Nota
¡Hola, bienvenido a la comunidad de entusiastas de Raspberry Pi, Arduino y ESP32 de SunFounder en Facebook! Sumérgete en el mundo de Raspberry Pi, Arduino y ESP32 con otros entusiastas.
¿Por qué unirse?
Soporte experto: Resuelve problemas postventa y desafíos técnicos con la ayuda de nuestra comunidad y equipo.
Aprende y comparte: Intercambia consejos y tutoriales para mejorar tus habilidades.
Avances exclusivos: Accede antes a los anuncios de nuevos productos y avances exclusivos.
Descuentos especiales: Disfruta de descuentos exclusivos en nuestros productos más recientes.
Promociones festivas y sorteos: Participa en sorteos y promociones festivas.
👉 ¿Listo para explorar y crear con nosotros? ¡Haz clic en [aquí] y únete hoy!
Preguntas frecuentes
1. ¿Por qué debería actualizar el firmware?
SunFounder mejora continuamente el firmware de GalaxyRVR para ofrecer una mejor experiencia. Recomendamos actualizar el firmware antes del primer uso para garantizar que todo funcione correctamente. La actualización del firmware garantiza:
Corrección de errores: Resuelve problemas conocidos y mejora la estabilidad.
Compatibilidad con las aplicaciones: La versión más reciente del firmware es necesaria para que la aplicación RoboPilot y Mammoth Coding funcionen correctamente.
Nuevas funciones: Las actualizaciones del firmware pueden añadir nuevas capacidades y mejoras.
Mejor rendimiento: Optimizaciones para la conectividad WiFi, la transmisión de la cámara y el control de los motores.
Para obtener instrucciones detalladas de actualización, consulte Actualizar Firmware.
Nota
Si prefiere no actualizar el firmware y desea seguir usando su configuración actual, puede consultar la Documentación de GalaxyRVR v1.
2. ¿No se puede conectar a GalaxyRVR?
Si no puede conectarse a GalaxyRVR, compruebe lo siguiente:
Revise la batería: Observe los indicadores de batería en el rover. Si ambos LED están apagados, la batería está baja. Cargue el rover con un cable USB tipo C.
Revise el ESP32 CAM: Asegúrese de que el ESP32 CAM esté correctamente insertado en su ranura. Si el LED del ESP32 CAM no se enciende, es posible que el módulo de la cámara no esté recibiendo alimentación o esté dañado. El ESP32 CAM crea el punto de acceso WiFi; si no funciona, no aparecerá ninguna red.
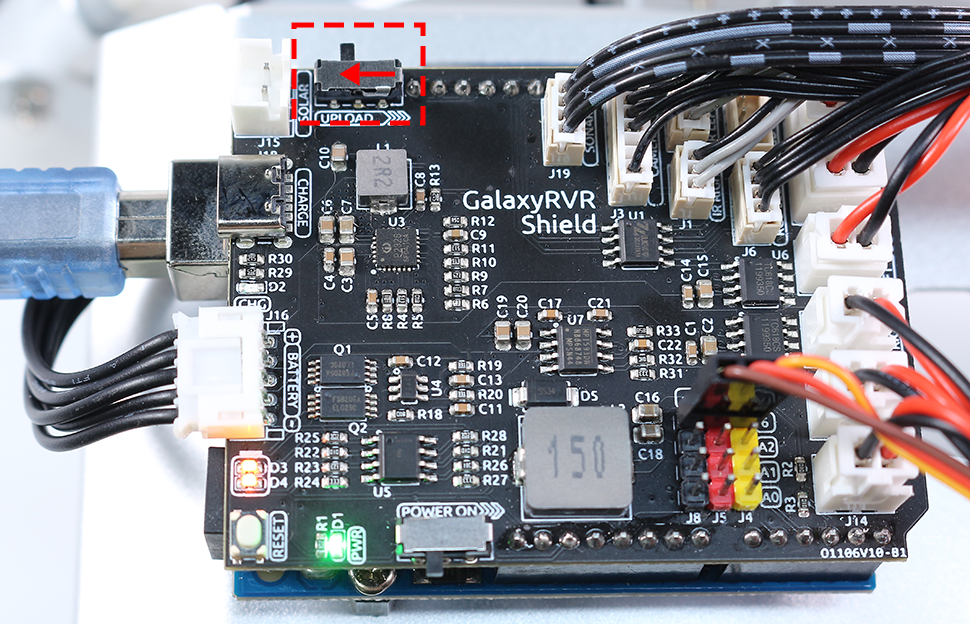
Revise el interruptor de modo: Asegúrese de que el interruptor de modo esté en Run (no en Upload). El punto de acceso WiFi solo funciona en el modo Run.
Reinicie la placa R3: Después de cambiar al modo Run, pulse el botón Reset de la placa R3. La tira de luz inferior debería parpadear para indicar un inicio correcto.
Revise la contraseña WiFi: El nombre del punto de acceso (SSID) predeterminado es
GalaxyRVRy la contraseña es12345678. Asegúrese de haber introducido la contraseña correctamente.Interferencia WiFi: Otros dispositivos en el mismo canal WiFi pueden causar problemas de conexión. Si sospecha que hay interferencias, intente cambiar el canal WiFi.
Después de actualizar el firmware: Si acaba de actualizar el firmware del ESP32 CAM y el WiFi dejó de funcionar, consulte 12. ¿Cómo restaurar los ajustes de fábrica del ESP32 CAM?.
Verifique la conexión de su dispositivo móvil: Si está usando GalaxyRVR en modo AP (predeterminado), conecte su dispositivo móvil al punto de acceso de GalaxyRVR. Si ha configurado una red WiFi doméstica, asegúrese de que su dispositivo móvil esté conectado a la misma red WiFi doméstica.
3. ¿La luz inferior es naranja fijo y no aparece el punto de acceso WiFi?
Si la tira de luz inferior de GalaxyRVR muestra una luz naranja fija y la red WiFi GalaxyRVR no aparece, la causa es una incompatibilidad de versiones del firmware:
El firmware del ESP32 CAM sigue siendo una versión anterior (1.4.x o 1.3.x)
El firmware de la placa UNO R3 se ha actualizado a la versión 2.x
La incompatibilidad de versiones impide la comunicación entre el ESP32 CAM y la UNO R3
Para resolverlo, siga estos pasos en el orden exacto:
Primero, revierta el firmware de la UNO R3 a la versión 1.x:
Siga la guía en la documentación v1: GalaxyRVR v1 — Cómo cargar el código galaxy-rvr.ino
Actualice ambos firmware siguiendo el orden ESP32 CAM → UNO R3:
Siga la guía actualizada: Actualizar Firmware
Nota
El orden es importante: actualice siempre primero el ESP32 CAM y luego la placa R3. Omitir el paso de reversión o cambiar el orden no solucionará el problema.
4. ¿La aplicación RoboPilot no puede conectar?
Si la aplicación RoboPilot no encuentra o no puede conectarse a su GalaxyRVR, compruebe lo siguiente:
¿Está actualizado el firmware del ESP32 CAM? Un firmware desactualizado del ESP32 CAM puede causar problemas de conexión. Siga 2. Actualizar el Firmware de la ESP32 CAM para verificar y actualizar.
¿Está actualizado el firmware de la R3? La placa R3 debe tener instalado el firmware de comunicación de fábrica. Si ha cargado código Arduino personalizado, este sobrescribirá dicho firmware y romperá la comunicación con RoboPilot. Siga 3. Actualizar el Firmware de la Placa R3 para restaurarlo.
¿El interruptor de modo está en Run? El interruptor de modo debe estar en Run (no Upload) para que el punto de acceso WiFi funcione.
¿Su dispositivo móvil está en la red WiFi correcta? Conéctese al punto de acceso de GalaxyRVR (
GalaxyRVR/12345678), o si configuró una WiFi doméstica, conéctese a esa misma red.Intente reiniciar: Cambie al modo Run y pulse el botón Reset, luego intente conectar de nuevo.
Si nada de lo anterior funciona, pruebe con 12. ¿Cómo restaurar los ajustes de fábrica del ESP32 CAM?.
5. ¿La aplicación Mammoth Coding (Scratch) no puede conectar?
Si Mammoth Coding no puede conectarse a su GalaxyRVR, compruebe lo siguiente:
¿Está actualizado el firmware del ESP32 CAM? El ESP32 CAM gestiona la conexión WiFi de la que depende Mammoth Coding. Siga 2. Actualizar el Firmware de la ESP32 CAM para asegurarse de que está actualizado.
¿Está actualizado el firmware de la R3? Mammoth Coding requiere el firmware de comunicación de fábrica en la placa R3. Si ha cargado su propio código Arduino, el firmware de comunicación se sobrescribe. Siga 3. Actualizar el Firmware de la Placa R3 para restaurarlo.
¿El interruptor de modo está en Run? El interruptor de modo debe estar en Run para que el punto de acceso WiFi esté activo.
¿Su dispositivo móvil está en la red WiFi correcta? Asegúrese de que su dispositivo esté conectado al punto de acceso de GalaxyRVR o a la misma red WiFi doméstica configurada en el rover.
Nota
Si desea utilizar tanto la programación Arduino como Mammoth Coding, tenga en cuenta que deberá volver a cargar el firmware de la R3 cada vez que cambie entre ellos.
6. Error de compilación: SoftPWM.h o SunFounder_AI_Camera.h: No such file or directory?
Si aparece el mensaje «Error de compilación: SoftPWM.h: No such file or directory», significa que no tiene instalada la librería SoftPWM.
Instale las dos librerías necesarias SoftPWM y SunFounder AI Camera como se muestra a continuación.
Para la librería SunFounder AI Camera, debe seleccionar «INSTALL ALL» para instalar simultáneamente la dependencia ArduinoJson necesaria.

7. avrdude: stk500_getsync() attempt 10 of 10: not in sync: resp=0x6e?
Si el siguiente mensaje sigue apareciendo después de hacer clic en el botón Upload cuando la placa y el puerto se han seleccionado correctamente.
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 1 of 10: not in sync: resp=0x00
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 2 of 10: not in sync: resp=0x00
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 3 of 10: not in sync: resp=0x00
En este punto, debe asegurarse de que el ESP32 CAM está desconectado.
El ESP32-CAM y la placa Arduino comparten los mismos pines RX (recepción) y TX (transmisión). Por lo tanto, antes de cargar el código, primero debe desconectar el ESP32-CAM para evitar conflictos o posibles problemas.

Después de que el código se haya cargado correctamente, si necesita usar el ESP32 CAM, debe mover el interruptor hacia la izquierda para iniciar el ESP32 CAM.
8. ¿Cómo cambiar el canal WiFi?
La banda WiFi de 2.4 GHz tiene canales del 1 al 13. El ESP32 admite los canales 1 al 11. Otros dispositivos que operen en el mismo canal pueden causar interferencias, lo que provoca problemas de conexión. Para mitigarlo, puede intentar cambiar el canal. De forma predeterminada, el canal está configurado en 1. Al seleccionar un nuevo canal, se recomienda saltarse 1 o 2 canales a la vez. Por ejemplo, si el canal actual es el 1, pruebe primero con el canal 3 y, si la señal sigue siendo deficiente, pase al canal 5.
Encienda el GalaxyRVR. Para activar el ESP32 CAM, mueva el interruptor de modo a la posición Run y pulse el botón Reset para reiniciar la placa R3.
Conecte su dispositivo móvil a la red WiFi de GalaxyRVR.
El nombre de la red (SSID) es
GalaxyRVRy la contraseña es12345678.Si aparece una advertencia que indica «Sin acceso a Internet», seleccione la opción «Mantener conexión».

Abra un navegador web en su dispositivo móvil y vaya a la dirección
http://192.168.4.1. Esto le llevará al portal de actualización de firmware del ESP32-CAM.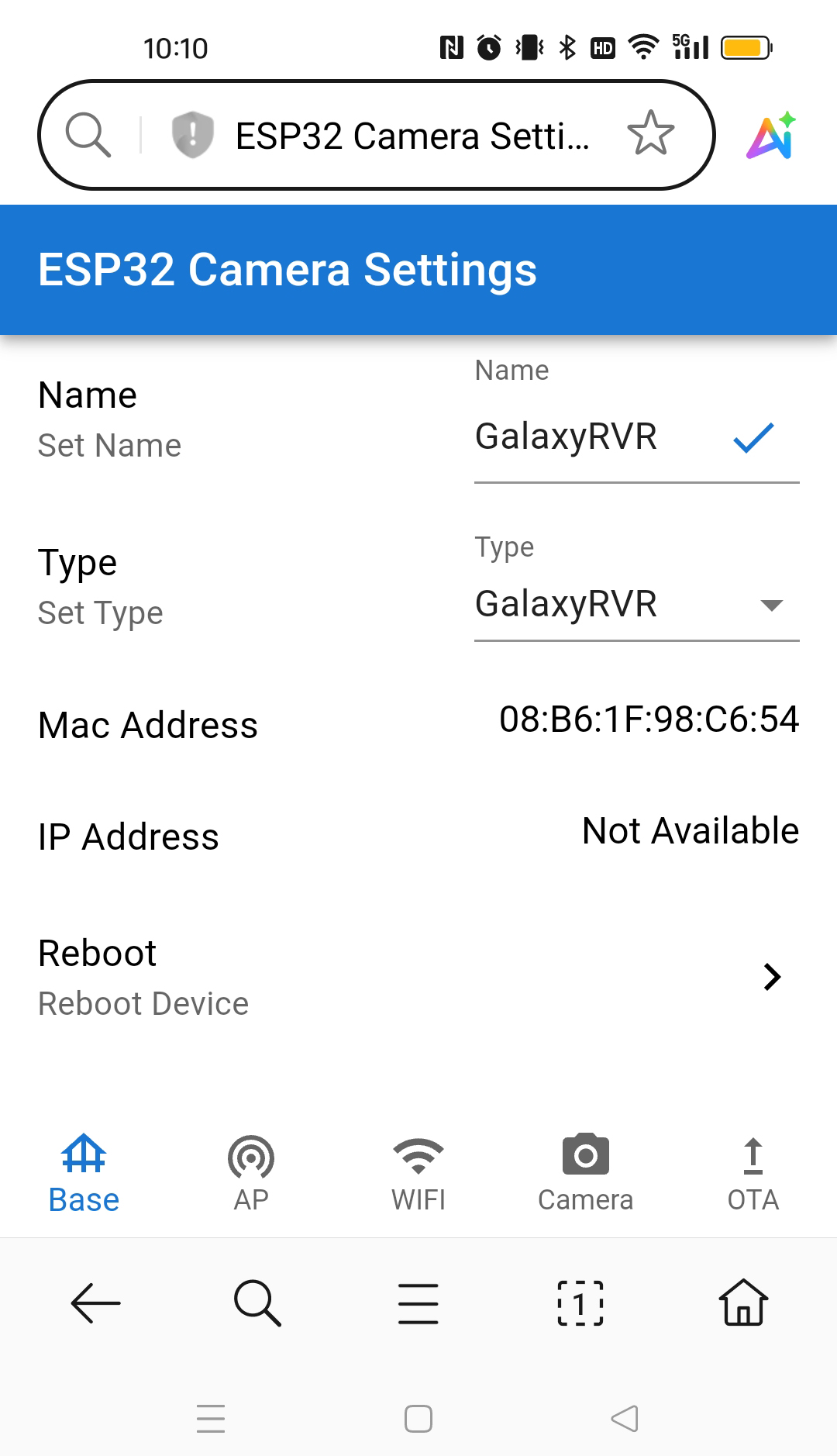
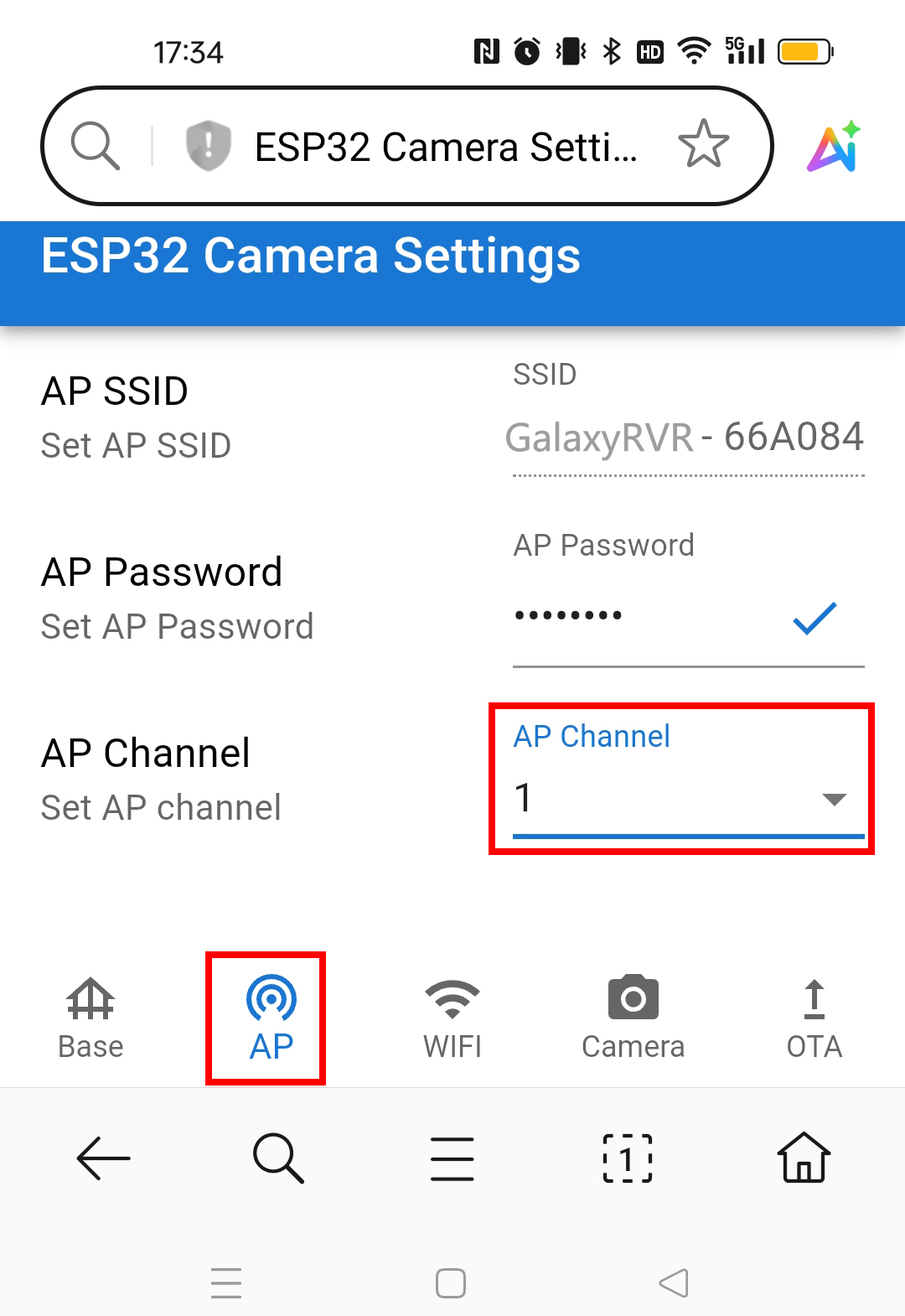
En la página AP, seleccione un canal diferente.
El canal predeterminado es el 1. Al seleccionar un nuevo canal, salte 1 o 2 canales a la vez (por ejemplo, del canal 1 al 3 y, si es necesario, al 5).
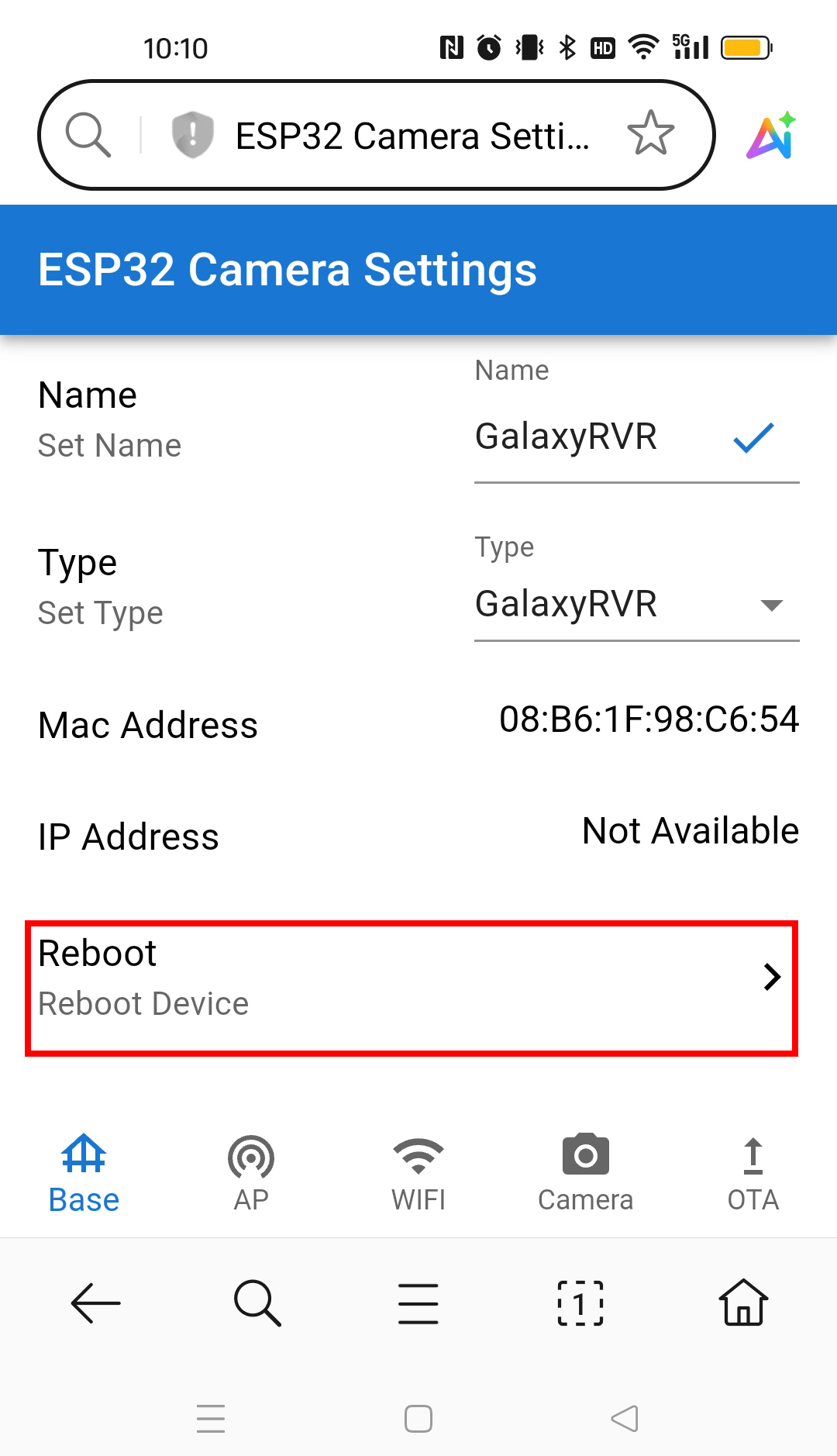
Vuelva a la página Base y haga clic en el botón Reboot para reiniciar el GalaxyRVR. El GalaxyRVR ya está listo para funcionar con normalidad.
9. Cómo actualizar el firmware del ESP32 CAM
Para garantizar la compatibilidad con las aplicaciones y un rendimiento óptimo, asegúrese de que el firmware de su ESP32 CAM esté actualizado.
Para obtener instrucciones detalladas paso a paso, consulte: 2. Actualizar el Firmware de la ESP32 CAM
10. Cómo restaurar el firmware de la placa R3
La placa R3 de GalaxyRVR viene con un firmware compatible tanto con la aplicación RoboPilot como con Mammoth Coding.
Si ha sobrescrito este firmware y necesita restaurar la comunicación, siga 3. Actualizar el Firmware de la Placa R3.
11. Cómo configurar la conexión WiFi
De forma predeterminada, GalaxyRVR funciona en modo AP, en el que crea su propio punto de acceso WiFi al que otros dispositivos pueden conectarse.
Si desea que GalaxyRVR se conecte a su red WiFi doméstica, siga los pasos que se indican a continuación:
Encienda el GalaxyRVR. Para activar el ESP32 CAM, mueva el interruptor de modo a la posición Run y pulse el botón Reset para reiniciar la placa R3.
Conecte su dispositivo móvil a la red WiFi de GalaxyRVR.
El nombre de la red (SSID) es
GalaxyRVRy la contraseña es12345678.Si aparece una advertencia que indica «Sin acceso a Internet», seleccione la opción «Mantener conexión».
Abra un navegador web en su dispositivo móvil y vaya a la dirección
http://192.168.4.1. Esto le llevará al portal de actualización de firmware del ESP32-CAM.
En la página WiFi, introduzca el nombre (SSID) y la contraseña de su red WiFi doméstica.
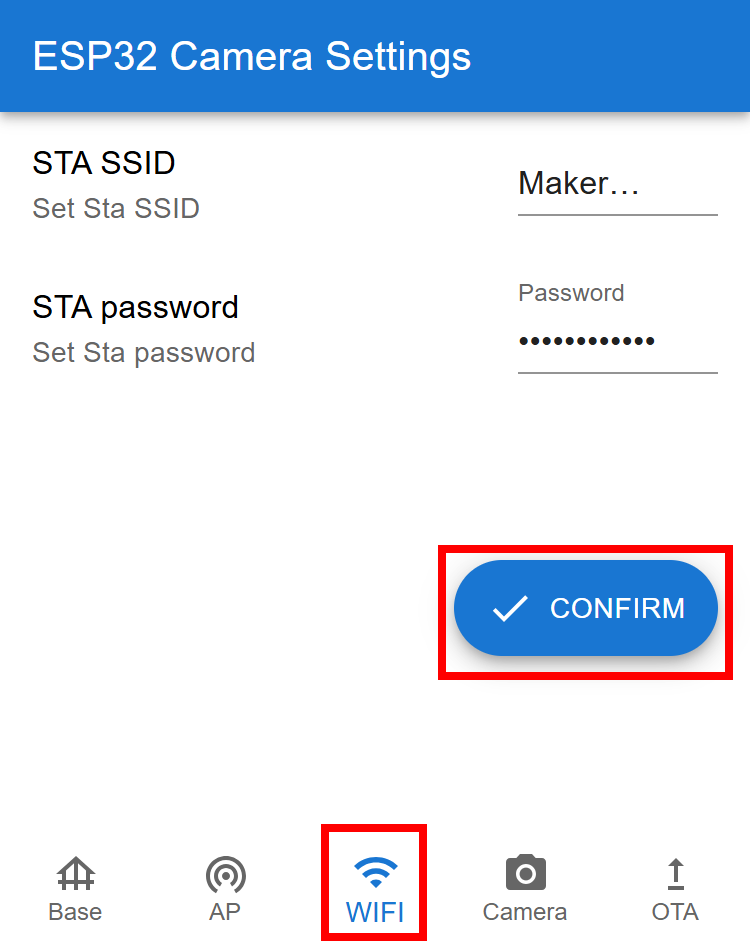
Pulse el botón CONFIRM.
GalaxyRVR intentará conectarse a su WiFi doméstica.
Si la conexión se realiza correctamente, el icono giratorio se detendrá y aparecerá una marca de verificación.
Después de reiniciar, conecte su dispositivo móvil a la misma red WiFi doméstica.
Ahora puede conectarse a GalaxyRVR a través de la aplicación RoboPilot o Mammoth Coding.
12. ¿Cómo restaurar los ajustes de fábrica del ESP32 CAM?
Si el punto de acceso WiFi de GalaxyRVR no aparece o no puede conectarse después de actualizar el firmware del ESP32 CAM, es posible que los datos antiguos de configuración WiFi almacenados en la memoria flash del ESP32 CAM estén causando un conflicto.
Para resolverlo, debe restaurar el ESP32 CAM a sus ajustes de fábrica borrando los datos almacenados. Esto se consigue puenteando los pines IO13 e IO15 del ESP32 CAM:
Apague el interruptor de alimentación de GalaxyRVR.
Localice los pines IO13 e IO15 en el módulo ESP32 CAM.
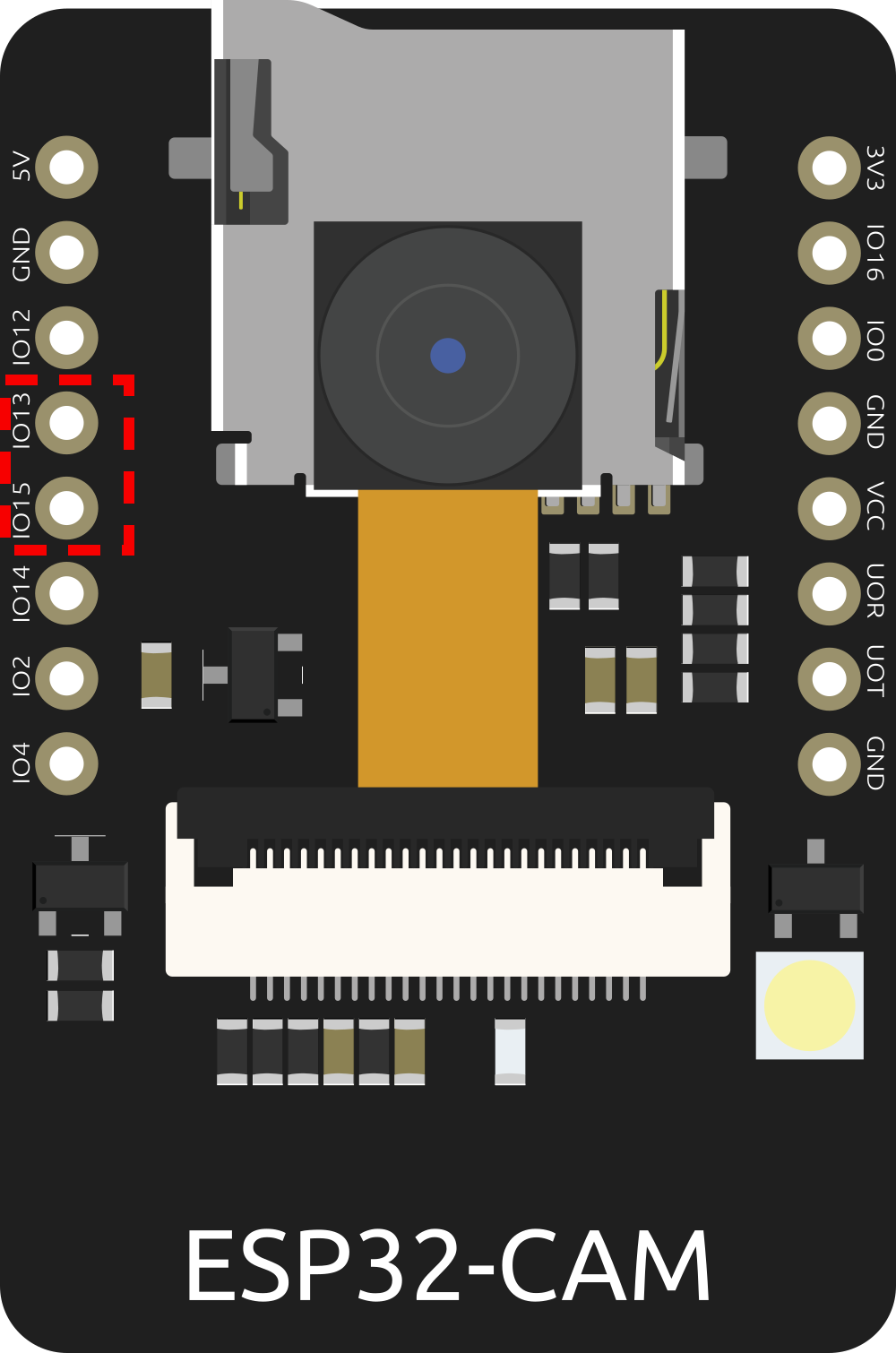
Use un cable puente o unas pinzas para puentear (conectar) los pines IO13 e IO15.
Manteniendo los pines puenteados, encienda el interruptor de alimentación de GalaxyRVR.
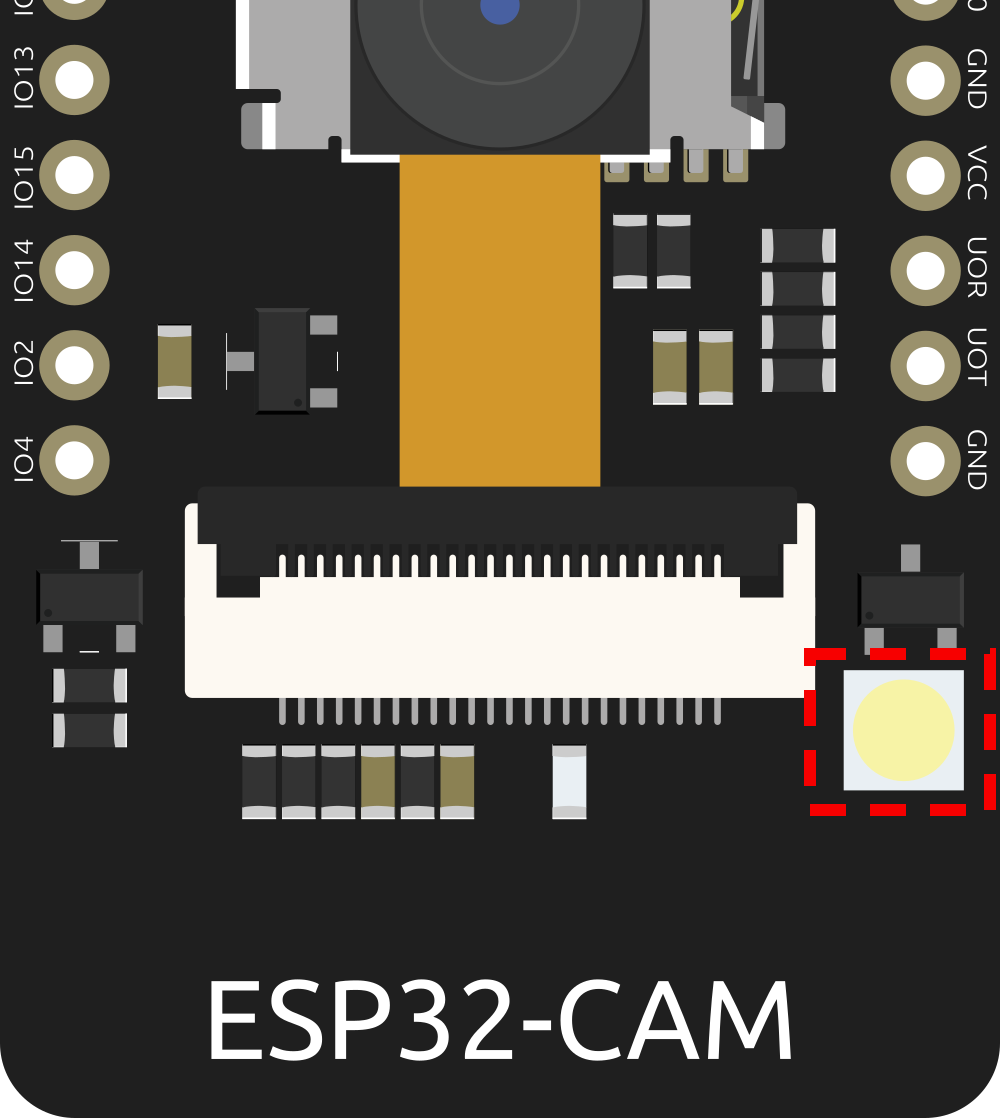
Observe el LED del ESP32 CAM; cuando parpadee dos veces rápidamente, retire el cable puente.
Cambie el modo a Run y pulse el botón Reset de la placa R3.
El ESP32 CAM se iniciará ahora con su configuración borrada. Debería ver un punto de acceso llamado
AI Camera-xxxxxx(dondexxxxxxes un identificador único) en la lista WiFi de su dispositivo. Conéctese usando la contraseña12345678.Después de reiniciar GalaxyRVR, el nombre del punto de acceso cambiará de
AI Camera-xxxxxxaGalaxyRVR-xxxxxx, lo que indica que los ajustes de fábrica se han restaurado correctamente.
Nota
Después de restaurar los ajustes de fábrica, deberá volver a configurar todos los ajustes de WiFi doméstica guardados previamente (11. Cómo configurar la conexión WiFi).