注釈
SunFounderのRaspberry Pi & Arduino & ESP32愛好家Facebookコミュニティへようこそ!仲間の愛好家と一緒に、Raspberry Pi、Arduino、ESP32をより深く探求しましょう。
参加する理由
エキスパートサポート:コミュニティとチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学びと共有:スキルを向上させるためのヒントやチュートリアルを交換しましょう。
限定プレビュー:新製品の発表や先行公開にいち早くアクセスできます。
特別割引:最新製品を特別割引価格でご購入いただけます。
お祭りキャンペーンとプレゼント:プレゼント企画やホリデープロモーションに参加しましょう。
👉 一緒に探求し創造する準備はできましたか? [here] をクリックして今すぐ参加しましょう!
レッスン9:火星探検のパートナー
ローバーが見事に障害物を回避できるようになったので、新しい技を教えましょう。目標物を追跡します!このミッションでは、障害物を回避するローバーを、あなたについてくる忠実なコンパニオンに変身させます。
フォローと回避の違いは何でしょうか?
回避 :物体から遠ざかる(岩を避けるなど)
追跡 :物体に向かって移動する(友達について行くなど)
あなただけの火星探検バディをプログラミングする準備をしましょう!
学習目標
超音波センサーと赤外線センサーを組み合わせて追跡ローバーを作成する
マーズローバーが自動的に移動する目標物を追跡して追いかけるようにプログラムする
追跡ローバーの作成
まず、アプリをGalaxyRVRに接続する を行います。
次に、レッスン8で保存したプロジェクトを開きます。
元のプロジェクトを安全に保つためにコピーを保存します。「コピーを保存」をクリックします。
新しいプロジェクトに「Mars Follower」や「Rover Buddy」のような楽しい名前を付けます。
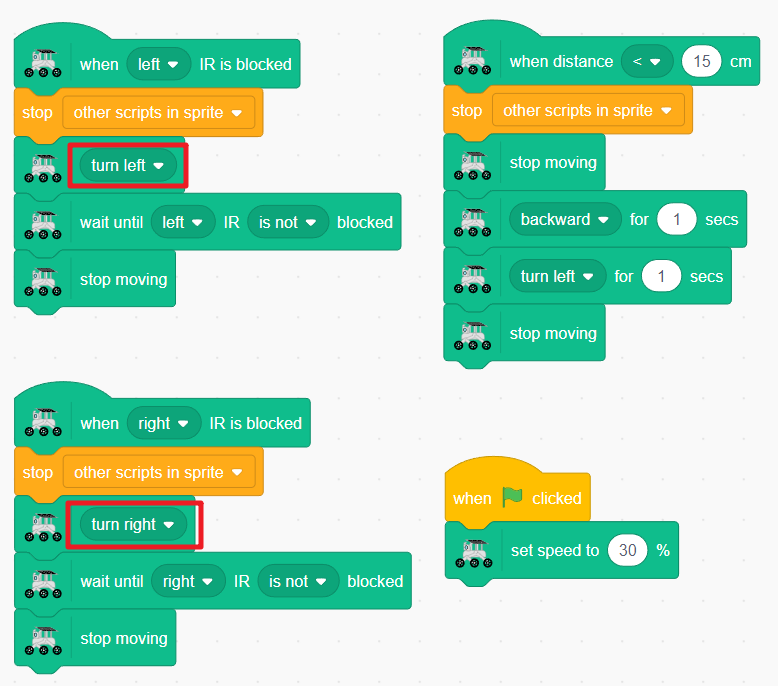
各センサーイベントの最後にある「前進」ブロックを削除します。追跡ローバーは各アクションの後に停止して待機する必要があります。
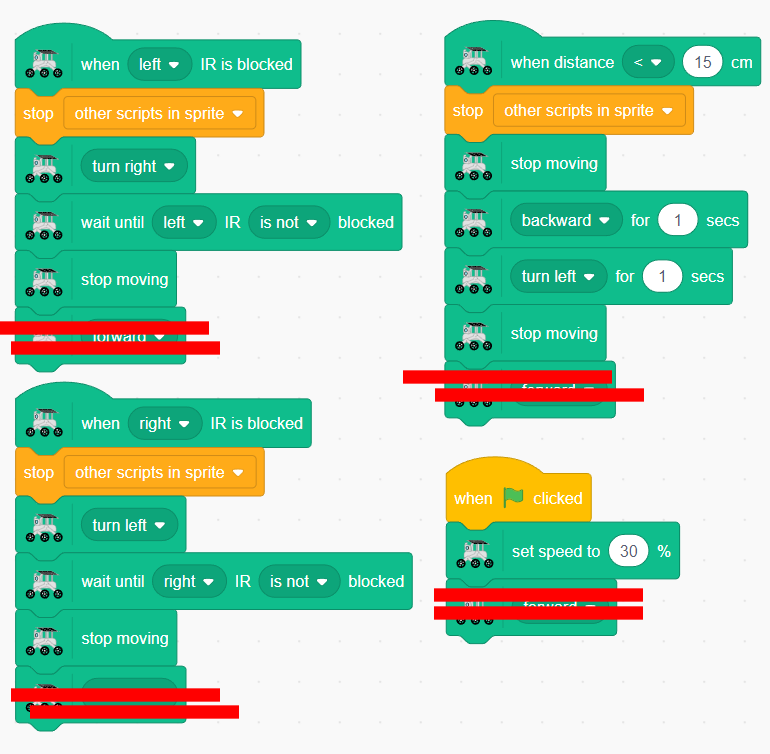
次に、IRセンサーを再プログラムしましょう!ローバーが障害物から遠ざかるのではなく、目標物の 方向に 向くように旋回方向を変更します。
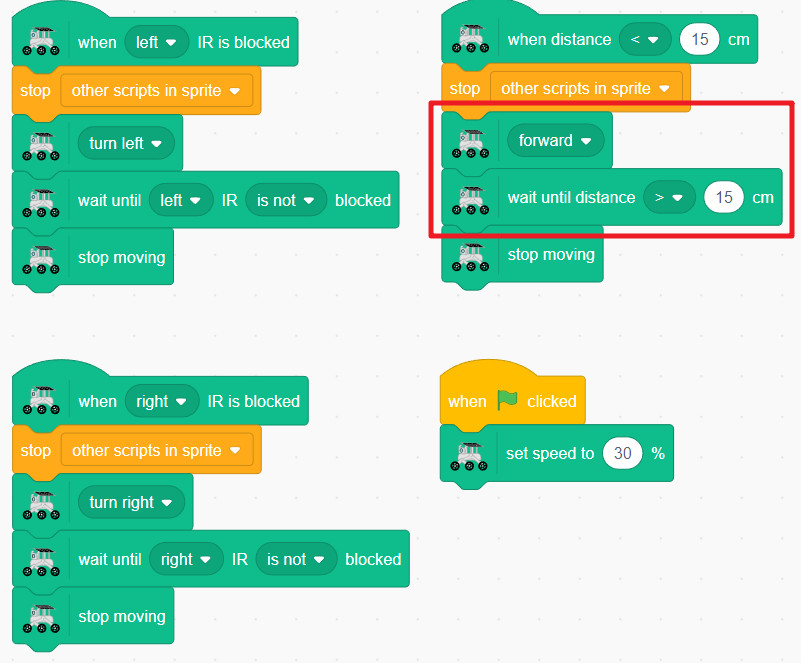
最後に、超音波センサーの動作を更新します。後退する代わりに、前方に目標物を検出したときに 前進 するようにします。
素晴らしい!GalaxyRVRがあなたの火星探検パートナーになりました。テストしてみましょう:
ローバーの横を歩く → あなたの方を向きます
前に立つ → あなたに向かって進みます
遠ざかる → 停止して待機します
ローバーバディは、次の宇宙冒険であなたについて行く準備ができました!