Nota
¡Hola! Bienvenido a la Comunidad de Entusiastas de SunFounder para Raspberry Pi, Arduino y ESP32 en Facebook. Sumérgete en el mundo de Raspberry Pi, Arduino y ESP32 junto a otros entusiastas.
¿Por qué unirse?
Soporte de expertos: Resuelve problemas postventa y desafíos técnicos con la ayuda de nuestra comunidad y equipo.
Aprende y comparte: Intercambia consejos y tutoriales para mejorar tus habilidades.
Preestrenos exclusivos: Obtén acceso anticipado a anuncios de nuevos productos y adelantos.
Descuentos especiales: Disfruta de descuentos exclusivos en nuestros productos más recientes.
Promociones y sorteos festivos: Participa en sorteos y promociones de temporada.
👉 ¿Listo para explorar y crear con nosotros? Haz clic en [Aquí] y únete hoy mismo.
2.9 Gato de la Suerte
En este proyecto, usamos un módulo PIR y un servo para crear un «Gato de la Suerte». El módulo PIR se utiliza para detectar visitantes, mientras que el servo imita el movimiento de saludo característico de este gato.
Componentes Necesarios
Para este proyecto, necesitamos los siguientes componentes.
Es muy conveniente adquirir un kit completo; aquí tienes el enlace:
Nombre |
COMPONENTES EN ESTE KIT |
ENLACE |
|---|---|---|
Kit Kepler |
450+ |
También puedes comprarlos por separado en los enlaces a continuación.
SN |
COMPONENTE |
CANTIDAD |
ENLACE |
|---|---|---|---|
1 |
1 |
||
2 |
Cable Micro USB |
1 |
|
3 |
1 |
||
4 |
Varios |
||
5 |
1 |
||
6 |
1 |
Conexión

El cable naranja (señal) del servo está conectado a GP15, el cable rojo (alimentación) está conectado a VBUS y el cable marrón (tierra) está conectado a GND.
El pin central del módulo PIR está conectado al GP3.
Código
Nota
Puedes referirte a la imagen a continuación para escribir el código arrastrando y soltando.
Importa
2.9_lucky_cat.pngdesde la rutakepler-kit-main\piper. Para obtener tutoriales detallados, consulta Importar el Código.

Después de conectar el Pico W, haz clic en el botón Start y el código comenzará a ejecutarse.
Cuando el módulo PIR detecta la llegada de un visitante, el servo oscila de un lado a otro cinco veces y luego se detiene.
¿Cómo Funciona?
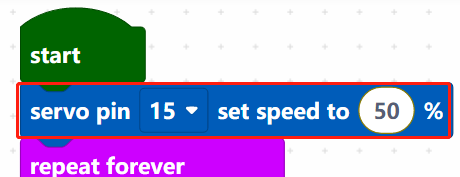
Configura la velocidad de rotación del pin15 (servo) al 15%.
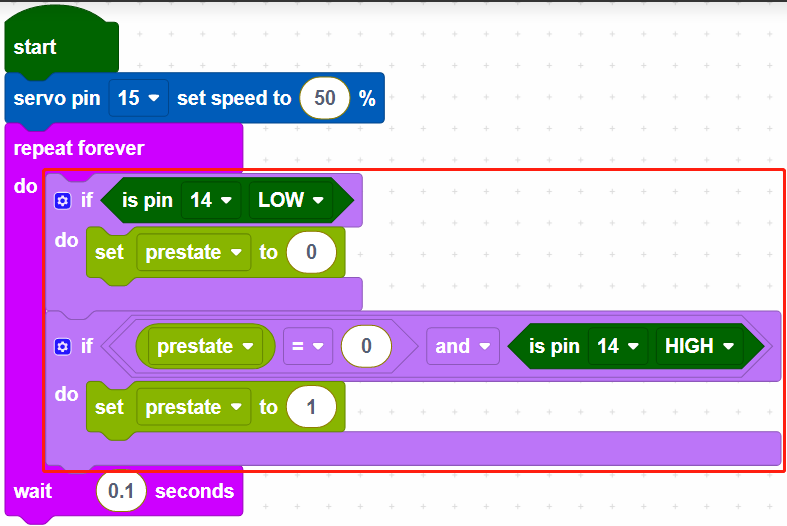
Si GP14 está en bajo, establece la variable [prestate] en 0. Cuando la variable [prestate] es 0 y GP14 cambia a alto (humano detectado), establece la variable [prestate] en 1.
Esto permite que el código principal solo funcione cuando GP14 cambia de bajo a alto, respondiendo una sola vez aunque el módulo PIR siga detectando personas.
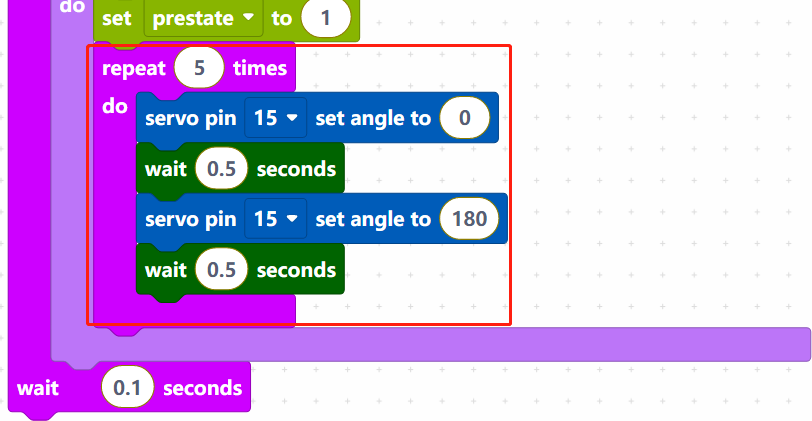
Haz que el servo gire cinco veces en un ciclo de 0 a 180 grados.
[repeat () times do]: Repite el código dentro del bloque do un número finito de veces.