Nota
¡Hola! Bienvenido a la Comunidad de Entusiastas de SunFounder para Raspberry Pi, Arduino y ESP32 en Facebook. Sumérgete en el mundo de Raspberry Pi, Arduino y ESP32 junto a otros entusiastas.
¿Por qué unirse?
Soporte de expertos: Resuelve problemas postventa y desafíos técnicos con la ayuda de nuestra comunidad y equipo.
Aprende y comparte: Intercambia consejos y tutoriales para mejorar tus habilidades.
Preestrenos exclusivos: Obtén acceso anticipado a anuncios de nuevos productos y adelantos.
Descuentos especiales: Disfruta de descuentos exclusivos en nuestros productos más recientes.
Promociones y sorteos festivos: Participa en sorteos y promociones de temporada.
👉 ¿Listo para explorar y crear con nosotros? Haz clic en [Aquí] y únete hoy mismo.
2.11 Sistema de Reversa
En este proyecto usamos un módulo ultrasónico y un zumbador activo para crear un sistema de alarma de reversa. El módulo ultrasónico detecta la distancia y el zumbador emite sonidos de alerta a diferentes frecuencias dependiendo de la distancia.
Componentes Necesarios
Para este proyecto, necesitamos los siguientes componentes.
Es muy conveniente adquirir un kit completo; aquí tienes el enlace:
Nombre |
COMPONENTES EN ESTE KIT |
ENLACE |
|---|---|---|
Kit Kepler |
450+ |
También puedes comprarlos por separado en los enlaces a continuación.
SN |
COMPONENT |
QUANTITY |
LINK |
|---|---|---|---|
1 |
1 |
||
2 |
Micro USB Cable |
1 |
|
3 |
1 |
||
4 |
Several |
||
5 |
1(S8050) |
||
6 |
1(1KΩ) |
||
7 |
Active Buzzer |
1 |
|
8 |
1 |
Conexión

Los pines Echo y Trig del módulo ultrasónico están conectados simultáneamente al GP15, de modo que el módulo envía y recibe señales desde GP15.
El pin medio del transistor conectado al zumbador se conecta a GP14 a través de una resistencia de 1kΩ.
Código
Nota
Puedes referirte a la imagen a continuación para escribir el código arrastrando y soltando.
Importa
2.11_reversing_system.pngdesde la rutakepler-kit-main\piper. Para obtener tutoriales detallados, consulta Importar el Código.

Después de conectar el Pico W, haz clic en el botón Start y el código comenzará a ejecutarse.
Cuando la distancia de detección ultrasónica es menor a 5 cm, el zumbador emite un sonido agudo (0.1s).
Cuando la distancia de detección está entre 5 y 10 cm, el zumbador emite un sonido más lento (0.5s).
Cuando la distancia de detección es mayor a 10 cm, hay una señal sonora cada 1 segundo.
¿Cómo funciona?
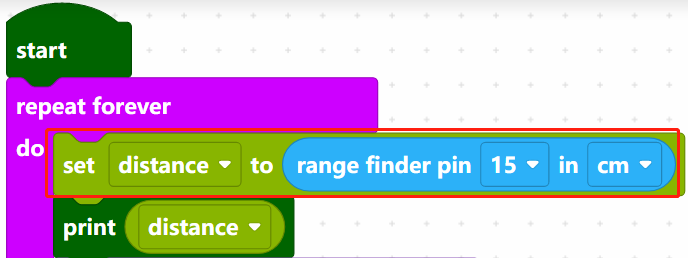
Lee la distancia (en cm) detectada por el ultrasonido y guárdala en la variable [distance].
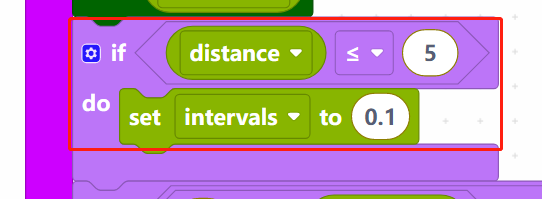
Cuando la distancia es menor o igual a 5, establece el intervalo de la variable [intervals] en 0.1s. La variable [intervals] es el intervalo entre los sonidos del zumbador.
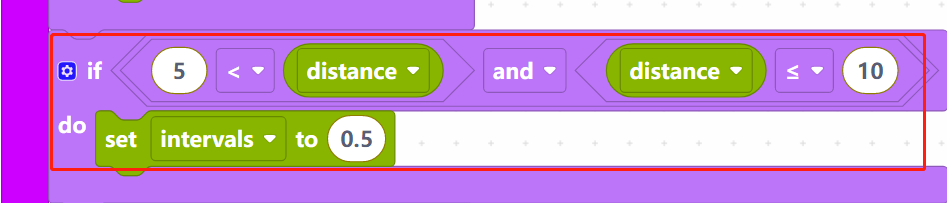
Cuando la distancia es mayor a 5 y menor o igual a 10, ajusta [intervals] a 0.5s.
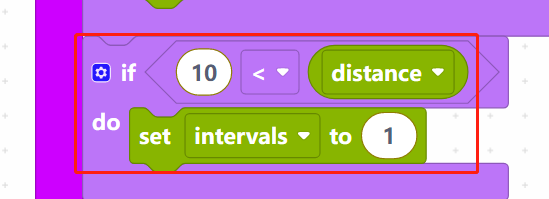
Cuando la distancia es mayor a 10, establece el tiempo de [intervals] en 1s.
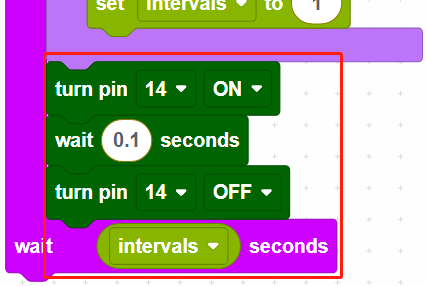
Finalmente, haz que el zumbador emita un sonido cada [intervals] segundos.