注釈
SunFounderのRaspberry Pi & Arduino & ESP32愛好家Facebookコミュニティへようこそ!仲間の愛好家と一緒に、Raspberry Pi、Arduino、ESP32をより深く探求しましょう。
参加する理由
エキスパートサポート:コミュニティとチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学びと共有:スキルを向上させるためのヒントやチュートリアルを交換しましょう。
限定プレビュー:新製品の発表や先行公開にいち早くアクセスできます。
特別割引:最新製品を特別割引価格でご購入いただけます。
お祭りキャンペーンとプレゼント:プレゼント企画やホリデープロモーションに参加しましょう。
👉 一緒に探求し創造する準備はできましたか? [here] をクリックして今すぐ参加しましょう!
レッスン1 マーズローバーの秘密を解き明かそう
レッスン1:マーズローバーを理解しようへようこそ。今日は、火星の遠隔探査車であるマーズローバーのスリリングな世界に飛び込みます。その進化、機能、そして技術的な驚異について学びます。さらに、創造性を発揮して自分だけのローバーをデザインし、そのユニークなデザインを説明することでプレゼンテーションスキルを磨きます。教室から火星探査に出発しましょう!
学習目標
マーズローバーの進化と目的について理解する
自分だけのマーズローバーをデザインして創造性を表現する
ローバーのデザインを共有・説明してプレゼンテーションスキルを向上させる
必要な材料
マーズローバーの画像と参考用の技術仕様
マーズローバーの歴史に関するドキュメンタリービデオ
調査やドキュメンタリー視聴のためのインターネット接続可能なコンピュータ
授業用のプレゼンテーションスライドまたはインタラクティブホワイトボード
ローバーデザイン活動用の画用紙、鉛筆、色材
メモ取り、振り返り、デザイン計画のためのワークシート
手順
ステップ1:マーズローバーとは?
マーズローバーについて詳しく見る前に、まず火星自体について知りましょう。画像やモデルからわかるように、火星の表面はクレーター、山、谷、砂嵐で特徴づけられ、魅力的でありながらも困難な風景を描き出しています。
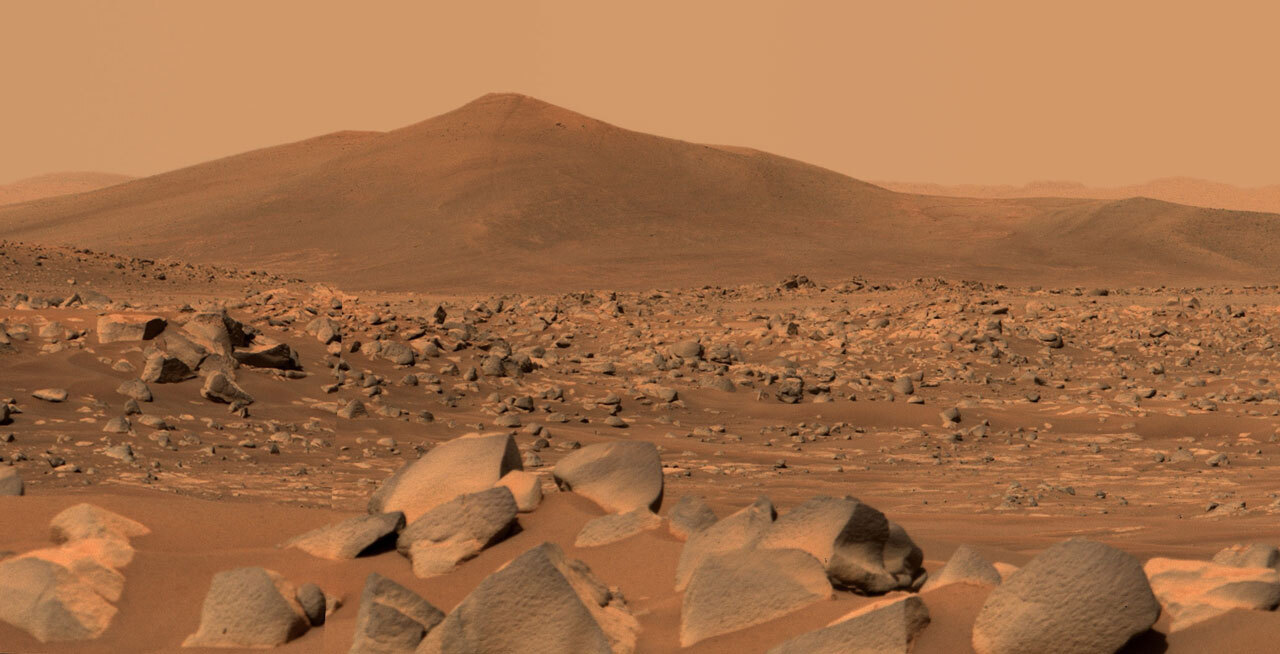

このような起伏の多い地形を移動することを想像できますか?それでは、あなたが火星用のローバーを設計する任務を負ったと仮定しましょう。
火星の地形と条件を考慮して、どのような点に注意しますか?
機能を効果的に果たせるように、どのような機能を装備しますか?
あなたのマーズローバーはどのような任務を達成する必要があると思いますか?
マーズローバーは、火星を探査し、その環境を研究し、データを地球に送信するために設計されたロボットです。移動、通信、電源供給、科学研究能力、そして火星の過酷な条件下での耐久性などの側面について考えてみましょう。
少し時間を取ってアイデアをブレインストーミングし、共有しましょう。エンジニアや科学者のように考えるのは面白いですね。次のステップでは、実際のマーズローバーの設計とその機能についてさらに詳しく見ていきますので、創造的なアイデアを心に留めておいてください。
ステップ2:マーズローバーの歴史を探る
次に、マーズローバーの歴史を詳しく紹介するドキュメンタリーを視聴し、時空を超えた旅に出かけましょう。このドキュメンタリーでは、1971年に着陸に成功しなかったソ連のMars 3ローバーから、1997年のNASA初の成功したマーズローバー Sojourner までを紹介します。
そこからさらに、最先端のローバー Spirit 、 Opportunity 、 Curiosity 、 Perseverance の冒険を理解する旅を続けます。
このドキュメンタリーは歴史的な背景を提供するだけでなく、現在の火星探査時代に至るまでの科学的・工学的な進歩の包括的な理解をもたらします。
ステップ3:マーズローバーをまとめる
ドキュメンタリーを見終えたら、これまで火星に送られた様々なマーズローバーをまとめてみましょう。
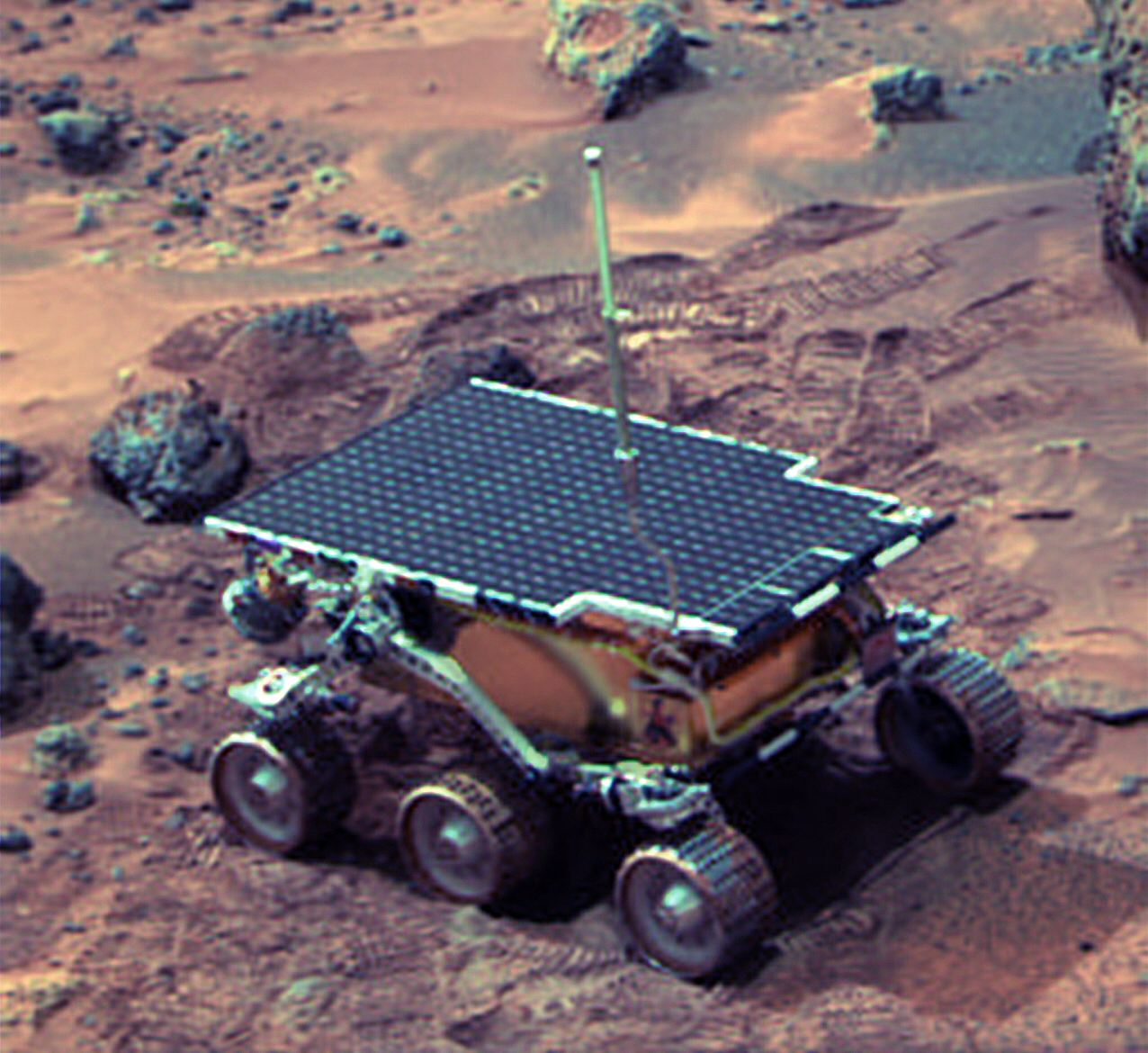
Sojourner (1997年)
Sojourner は、マーズローバーの先駆者として、Mars Pathfinderミッションの一部として旅立ちました。1997年7月4日にAres Vallis地域に着陸に成功しました。地球以外の惑星を走行した最初の車輪付き車両として、 Sojourner は火星探査における重要なマイルストーンを記録しました。火星上での運用期間はわずか92火星日(ソル)でしたが、将来の探査ローバーの基盤を築きました。
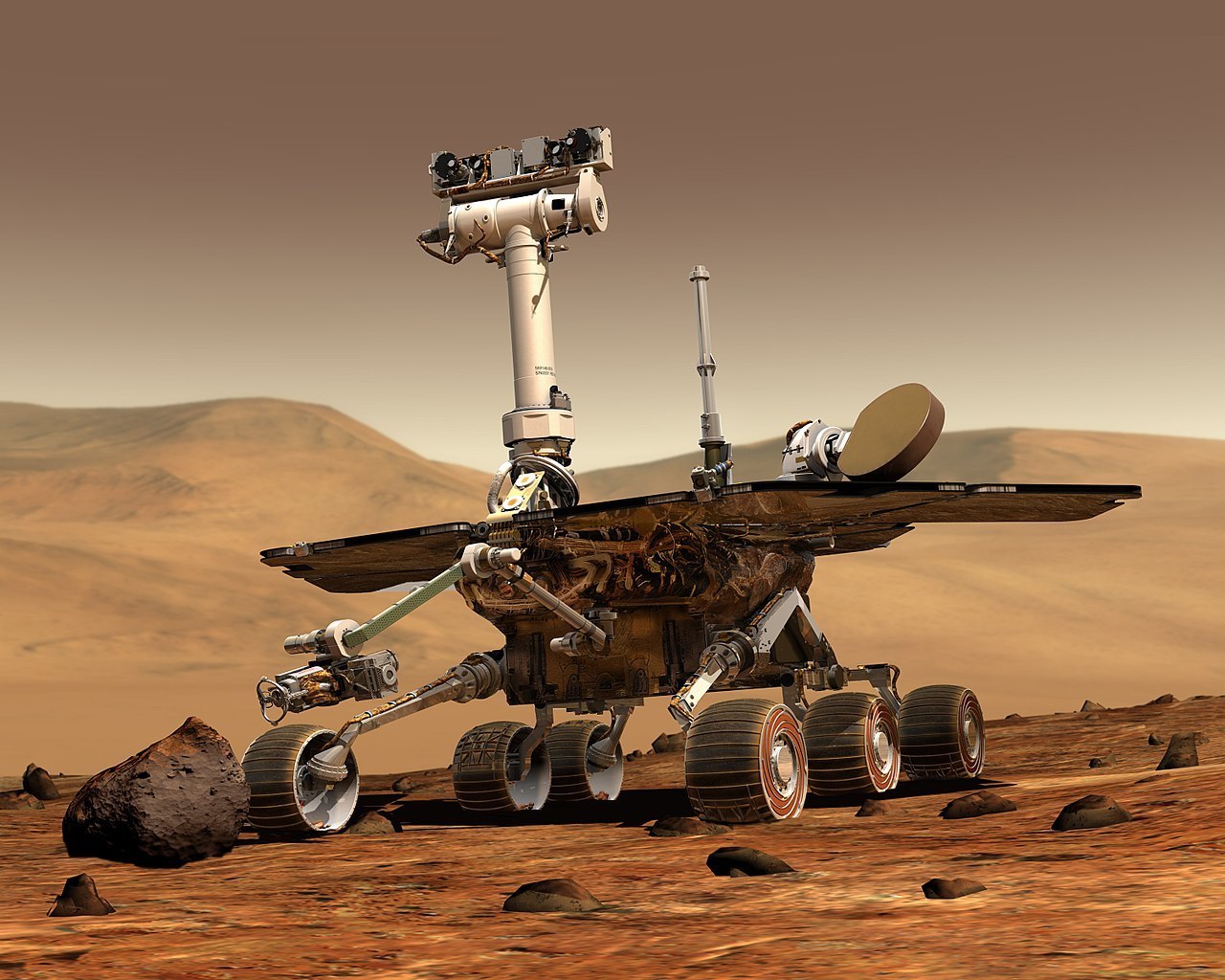
Spirit (2004~2010年)と Opportunity (2004~2018年)
Spirit と Opportunity は、NASAの火星探査ローバー(MER)ミッションの双子のローバーです。 Spirit (別名MER-A)は2004年から2010年まで火星で運用されました。
一方、 Opportunity (別名MER-B)は2004年から2018年まで驚異的な長期運用を続けました。両機は火星の表面と地質学的歴史についての理解を大きく拡大しました。
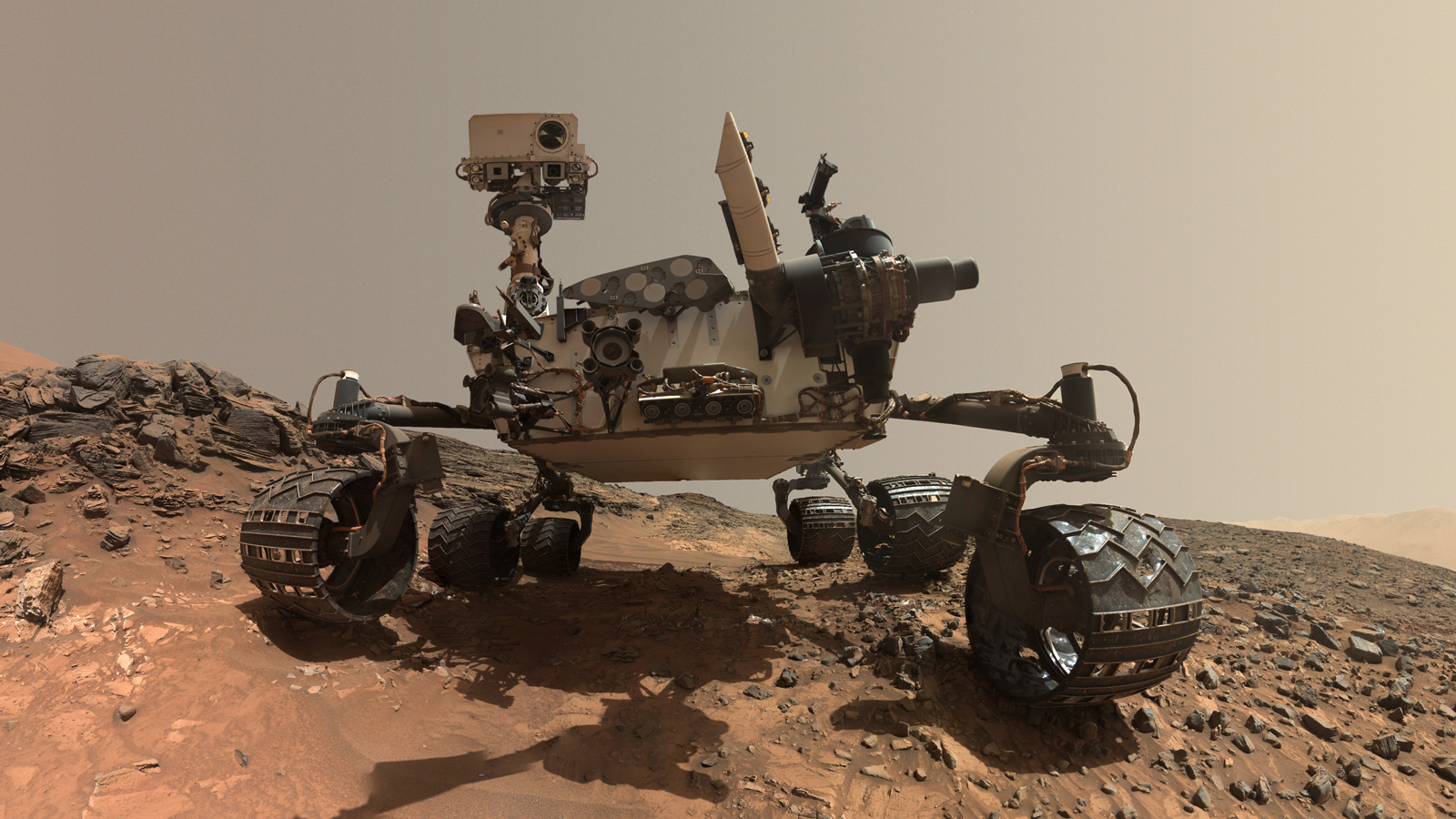
Curiosity (2012年~現在):
Curiosity は、自動車サイズのマーズローバーで、NASAの火星科学実験室(MSL)ミッションの一部として火星のゲイルクレーターを探査するために設計されました。2012年に到着して以来、 Curiosity は過去の火星における液体水の証拠を含む、数多くの重要な発見を行っています。
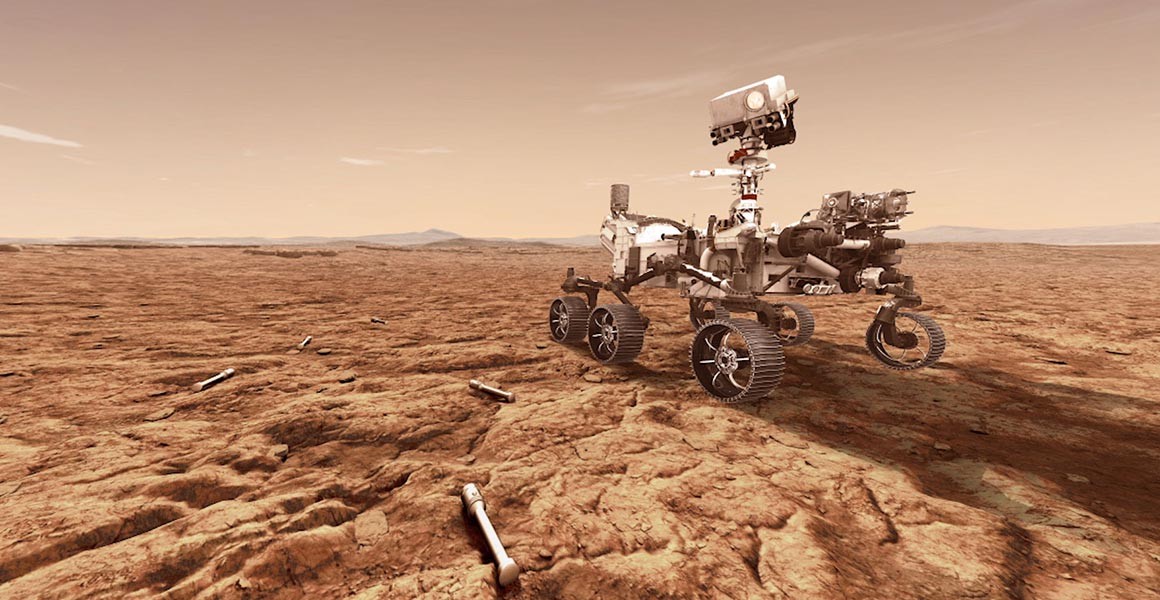
Perseverance (2021年~現在):
Perseverance (通称Percy)は、火星に到着した最新のローバーです。NASAのMars 2020ミッションの一部として、ジェゼロクレーターを探査するために設計されています。科学機器に加えて、 Perseverance は小型実験用火星ヘリコプター Ingenuity も搭載しており、火星探査における新たな先駆けとなっています。
それでは、話し合いをしましょう。これらのローバーの進化について振り返ってみてください。
これらのローバーのデザインはどのように異なりますか?どのように類似していますか?
ミッションの目的は各ローバーのデザインにどのような影響を与えましたか?
各ローバーの間でどのような技術の進歩が見られますか?
次世代のマーズローバーにはどのような機能が必要だと思いますか?
あなたの考えや気づき、そして質問があれば共有しましょう!
ステップ4:アート活動:自分だけのマーズローバーを描こう
次の活動では、知識と創造性を活かして、自分だけのマーズローバーをデザインしましょう。これまで学んだローバーの主要な特徴を考慮しつつ、自分のデザインに取り入れたいユニークな属性についても考えてみましょう。
必要な材料:
画用紙
鉛筆と消しゴム
色鉛筆、クレヨン、またはマーカー
描画の手順:
ローバーの本体から始めましょう。どんな形にしますか?どのくらいの大きさですか?
車輪について考えましょう。ローバーにはいくつの車輪がありますか?サイズや形はどうしますか?
計器類も忘れずに。ローバーにはどのような科学機器を搭載しますか?カメラ、ドリル、分光計、またはまったく新しいもの?
最後に、ユニークな機能を検討しましょう。ローバーにはソーラーパネルがありますか、それとも別の電源を使用しますか?地球と直接通信できますか、それとも中継衛星が必要ですか?
全員が描き終えたら、クラスで共有しましょう。デザインの選択理由と、ローバーに託すミッションについて説明してください。
ステップ5:マーズローバーのデザインを発表しよう
全員がマーズローバーの絵を完成させたので、発表の時間です。発表の際には、デザインの背後にある思考プロセスについて説明してください。あなたのローバーのミッションは何ですか?デザインはどのようにそのミッションをサポートしていますか?
この活動に間違った答えはありません。目的は創造性を刺激し、マーズローバー技術への理解を深めることです。
ステップ6:振り返りとまとめ
マーズローバーのレッスンを締めくくるにあたり、学んだことを振り返る時間を取りましょう。私たちのローバーのデザインは、技術の進歩や科学的な目的をどのように反映しているでしょうか?実際のマーズローバーは将来、どのように進化し続けるのでしょうか?
宇宙探査は、他のSTEAM分野と同様に、質問をし、問題を解決し、創造性を活用することがすべてです。探求を続け、質問を続け、そして好奇心を持ち続けてください!