Nota
¡Hola, bienvenido a la comunidad de entusiastas de Raspberry Pi, Arduino y ESP32 de SunFounder en Facebook! Sumérgete en el mundo de Raspberry Pi, Arduino y ESP32 con otros entusiastas.
¿Por qué unirse?
Soporte experto: Resuelve problemas postventa y desafíos técnicos con la ayuda de nuestra comunidad y equipo.
Aprende y comparte: Intercambia consejos y tutoriales para mejorar tus habilidades.
Avances exclusivos: Accede antes a los anuncios de nuevos productos y avances exclusivos.
Descuentos especiales: Disfruta de descuentos exclusivos en nuestros productos más recientes.
Promociones festivas y sorteos: Participa en sorteos y promociones festivas.
👉 ¿Listo para explorar y crear con nosotros? ¡Haz clic en [aquí] y únete hoy!
Lección 6 Obstáculo IR
Conoce los «ojos» laterales de tu rover: ¡los sensores de evitación de obstáculos por infrarrojos!
Estos inteligentes sensores ayudan a tu GalaxyRVR a detectar y esquivar obstáculos a los lados, como si tuviera visión periférica. Aprende cómo funcionan y programa tu rover para navegar alrededor de objetos de forma automática.
Prepárate para convertir tu Mars Rover en un experto evadiendo obstáculos.
Objetivos de Aprendizaje
Comprender los principios de funcionamiento del módulo de evitación de obstáculos por infrarrojos y su aplicación en el Mars rover.
Aprender a leer y aplicar los datos del módulo de evitación de obstáculos por infrarrojos en Scratch.
Crear un juego de evitación de obstáculos con temática de exploración marciana utilizando el módulo IR y el escenario de Scratch.
Conoce el Módulo de Evitación de Obstáculos
Saluda al nuevo compañero de tu GalaxyRVR: el módulo de evitación de obstáculos por infrarrojos. Este pequeño y astuto dispositivo ayuda a tu rover a detectar y evitar obstáculos. Veamos cómo funciona:

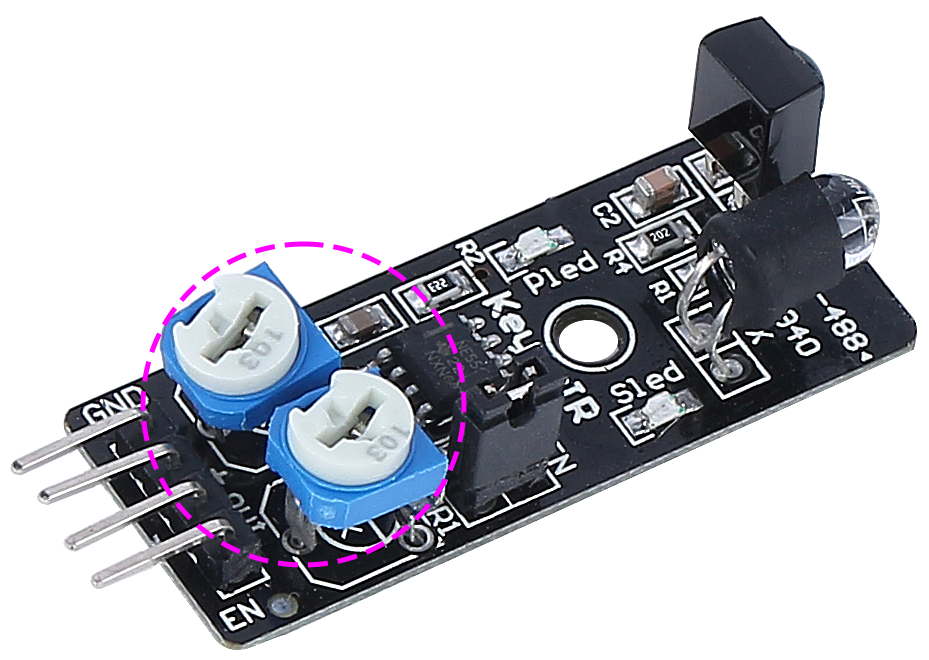
Conoce los Cuatro Pines Importantes:
GND —La conexión a tierra (completa el circuito)
+ —Entrada de alimentación (necesita electricidad de 3.3V a 5V)
Out —Salida de señal (envía mensajes de «obstáculo detectado»)
EN —Pin de habilitación (controla cuándo el módulo está activo)
Cómo Funciona —La Linterna Invisible:
Piensa en este módulo como si tuviera una linterna invisible y gafas especiales:
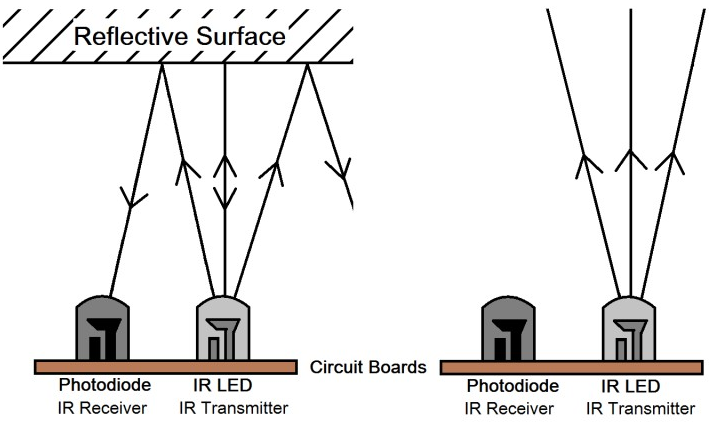
El transmisor emite luz infrarroja (invisible a nuestros ojos)
Cuando la luz golpea un obstáculo, rebota
El receptor «ve» la luz reflejada
El módulo envía una señal: «¡Obstáculo adelante!»
Datos Curiosos Sobre tu Sensor:
Rango de Detección: 2-40 cm (aproximadamente el largo de tu estuche de lápices)
El Color Importa: Funciona mejor con objetos de color claro
Objetos Oscuros: Más difíciles de detectar desde lejos
Controles Avanzados (Para Mentes Curiosas):
Pin EN: El puente (jumper) mantiene el módulo siempre activo. Retíralo si quieres controlar el módulo con código.

Dos Ajustes:
Un potenciómetro controla qué tan lejos viaja la luz infrarroja
Un potenciómetro ajusta la frecuencia de la luz
Ahora que conoces a tu nuevo compañero, conectémoslo a tu rover y comencemos a programar.
Probando tus Sensores Infrarrojos
Primero, Conectando la Aplicación a GalaxyRVR.
¡Ajustemos tus sensores para un rendimiento perfecto!
Asegúrate de que los componentes infrarrojos estén rectos. Ajusta suavemente si es necesario.
Coloca un objeto (como la caja de tu rover) a 20 cm. Gira el potenciómetro hasta que la luz indicadora se encienda. Prueba moviendo el objeto más cerca y más lejos.
Haz lo mismo con el otro módulo infrarrojo.
Busca los bloques «left IR status» y «right IR status» en la categoría GalaxyRVR y marca sus casillas.
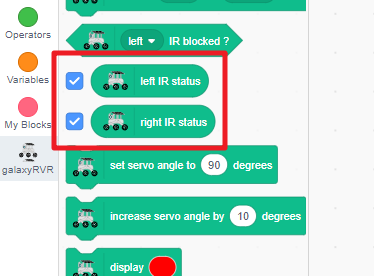
Los valores de los sensores aparecerán ahora en tu escenario.
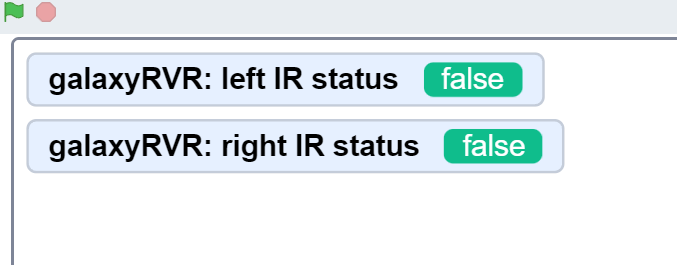
Mueve tu mano cerca de cada sensor infrarrojo y observa cómo cambian los valores.
Qué Significan los Valores:
True = Obstáculo detectado
False = Camino despejado
¡Ahora estás listo para ver lo que tu rover puede «ver»!
Programando tu Rover para Evitar Obstáculos
Enseñémosle a tu GalaxyRVR a esquivar obstáculos automáticamente usando sus sensores infrarrojos.
Primero, Conectando la Aplicación a GalaxyRVR.
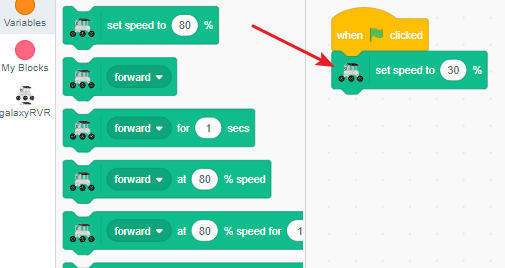
Inicia el programa con un bloque de bandera verde.

Establece una velocidad segura del 30% para facilitar las pruebas y la depuración.
Encuentra el bloque
when left IR is blockedpara la detección del sensor izquierdo.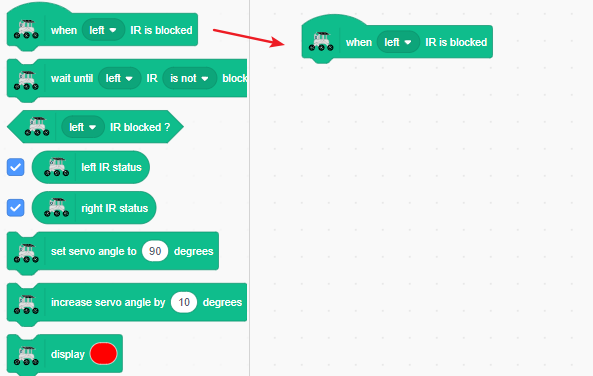
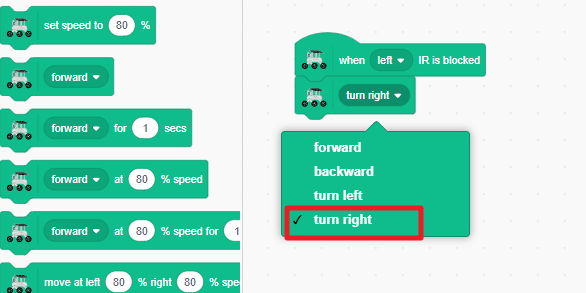
Cuando el sensor izquierdo detecte un obstáculo, haz que el rover gire a la derecha.
Sigue girando a la derecha hasta que el lado izquierdo ya no detecte el obstáculo.
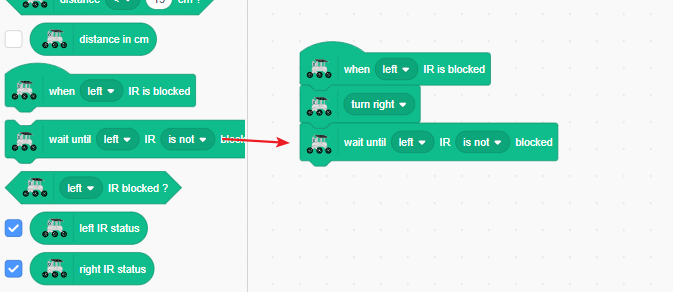
Detén el movimiento una vez que el camino esté despejado.
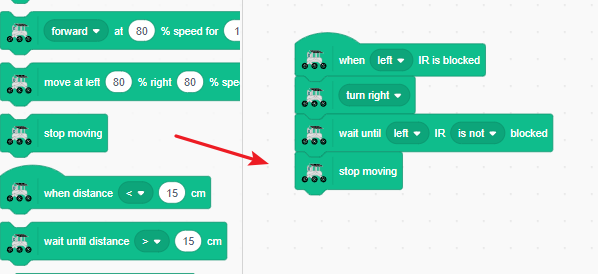
Prueba activando el sensor infrarrojo izquierdo con tu mano. El GalaxyRVR debería girar inteligentemente a la derecha para evitarlo.
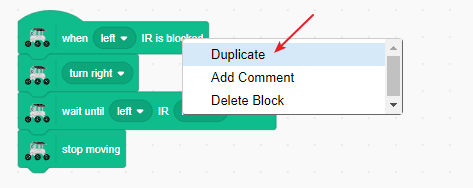
Duplica el código manteniendo presionados los bloques y seleccionando duplicar en el menú.
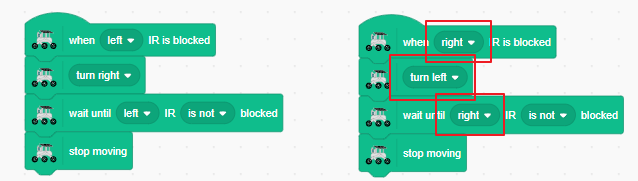
En el código duplicado, intercambia los lados izquierdo y derecho para que maneje los obstáculos del lado derecho.
Para evitar un comportamiento errático cuando ambos sensores se activan a la vez, agrega un bloque «stop other scripts in sprite». Esto asegura que solo se maneje un evento de sensor a la vez.
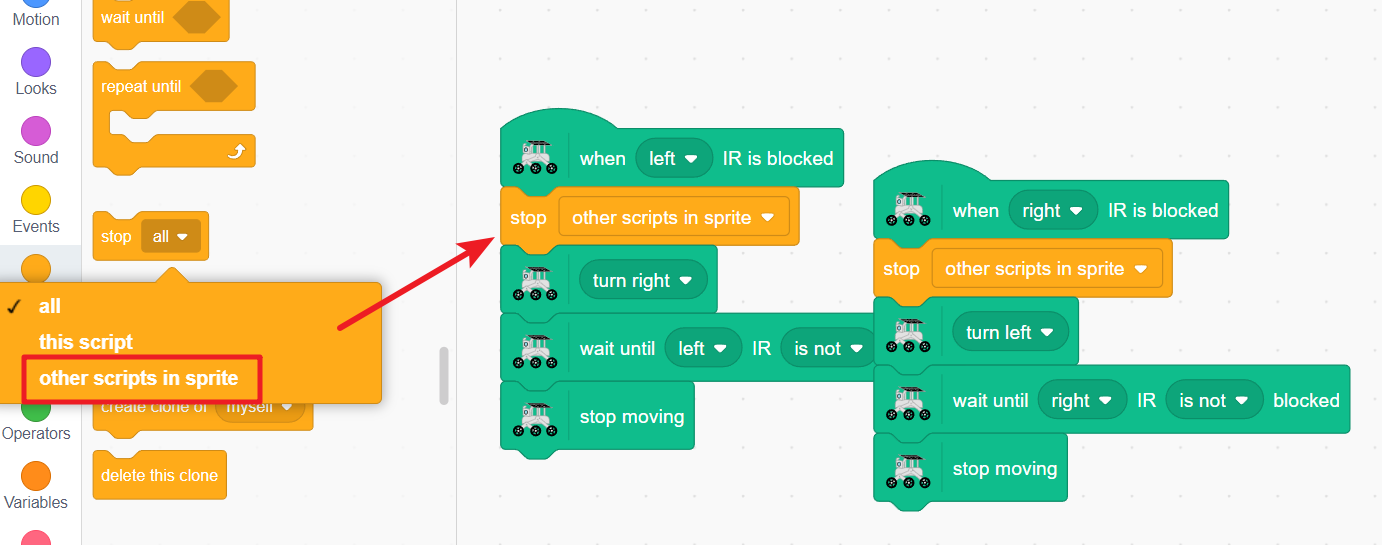
Nota
El bloque de detener scripts puede entrar en conflicto con los bloques de movimiento temporizado, así que evita usarlos juntos cuando sea posible.
Ahora tu GalaxyRVR girará a la izquierda o a la derecha cuando se detecten obstáculos en cualquier lado. Prueba activando ambos sensores con tus manos.
Agrega un bloque de avance debajo de cada sección de código para que el rover continúe moviéndose después de evitar los obstáculos.
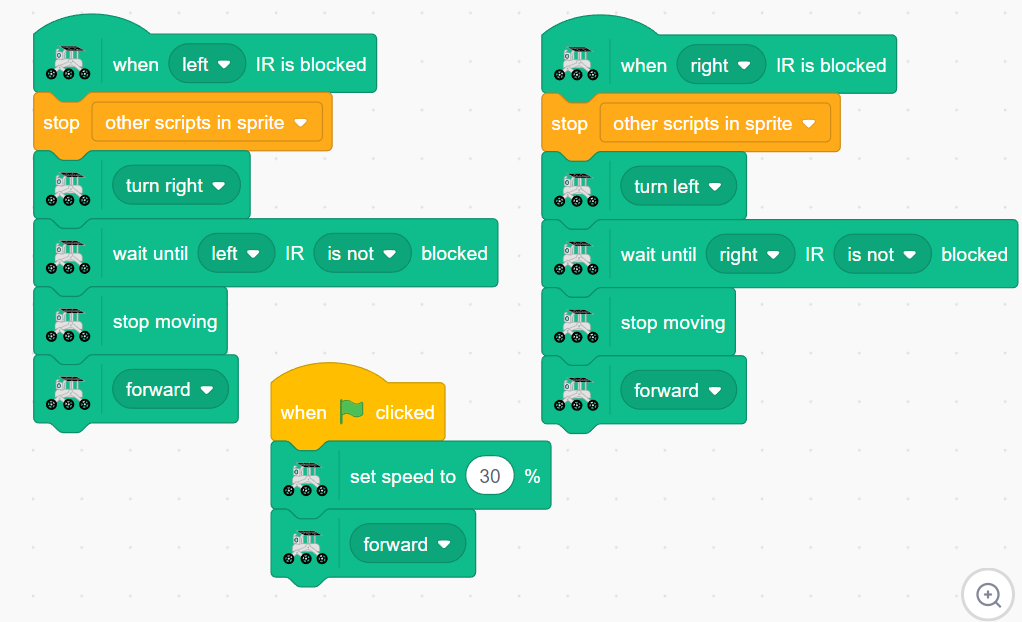
¡Ahora haz clic en la bandera verde! Tu GalaxyRVR se moverá hacia adelante continuamente, esquivando inteligentemente los obstáculos y reanudando su camino después de evitarlos.
Bloques Relacionados con el Módulo IR
Bloque de evento que se activa cuando el sensor IR izquierdo detecta un obstáculo.
Cambia «left» por «right» en el menú desplegable.

Pausa el programa hasta que el sensor IR izquierdo ya no detecte un obstáculo.
Cambia «left» por «right» para el otro sensor.
Cambia «is not» por «is» para la condición opuesta.

Bloque condicional que devuelve VERDADERO si el sensor IR izquierdo detecta un obstáculo.
Perfecto para usar con declaraciones
if.Cambia «left» por «right» para el otro sensor.

Muestra el estado de detección actual del sensor IR izquierdo.

Muestra el estado de detección actual del sensor IR derecho.
