注釈
SunFounderのRaspberry Pi & Arduino & ESP32愛好家Facebookコミュニティへようこそ!仲間の愛好家と一緒に、Raspberry Pi、Arduino、ESP32をより深く探求しましょう。
参加する理由
エキスパートサポート:コミュニティとチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学びと共有:スキルを向上させるためのヒントやチュートリアルを交換しましょう。
限定プレビュー:新製品の発表や先行公開にいち早くアクセスできます。
特別割引:最新製品を特別割引価格でご購入いただけます。
お祭りキャンペーンとプレゼント:プレゼント企画やホリデープロモーションに参加しましょう。
👉 一緒に探求し創造する準備はできましたか? [here] をクリックして今すぐ参加しましょう!
レッスン3:GalaxyRVRを遠隔操作しよう
コントロールを握る準備はできましたか?このレッスンでは、あなた自身のGalaxyRVRマーズローバーのミッションコマンダーになります。
コーディングの知識を実際の動作に変え、シミュレートされた火星の地形をローバーにナビゲートさせるプログラムを作成します。あなたのコマンドがローバーを動かし、教室で思い通りに操縦する様子を見守りましょう。
ここからあなたの火星ミッションが真に始まります。さあ、運転を始めましょう!
学習目標
必要なArduinoコードをアップロードして、Mammoth CodingアプリとGalaxyRVRの間の通信をセットアップする
アプリの矢印キーインターフェースを使用してローバーの動きをマスターする
前進、後退、左折、右折の4つの基本動作をプログラムして実行する
アプリをGalaxyRVRに接続する
注釈
ファームウェアを上書きしてしまい、通信を復元する必要がある場合は、3. R3 ボードファームウェアの更新 に従ってください。
GalaxyRVRを初めて使用する前に、付属のType-C USBケーブルでバッテリーを完全に充電してください。充電後、電源を入れます。
ESP32 CAMを起動するには、モードを Run に切り替え、R3ボードの Reset ボタンを押します。下部のライトストリップが点滅し始め、起動が成功したことを示します。
注釈
下部のライトストリップが 緑色以外の色で点滅している 場合、GalaxyRVRのファームウェアを更新する必要があります。ファームウェアの更新 を参照してください。
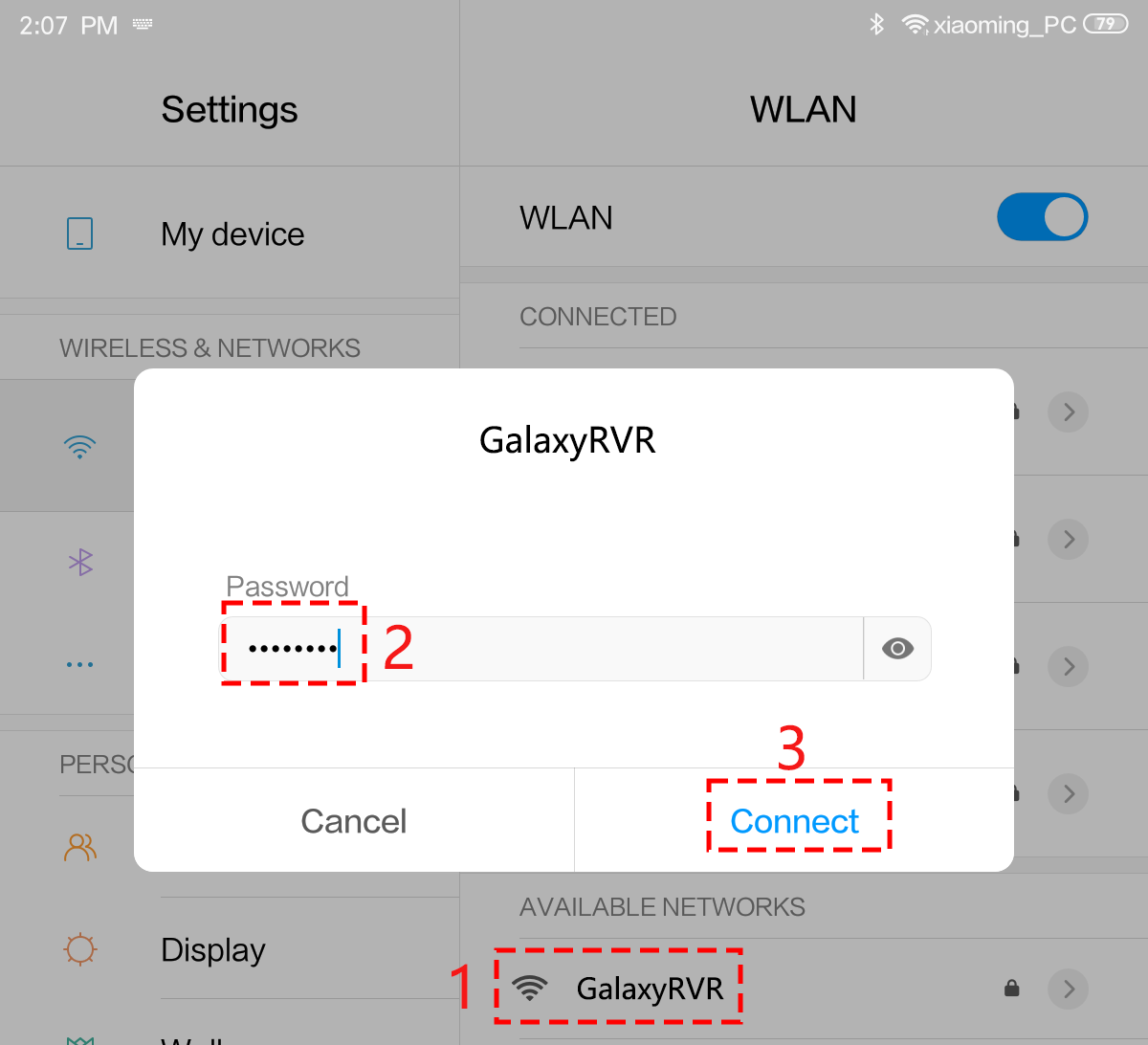
モバイルデバイスをGalaxyRVRのWi-Fiネットワークに接続します。
ネットワーク名(SSID)は
GalaxyRVR、パスワードは12345678です。「インターネットなし」 の警告が表示された場合は、** 「接続したままにする」** を選択してください。
モバイルデバイスでアプリケーションを開き、接続プロセスを開始します。
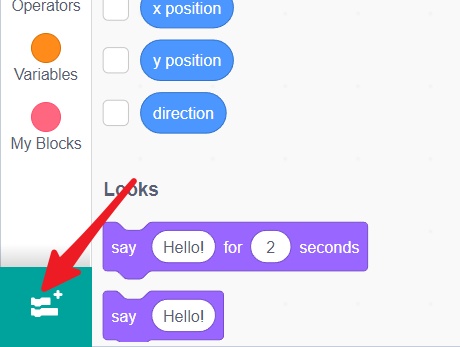
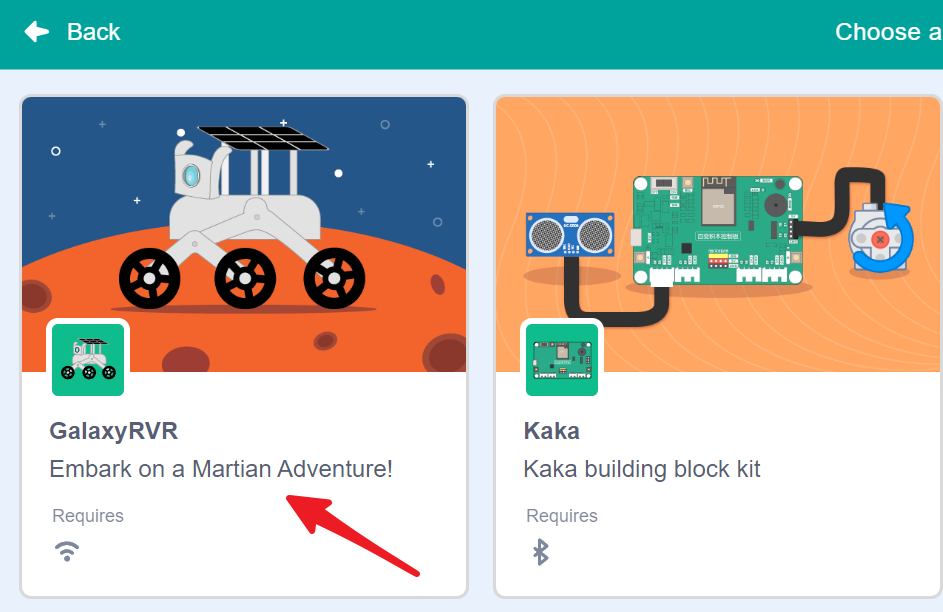
アプリ内でGalaxyRVR拡張機能を選択してロードします。
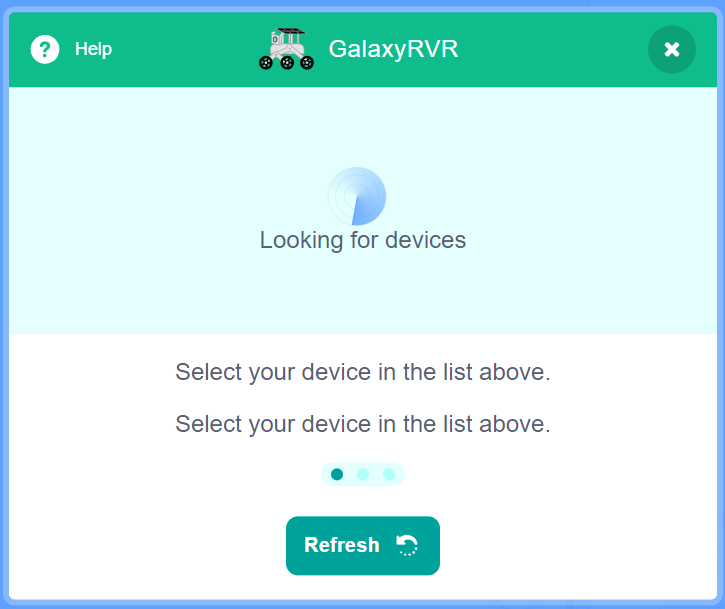
アプリが自動的に利用可能なGalaxyRVRデバイスをスキャンして検索します。
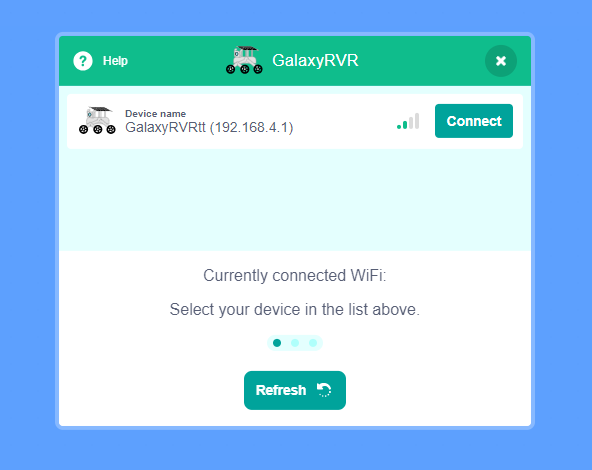
リストからGalaxyRVRを選択して接続します。
注釈
接続状態はGalaxyRVRのLEDライトで示されます:
紫色の点滅 :接続を検索中
消灯 :接続成功、準備完了
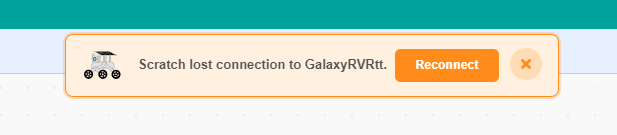
アプリの再接続
デバイスがGalaxyRVRから切断されると、インターフェースにこのポップアップウィンドウが表示されます。再接続をクリックします。
ポップアップウィンドウを閉じた場合は、GalaxyRVRカテゴリのこのボタンをクリックして再接続することもできます。
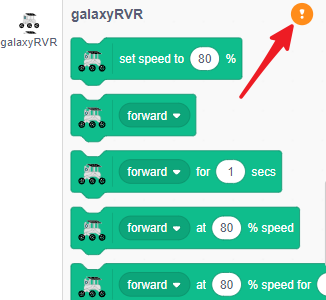
GalaxyRVRを見つけて、接続をクリックします。
アプリでGalaxyRVRを制御する
コーディングインターフェースで、ローバー制御ブロック専用のGalaxyRVRカテゴリを見つけます。
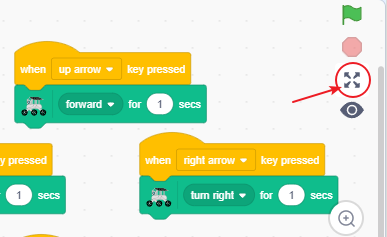
通常は緑色の旗を使用してプログラムを開始しますが、アクションをトリガーする他の方法もあります。イベントカテゴリにある
上向き矢印キーが押されたときブロックを見つけます。これは特定のキーを押したときにコードを実行します。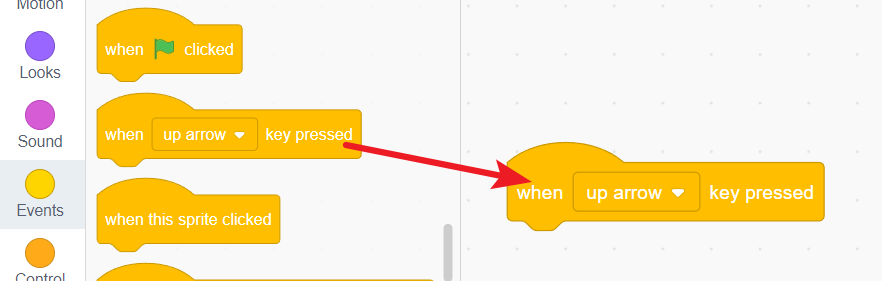
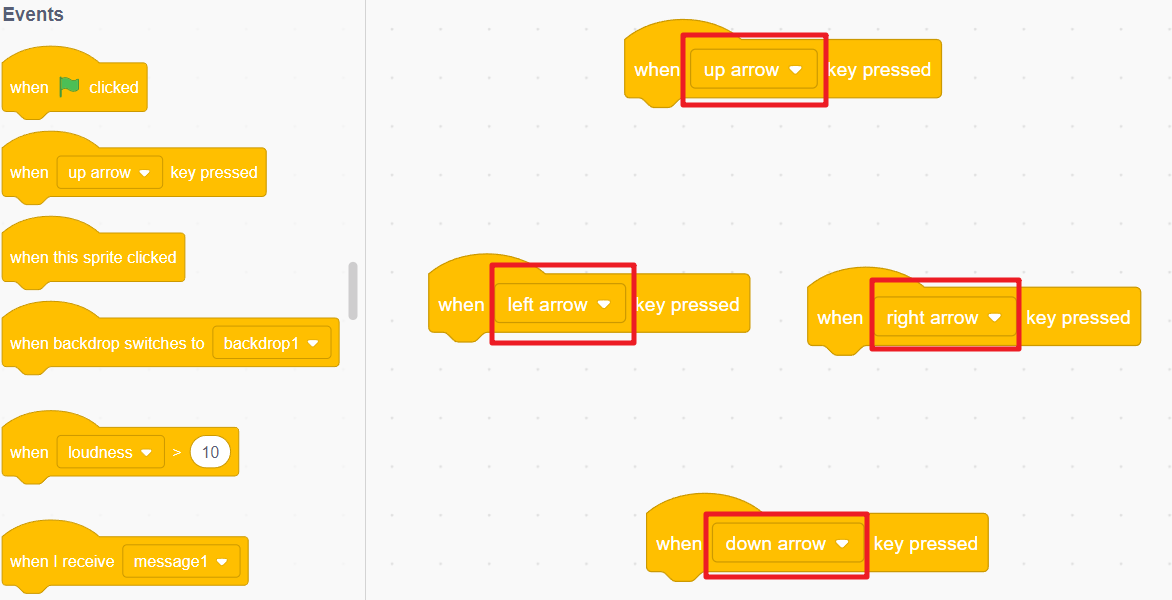
矢印の方向(上、下、左、右)ごとに1つずつ、4つのイベントブロックを作成します。これがローバーの制御システムの基礎となります。
注釈
もっとコーディングスペースが必要ですか?緑色の旗の下にある目のアイコンをクリックすると、ステージエリアを一時的に非表示にできます。
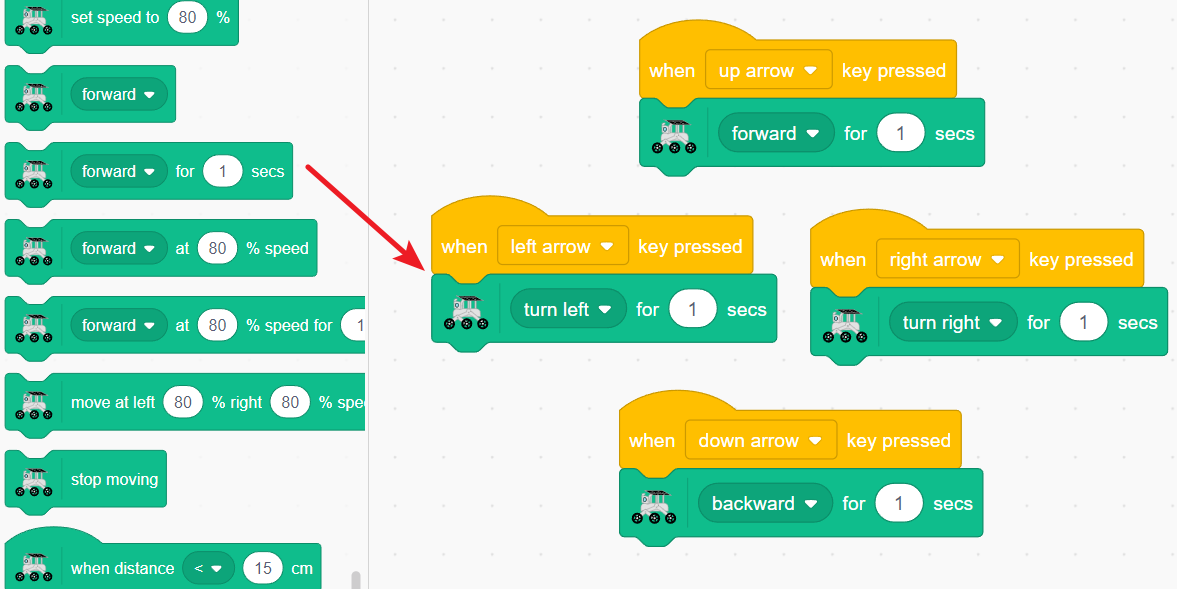
次に、各イベントブロックに対応する移動コマンドを追加します。
上矢印 → 前進
下矢印 → 後退
左矢印 → 左折
右矢印 → 右折
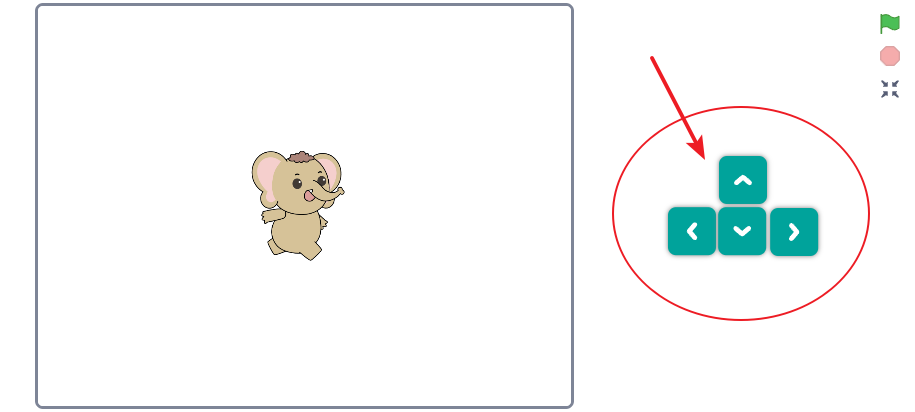
ステージ拡張ボタンをクリックして、フルコントロールモードに入ります。
拡大されたステージと仮想方向キーが表示されます。これらのキーを押して、GalaxyRVRの動きをリアルタイムで直接制御しましょう!
移動制御ブロック
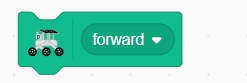
基本方向制御
GalaxyRVRの移動方向を制御します。ドロップダウンメニューから前進、後退、左折、右折を選択します。
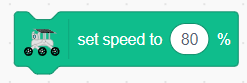
速度設定
GalaxyRVRの移動速度を設定します。注意:このブロックは速度を設定するだけで、それ自体では移動を開始しません。
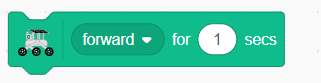
時間指定移動
選択した方向に指定した時間だけGalaxyRVRを移動させます。以下のことができます:
ドロップダウンから方向(前進/後退/左/右)を選択
時間の値を変更して移動時間を設定
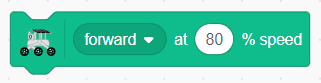
速度制御移動
特定の速度パーセントでGalaxyRVRを移動させます。以下のことができます:
ドロップダウンから移動方向を選択
速度パーセント(0~100%)を調整
精密移動制御
速度と時間の制御を組み合わせて正確な移動を実現します。以下のことができます:
移動方向を設定
速度パーセントを調整
移動時間を設定

高度なホイール制御
各ホイールを個別に制御して複雑な操作を実現します。以下のことができます:
左ホイールの速度を個別に設定
右ホイールの速度を個別に設定
移動時間を制御

緊急停止
GalaxyRVRのすべての動きを即座に停止します。