Note
Bonjour et bienvenue dans la Communauté Facebook des passionnés de Raspberry Pi, Arduino et ESP32 de SunFounder ! Plongez plus profondément dans l’univers des Raspberry Pi, Arduino et ESP32 avec d’autres passionnés.
Pourquoi rejoindre ?
Support d’experts : Résolvez les problèmes après-vente et les défis techniques avec l’aide de notre communauté et de notre équipe.
Apprendre et partager : Échangez des astuces et des tutoriels pour améliorer vos compétences.
Aperçus exclusifs : Accédez en avant-première aux annonces de nouveaux produits et aux aperçus.
Réductions spéciales : Profitez de réductions exclusives sur nos produits les plus récents.
Promotions festives et cadeaux : Participez à des cadeaux et des promotions de vacances.
👉 Prêt à explorer et à créer avec nous ? Cliquez [Ici] et rejoignez-nous aujourd’hui !
4.1.5 Bienvenue
Introduction
Dans ce projet, nous utiliserons un capteur PIR pour détecter le mouvement des piétons et utiliserons des servos, une LED et un buzzer pour simuler le fonctionnement de la porte automatique d’un magasin de proximité. Lorsque le piéton apparaît dans la zone de détection du PIR, la lumière indicatrice s’allume, la porte s’ouvre et le buzzer joue une sonnerie d’ouverture.
Composants nécessaires
Pour ce projet, nous avons besoin des composants suivants.
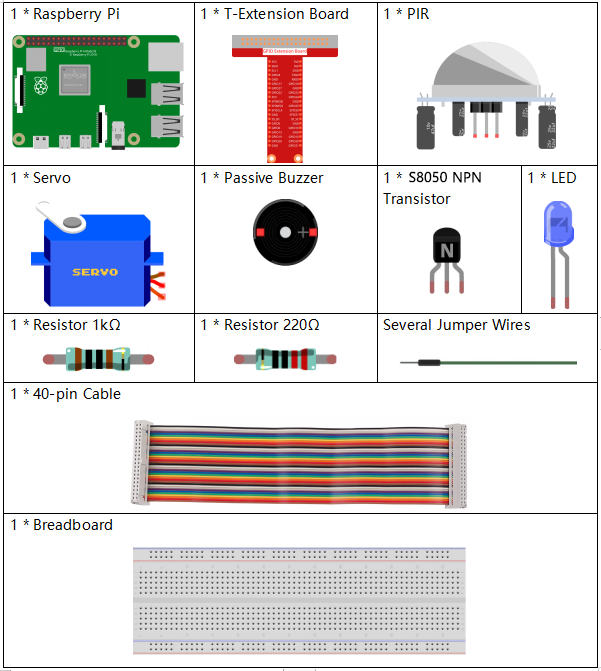
Il est certainement pratique d’acheter un kit complet, voici le lien :
Nom |
ÉLÉMENTS DANS CE KIT |
LIEN |
|---|---|---|
Kit Raphael |
337 |
Vous pouvez également les acheter séparément via les liens ci-dessous.
INTRODUCTION AUX COMPOSANTS |
LIEN D’ACHAT |
|---|---|
- |
|
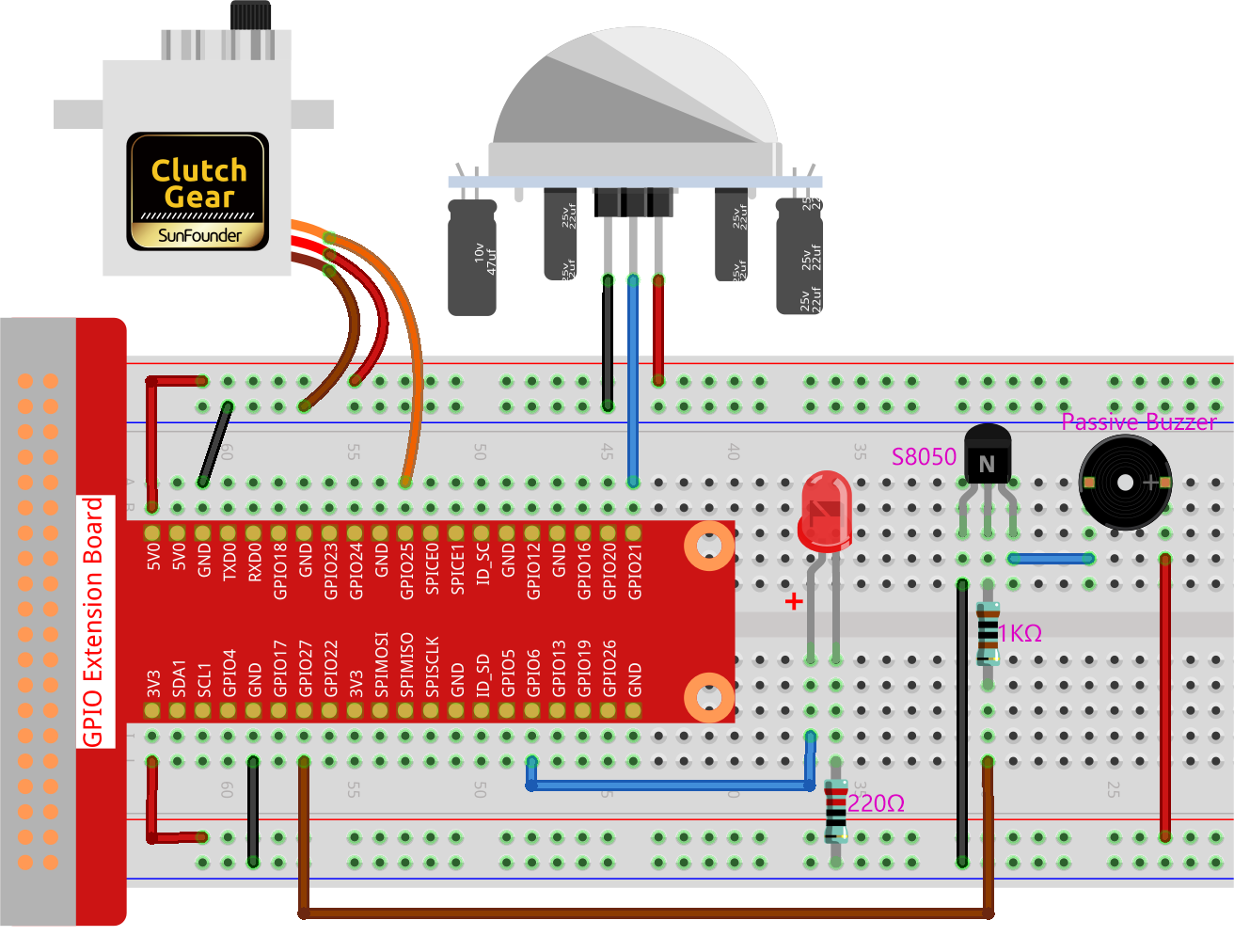
Schéma
Nom T-Board |
Physique |
wiringPi |
BCM |
GPIO18 |
Pin 12 |
1 |
18 |
GPIO17 |
Pin 11 |
0 |
17 |
GPIO27 |
Pin 13 |
2 |
27 |
GPIO22 |
Pin 15 |
3 |
22 |

Procédures Expérimentales
Étape 1 : Construire le circuit.
Étape 2 : Changer de répertoire.
cd ~/raphael-kit/python-pi5
Étape 3 : Exécuter.
sudo python3 4.1.8_Welcome_zero.py
Après l’exécution du code, si le capteur PIR détecte le passage de quelqu’un, la porte s’ouvrira automatiquement (simulée par le servo), allumera l’indicateur et jouera la musique de la sonnette. Après que la musique de la sonnette soit jouée, le système fermera automatiquement la porte et éteindra la lumière indicatrice, en attendant que quelqu’un passe à nouveau.
Il y a deux potentiomètres sur le module PIR : l’un pour ajuster la sensibilité et l’autre pour régler la distance de détection. Pour que le module PIR fonctionne mieux, vous devez les tourner tous les deux à fond dans le sens antihoraire.

Avertissement
Si vous recevez le message d’erreur RuntimeError: Cannot determine SOC peripheral base address, veuillez consulter Si « gpiozero » ne fonctionne pas.
Code
Note
Vous pouvez Modifier/Réinitialiser/Copier/Exécuter/Arrêter le code ci-dessous. Mais avant cela, vous devez accéder au chemin du code source comme raphael-kit/python-pi5. Après avoir modifié le code, vous pouvez l’exécuter directement pour voir l’effet.
#!/usr/bin/env python3
from gpiozero import LED, MotionSensor, Servo, TonalBuzzer
import time
# GPIO pin setup for LED, motion sensor (PIR), and buzzer
ledPin = LED(6)
pirPin = MotionSensor(21)
buzPin = TonalBuzzer(27)
# Servo motor pulse width correction factor and calculation
myCorrection = 0.45
maxPW = (2.0 + myCorrection) / 1000 # Maximum pulse width
minPW = (1.0 - myCorrection) / 1000 # Minimum pulse width
# Initialize servo with custom pulse widths
servoPin = Servo(25, min_pulse_width=minPW, max_pulse_width=maxPW)
# Musical tune for buzzer, with notes and durations
tune = [('C#4', 0.2), ('D4', 0.2), (None, 0.2),
('Eb4', 0.2), ('E4', 0.2), (None, 0.6),
('F#4', 0.2), ('G4', 0.2), (None, 0.6),
('Eb4', 0.2), ('E4', 0.2), (None, 0.2),
('F#4', 0.2), ('G4', 0.2), (None, 0.2),
('C4', 0.2), ('B4', 0.2), (None, 0.2),
('F#4', 0.2), ('G4', 0.2), (None, 0.2),
('B4', 0.2), ('Bb4', 0.5), (None, 0.6),
('A4', 0.2), ('G4', 0.2), ('E4', 0.2),
('D4', 0.2), ('E4', 0.2)]
def setAngle(angle):
"""
Move the servo to a specified angle.
:param angle: Angle in degrees (0-180).
"""
value = float(angle / 180) # Convert angle to servo value
servoPin.value = value # Set servo position
time.sleep(0.001) # Short delay for servo movement
def doorbell():
"""
Play a musical tune using the buzzer.
"""
for note, duration in tune:
buzPin.play(note) # Play the note
time.sleep(float(duration)) # Duration of the note
buzPin.stop() # Stop buzzer after playing the tune
def closedoor():
# Turn off LED and move servo to close door
ledPin.off()
for i in range(180, -1, -1):
setAngle(i) # Move servo from 180 to 0 degrees
time.sleep(0.001) # Short delay for smooth movement
time.sleep(1) # Wait after closing door
def opendoor():
# Turn on LED, open door (move servo), play tune, close door
ledPin.on()
for i in range(0, 181):
setAngle(i) # Move servo from 0 to 180 degrees
time.sleep(0.001) # Short delay for smooth movement
time.sleep(1) # Wait before playing the tune
doorbell() # Play the doorbell tune
closedoor() # Close the door after the tune
def loop():
# Main loop to check for motion and operate door
while True:
if pirPin.motion_detected:
opendoor() # Open door if motion detected
time.sleep(0.1) # Short delay in loop
try:
loop()
except KeyboardInterrupt:
# Clean up GPIO on user interrupt (e.g., Ctrl+C)
buzPin.stop()
ledPin.off()
Explication du Code
Le script commence par importer les modules nécessaires. La bibliothèque
gpiozeroest utilisée pour interfacer avec la LED, le capteur de mouvement, le moteur servo et le buzzer tonal. Le moduletimeest utilisé pour gérer les fonctions liées au temps.#!/usr/bin/env python3 from gpiozero import LED, MotionSensor, Servo, TonalBuzzer import time
Initialise la LED, le capteur de mouvement PIR et le buzzer tonal sur leurs broches GPIO respectives.
# GPIO pin setup for LED, motion sensor (PIR), and buzzer ledPin = LED(6) pirPin = MotionSensor(21) buzPin = TonalBuzzer(27)
Calcule les largeurs d’impulsion maximales et minimales pour le moteur servo, en incorporant un facteur de correction pour un réglage fin.
# Servo motor pulse width correction factor and calculation myCorrection = 0.45 maxPW = (2.0 + myCorrection) / 1000 # Maximum pulse width minPW = (1.0 - myCorrection) / 1000 # Minimum pulse width
Initialise le moteur servo sur la broche GPIO 25 avec les largeurs d’impulsion personnalisées pour un positionnement précis.
# Initialize servo with custom pulse widths servoPin = Servo(25, min_pulse_width=minPW, max_pulse_width=maxPW)
La mélodie est définie comme une séquence de notes (fréquence) et de durées (secondes).
# Musical tune for buzzer, with notes and durations tune = [('C#4', 0.2), ('D4', 0.2), (None, 0.2), ('Eb4', 0.2), ('E4', 0.2), (None, 0.6), ('F#4', 0.2), ('G4', 0.2), (None, 0.6), ('Eb4', 0.2), ('E4', 0.2), (None, 0.2), ('F#4', 0.2), ('G4', 0.2), (None, 0.2), ('C4', 0.2), ('B4', 0.2), (None, 0.2), ('F#4', 0.2), ('G4', 0.2), (None, 0.2), ('B4', 0.2), ('Bb4', 0.5), (None, 0.6), ('A4', 0.2), ('G4', 0.2), ('E4', 0.2), ('D4', 0.2), ('E4', 0.2)]
Fonction pour déplacer le servo à un angle spécifié. Convertit l’angle en une valeur comprise entre 0 et 1 pour le servo.
def setAngle(angle): """ Déplacer le servo à un angle spécifié. :param angle: Angle en degrés (0-180). """ value = float(angle / 180) # Convert angle to servo value servoPin.value = value # Set servo position time.sleep(0.001) # Short delay for servo movement
Fonction pour jouer une mélodie musicale avec le buzzer. Parcourt la liste
tune, en jouant chaque note pour sa durée spécifiée.def doorbell(): """ Play a musical tune using the buzzer. """ for note, duration in tune: buzPin.play(note) # Play the note time.sleep(float(duration)) # Duration of the note buzPin.stop() # Stop buzzer after playing the tune
Fonctions pour ouvrir et fermer la porte à l’aide du moteur servo. La fonction
opendoorallume la LED, ouvre la porte, joue la mélodie, puis ferme la porte.def closedoor(): # Turn off LED and move servo to close door ledPin.off() for i in range(180, -1, -1): setAngle(i) # Move servo from 180 to 0 degrees time.sleep(0.001) # Short delay for smooth movement time.sleep(1) # Wait after closing door def opendoor(): # Turn on LED, open door (move servo), play tune, close door ledPin.on() for i in range(0, 181): setAngle(i) # Move servo from 0 to 180 degrees time.sleep(0.001) # Short delay for smooth movement time.sleep(1) # Wait before playing the tune doorbell() # Play the doorbell tune closedoor() # Close the door after the tune
Boucle principale qui vérifie constamment la détection de mouvement. Lorsqu’un mouvement est détecté, elle déclenche la fonction
opendoor.def loop(): # Main loop to check for motion and operate door while True: if pirPin.motion_detected: opendoor() # Open door if motion detected time.sleep(0.1) # Short delay in loop
Exécute la boucle principale et s’assure que le script peut être arrêté avec une commande clavier (Ctrl+C), en éteignant le buzzer et la LED pour une sortie propre.
try: loop() except KeyboardInterrupt: # Clean up GPIO on user interrupt (e.g., Ctrl+C) buzPin.stop() ledPin.off()