注釈
SunFounderのRaspberry Pi & Arduino & ESP32愛好家Facebookコミュニティへようこそ!仲間の愛好家と一緒に、Raspberry Pi、Arduino、ESP32をより深く探求しましょう。
参加する理由
エキスパートサポート:コミュニティとチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学びと共有:スキルを向上させるためのヒントやチュートリアルを交換しましょう。
限定プレビュー:新製品の発表や先行公開にいち早くアクセスできます。
特別割引:最新製品を特別割引価格でご購入いただけます。
お祭りキャンペーンとプレゼント:プレゼント企画やホリデープロモーションに参加しましょう。
👉 一緒に探求し創造する準備はできましたか? [here] をクリックして今すぐ参加しましょう!
レッスン13:マーズローバーの完全制御
すべてのピースをマスターしました。それでは、それらを組み合わせましょう!学んだすべてを統合して、ライブカメラビュー、移動制御、カメラチルトを備えた完全機能のマーズローバーを作成します。
3つの素晴らしいシステムを統合します:
ローバーのカメラシステムを探る:ライブビデオでローバーの目を通して見る
GalaxyRVRの信号灯を実際に使ってみよう:カラフルな信号灯で走行する
タッチコントロールでカメラ角度を調整:カメラコントロールで上下を見る
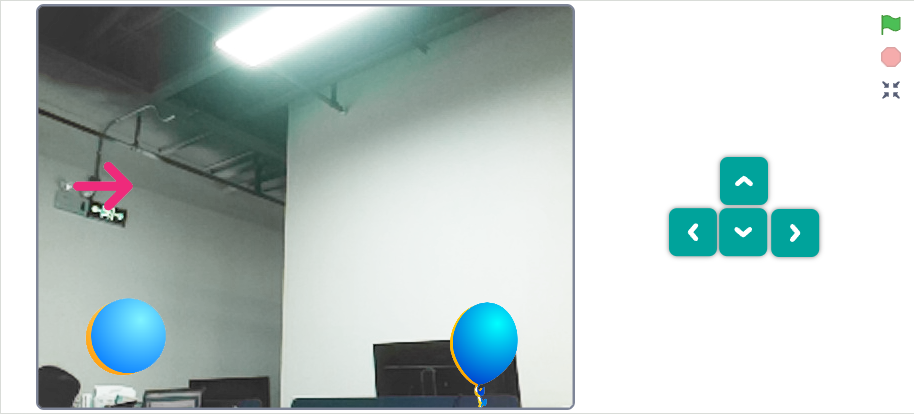
結果は?GalaxyRVRの完全制御!カメラコントロール用のボタンをクリックし、矢印キーで運転します。
カメラシステム
前のレッスンと同じカメラ設定を繰り返します:ローバーのカメラシステムを探る
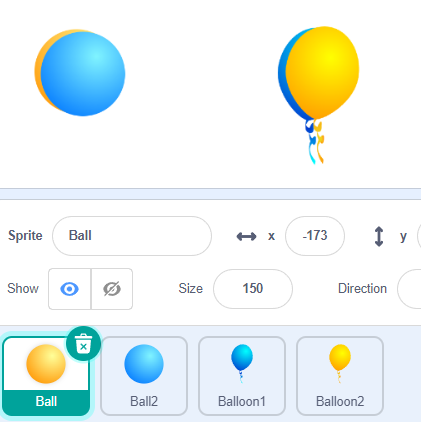
4つのコントロールスプライトを作成し、整然と配置します。
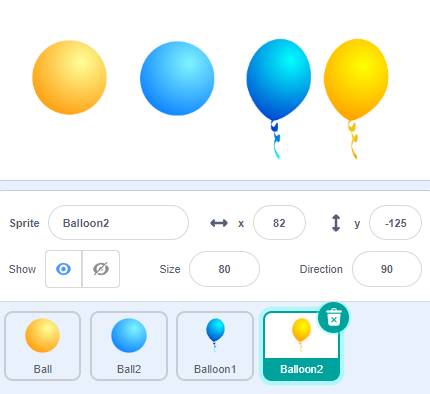
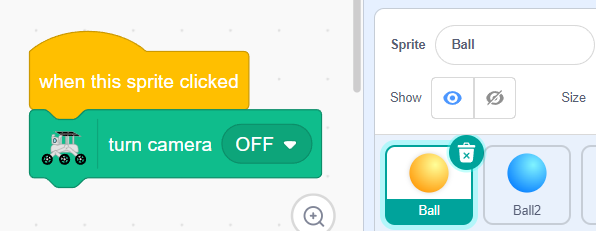
各ボタンの機能をプログラムします:
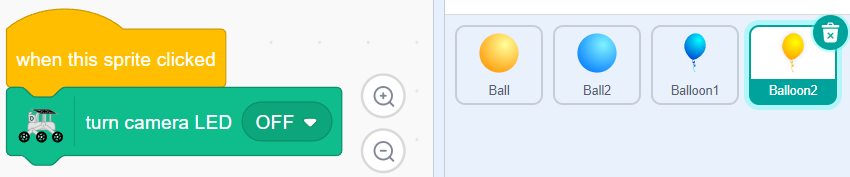
Ball 1:カメラOFF
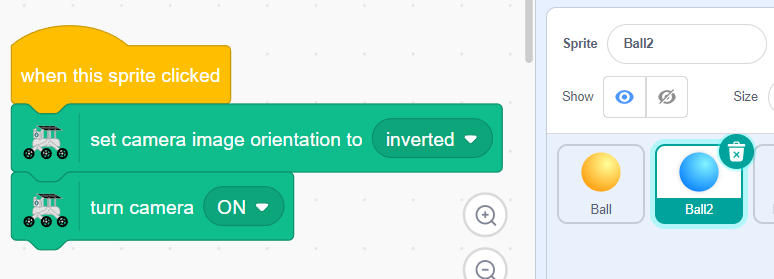
Ball 2:正しい向きでカメラON
Balloon 1:LEDライトON
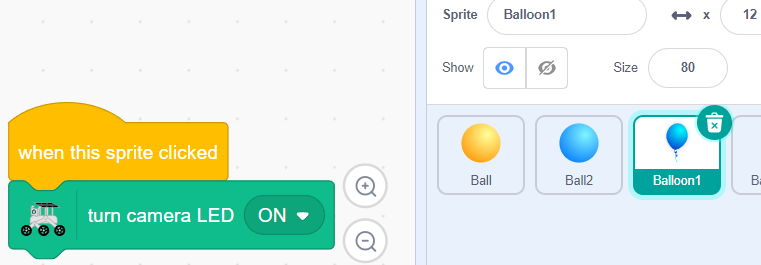
Balloon 2:LEDライトOFF
コントロールを重ねて配置してスペースを節約します。必要なときに展開します!
最背面に行くを追加して、ボタン間のクールなトグル効果を作成します。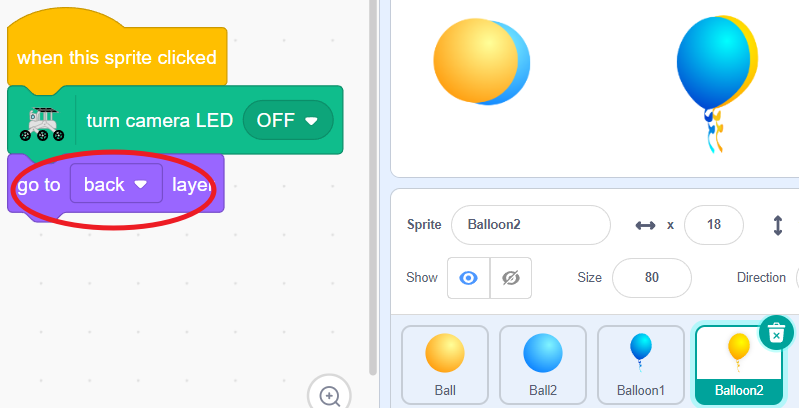
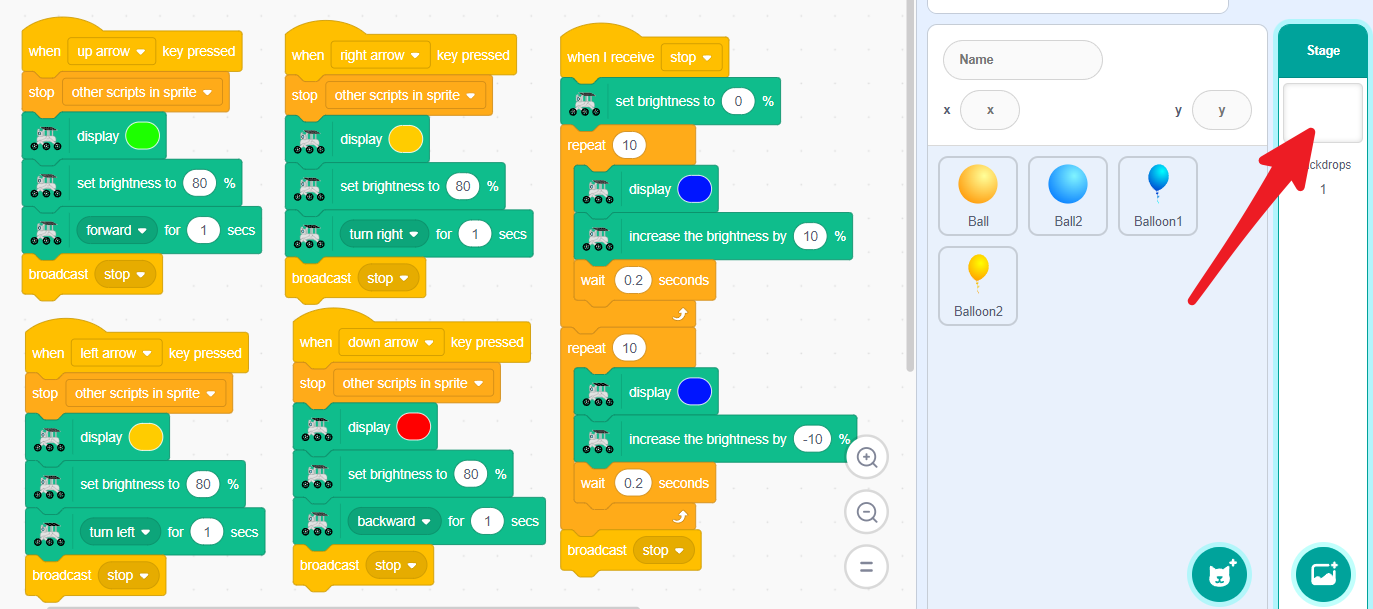
移動&照明システム
ローバーの動きにカラフルなライトを追加しましょう!これらは GalaxyRVRの信号灯を実際に使ってみよう セクションですでにコーディングしています。
このコードは背景セクションに配置することをお勧めします。これにより、スプライトコードから分離され、すべてがより整理されます。
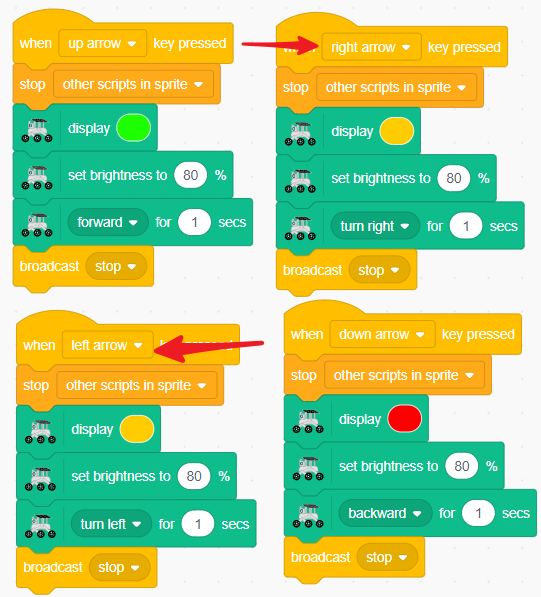
前進時にローバーを 緑色 に光らせます。

後退時にローバーを 赤色 に光らせます。
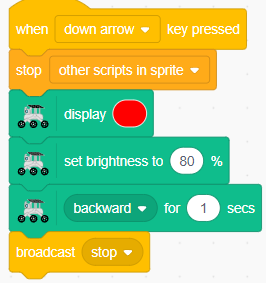
左折または右折時にローバーを 黄色 に光らせます。
ローバーが停止しているときに青い呼吸灯効果を作成します。
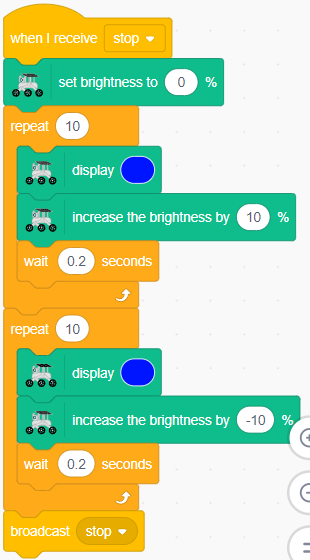
完全な背景コードは次のようになります:
カメラチルトコントロール
カメラコントロールを追加しましょう!この部分は タッチコントロールでカメラ角度を調整 と同じです。手順を繰り返すだけです。
Arrow スプライトを追加してカメラのチルトを制御します。
「このスプライトがクリックされたとき」ブロックから始めます。
矢印に触れている間実行されるループを作成します。
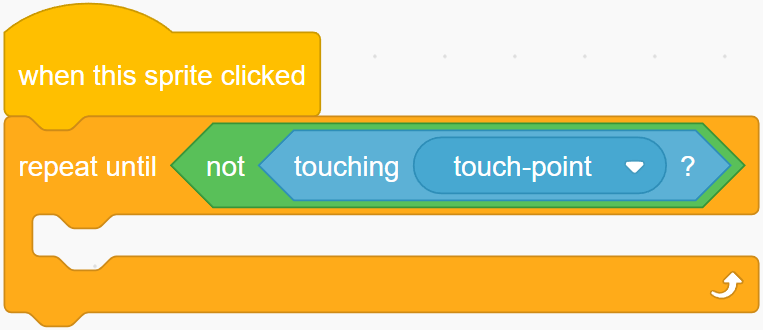
ドラッグすると、矢印が指の方向を向くようにします。
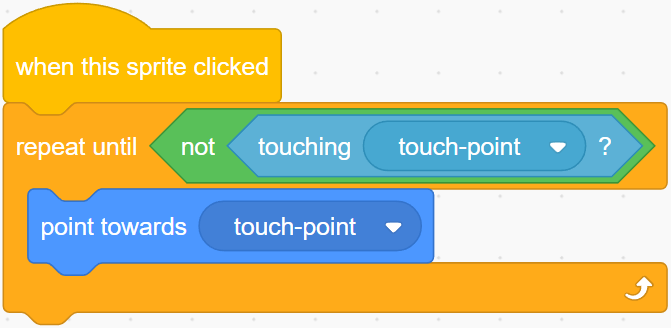
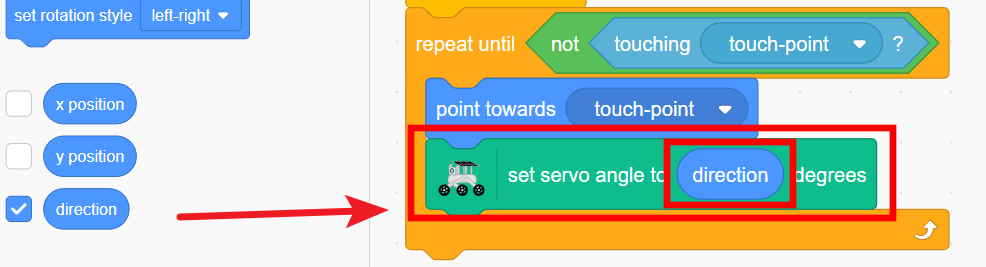
矢印の方向をカメラ角度に接続します。矢印を回してカメラを動かしましょう!
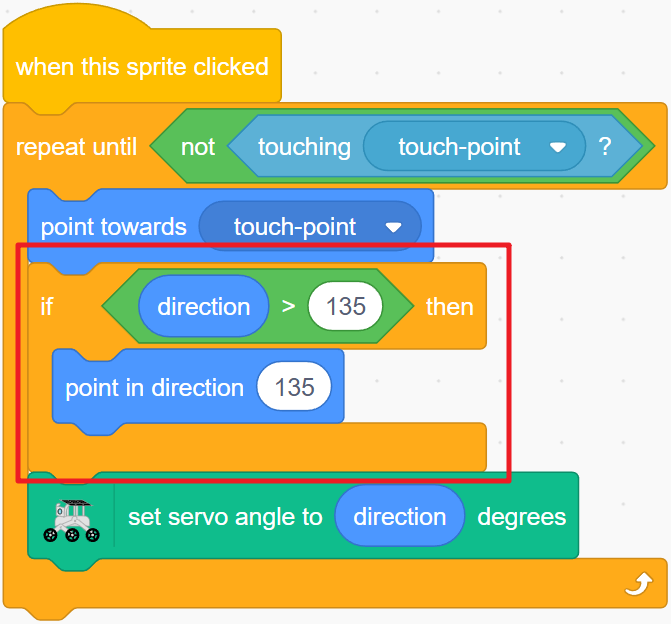
カメラを0~135度の範囲に保つための制限を設定します。
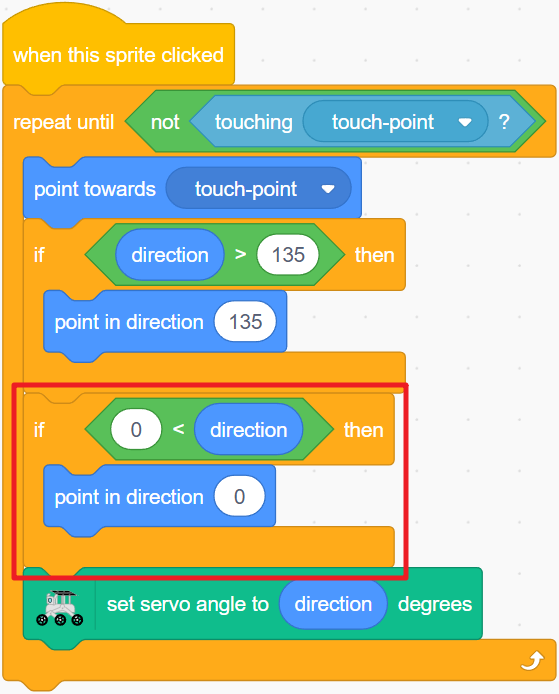
矢印に触れてドラッグし、ローバーのカメラを狙いましょう!制御しにくい場合は矢印を大きくしてください。
GalaxyRVRの完全制御
これでマーズローバーを完全に制御できるようになりました!以下は、完全なGalaxyRVRの操作方法です:
ローバーの操作:
矢印キーを使って前進、後退、旋回
Ballスプライトをクリックしてライブカメラビデオのオン/オフを切り替え
BalloonスプライトをクリックしてカメラLEDライトのオン/オフを制御
矢印スプライトをドラッグしてカメラを上下に傾ける
すべての機能を一緒にテスト:
ローバーからのライブカメラ映像を見ながら走行
各動作を知らせる色付きのライトに注目
カメラを傾けてさまざまな角度から物体を観察する練習
LEDライトを使って明るい場所と暗い場所の両方で探検してみる
おめでとうございます!すべてのシステムを統合して、完全に機能するマーズローバーを作成することに成功しました。移動、照明、カメラ制御、チルト機構のプログラミング方法を学びました。これらはすべて、本物の探査ロボットを操作するために必要なスキルです。
あなたの火星ミッションを開始する準備が整いました。探検を楽しんでください!