESTO KIT |
LINK |
|---|---|---|
3 in 1 Starter Kit |
380+ |
Puoi anche acquistarli separatamente dai link sottostanti.
INTRODUZIONE AI COMPONENTI |
LINK PER L’ACQUISTO |
|---|---|
Schema
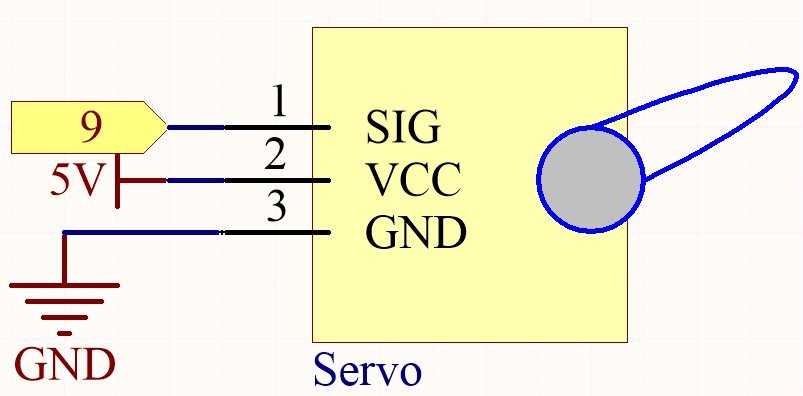
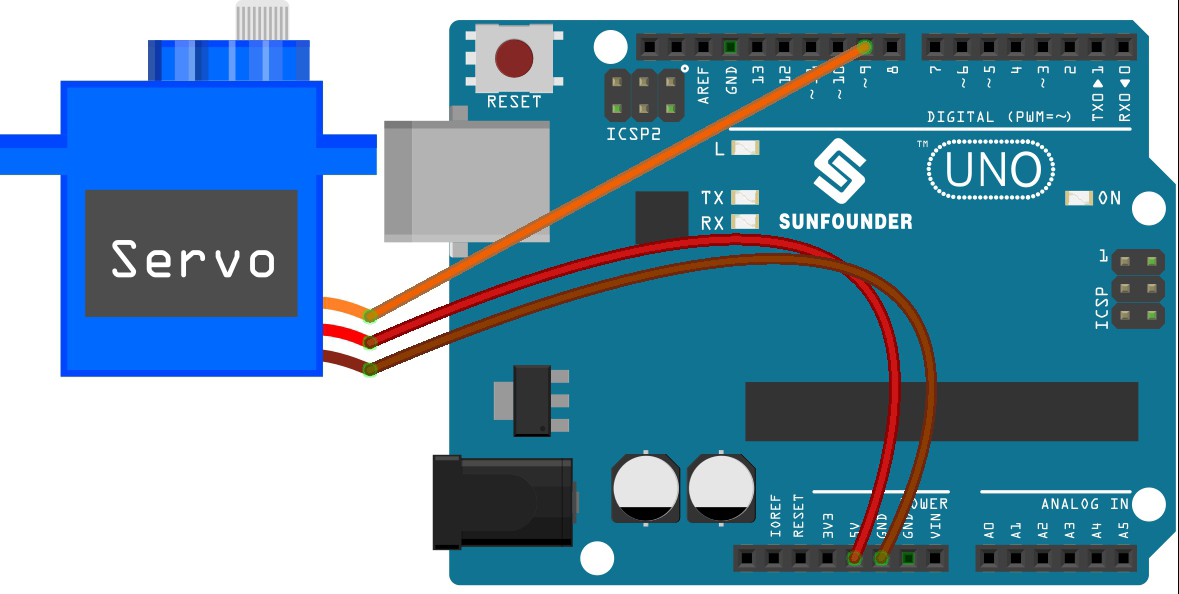
In questo progetto, utilizziamo il pin PWM 9 per controllare il servo. Colleghiamo il filo arancione del servo al pin PWM 9, quello rosso a 5V e quello marrone a GND.
Collegamenti
Codice
Nota
Apri il file
5.5.use_internal_library.inonel percorso3in1-kit\basic_project\5.5.use_internal_library.Oppure copia questo codice nell”Arduino IDE.
Oppure carica il codice tramite il Arduino Web Editor.
Una volta completato il caricamento del codice sulla scheda R3, vedrai il braccio del servo ruotare nell’intervallo 0°~180°.
Come funziona?
Chiamando la libreria Servo.h, puoi controllare facilmente il servo.
#include <Servo.h>
Funzioni della Libreria:
Servo
Crea l’oggetto Servo per controllare un servo.
uint8_t attach(int pin);
Chiama pinMode() per impostare un pin come driver per il servo e restituisce 0 in caso di fallimento.
void detach();
Rilascia un pin dal controllo del servo.
void write(int value);
Imposta l’angolo del servo in gradi, da 0 a 180.
int read();
Restituisce il valore impostato con l’ultimo write().
bool attached();
Restituisce 1 se il servo è attualmente collegato.