Nota
¡Hola, bienvenido a la comunidad de entusiastas de Raspberry Pi, Arduino y ESP32 de SunFounder en Facebook! Sumérgete en el mundo de Raspberry Pi, Arduino y ESP32 con otros entusiastas.
¿Por qué unirse?
Soporte experto: Resuelve problemas postventa y desafíos técnicos con la ayuda de nuestra comunidad y equipo.
Aprende y comparte: Intercambia consejos y tutoriales para mejorar tus habilidades.
Avances exclusivos: Accede antes a los anuncios de nuevos productos y avances exclusivos.
Descuentos especiales: Disfruta de descuentos exclusivos en nuestros productos más recientes.
Promociones festivas y sorteos: Participa en sorteos y promociones festivas.
👉 ¿Listo para explorar y crear con nosotros? ¡Haz clic en [aquí] y únete hoy!
Lección 9: Compañero de Exploración en Marte
Ahora que nuestro Rover puede esquivar obstáculos con habilidad, enseñémosle un nuevo truco: ¡seguir un objetivo! En esta misión, transformaremos nuestro rover evasor de obstáculos en un compañero leal que pueda seguirte a donde vayas.
¿Cuál es la diferencia entre seguir y esquivar?
Esquivar: Alejarse de objetos (como esquivar rocas)
Seguir: Moverse hacia objetos (como seguir a un amigo)
¡Prepárate para programar tu propio compañero de exploración marciana!
Objetivos de Aprendizaje
Combinar sensores ultrasónicos e infrarrojos para crear un rover seguidor
Programar tu Mars Rover para que rastree y siga automáticamente un objetivo en movimiento
Creando Tu Rover Seguidor
Primero, Conectando la Aplicación a GalaxyRVR.
Ahora, abre tu proyecto guardado de la Lección 8.
Guarda una copia para mantener tu proyecto original a salvo. Haz clic en «Guardar como copia».
Dale a tu nuevo proyecto un nombre divertido como «Mars Follower» o «Rover Buddy».
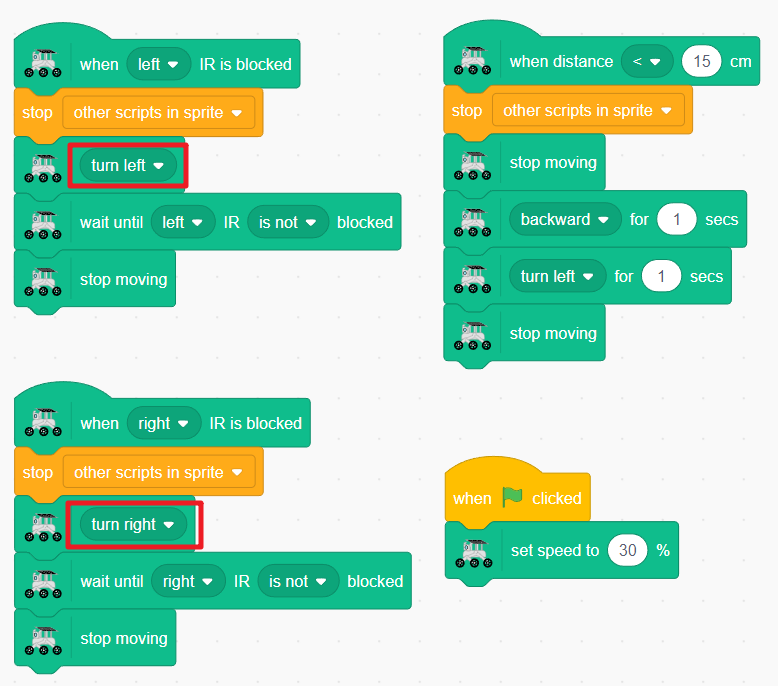
Elimina los bloques de «avanzar» del final de cada evento de sensor. Nuestro seguidor debe detenerse y esperar después de cada acción.
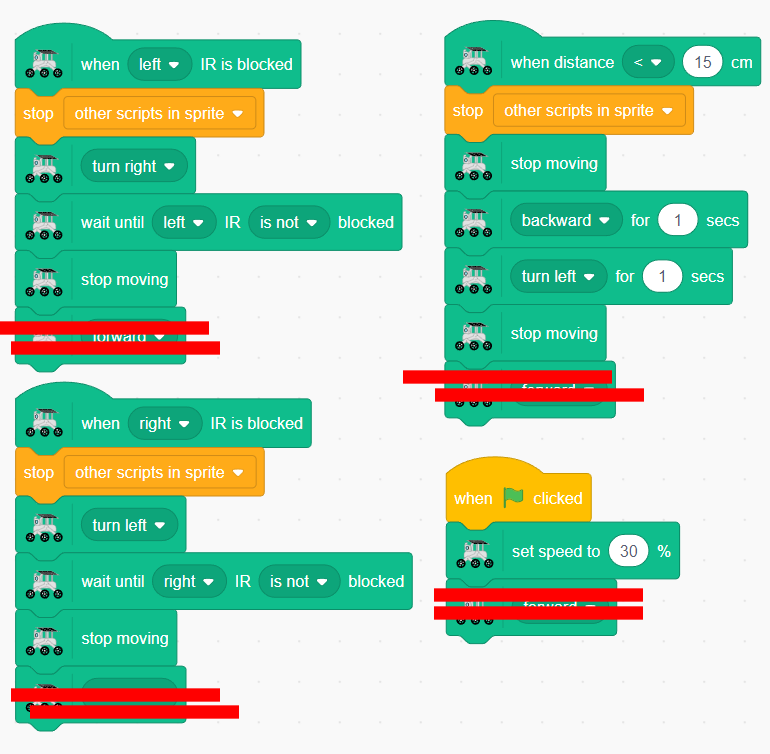
¡Ahora reprogramemos los sensores IR! Cambia las direcciones de giro para que el rover gire HACIA el objetivo en lugar de alejarse de él.
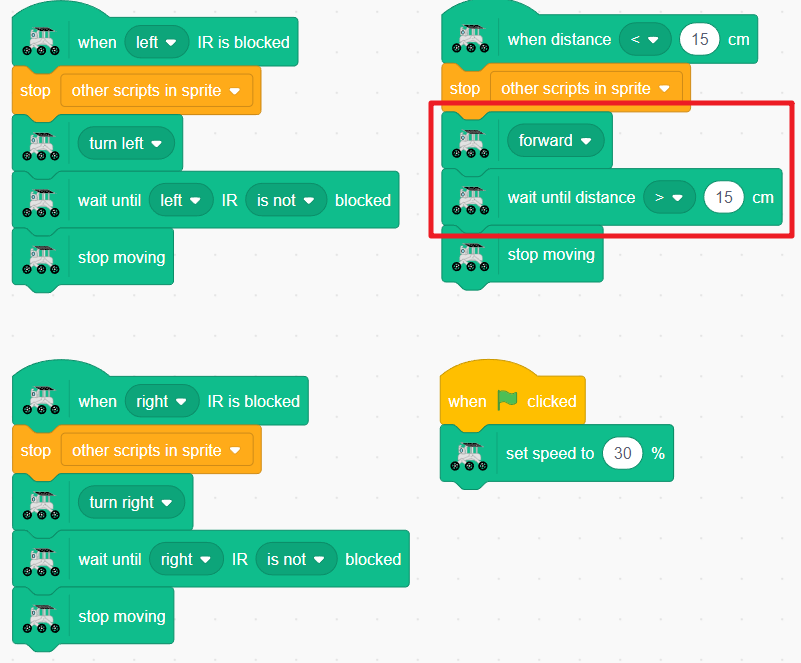
Finalmente, actualiza el comportamiento del sensor ultrasónico. En lugar de retroceder, haz que se mueva HACIA ADELANTE cuando detecte un objetivo al frente.
¡Increíble! Tu GalaxyRVR es ahora tu compañero de exploración marciana. Pruébalo:
Camina a su lado —gira para mirarte
Colócate al frente —se mueve hacia ti
Aléjate —se detiene y espera
¡Tu rover compañero está listo para seguirte en tu próxima aventura espacial!