Nota
¡Hola, bienvenido a la comunidad de entusiastas de Raspberry Pi, Arduino y ESP32 de SunFounder en Facebook! Sumérgete en el mundo de Raspberry Pi, Arduino y ESP32 con otros entusiastas.
¿Por qué unirse?
Soporte experto: Resuelve problemas postventa y desafíos técnicos con la ayuda de nuestra comunidad y equipo.
Aprende y comparte: Intercambia consejos y tutoriales para mejorar tus habilidades.
Avances exclusivos: Accede antes a los anuncios de nuevos productos y avances exclusivos.
Descuentos especiales: Disfruta de descuentos exclusivos en nuestros productos más recientes.
Promociones festivas y sorteos: Participa en sorteos y promociones festivas.
👉 ¿Listo para explorar y crear con nosotros? ¡Haz clic en [aquí] y únete hoy!
Lección 4: Módulo Ultrasónico
¡Dale a tu GalaxyRVR el poder de «ver» con sonido!
Descubre cómo los sensores ultrasónicos funcionan como la ecolocalización de los murciélagos: emitiendo ondas sonoras y escuchando los ecos para detectar obstáculos y medir distancias.
¡Haz que tu Mars Rover sea más inteligente y seguro mientras explora!
Objetivos de Aprendizaje
Descubrir cómo los sensores ultrasónicos utilizan ondas sonoras para medir distancia
Aprender a leer mediciones de distancia usando la aplicación Mammoth Coding
Programar tu GalaxyRVR para evitar obstáculos usando el sensor ultrasónico
Explorando el Módulo Ultrasónico
Conoce el sensor ultrasónico HC-SR04: el nuevo «superpoder» de tu rover para ver distancias sin tocar nada. Al igual que los murciélagos usan el sonido para navegar, este inteligente dispositivo puede detectar objetos desde 2 cm hasta 400 cm de distancia.

Conoce los Cuatro Pines Importantes:
TRIG - El «botón de inicio» que le dice al sensor que envíe ondas sonoras
ECHO - Escucha el eco que regresa de los objetos
VCC - Conexión de alimentación (necesita electricidad de 5V)
GND - Conexión a tierra (completa el circuito)
Cómo Funciona - El Juego del Eco:
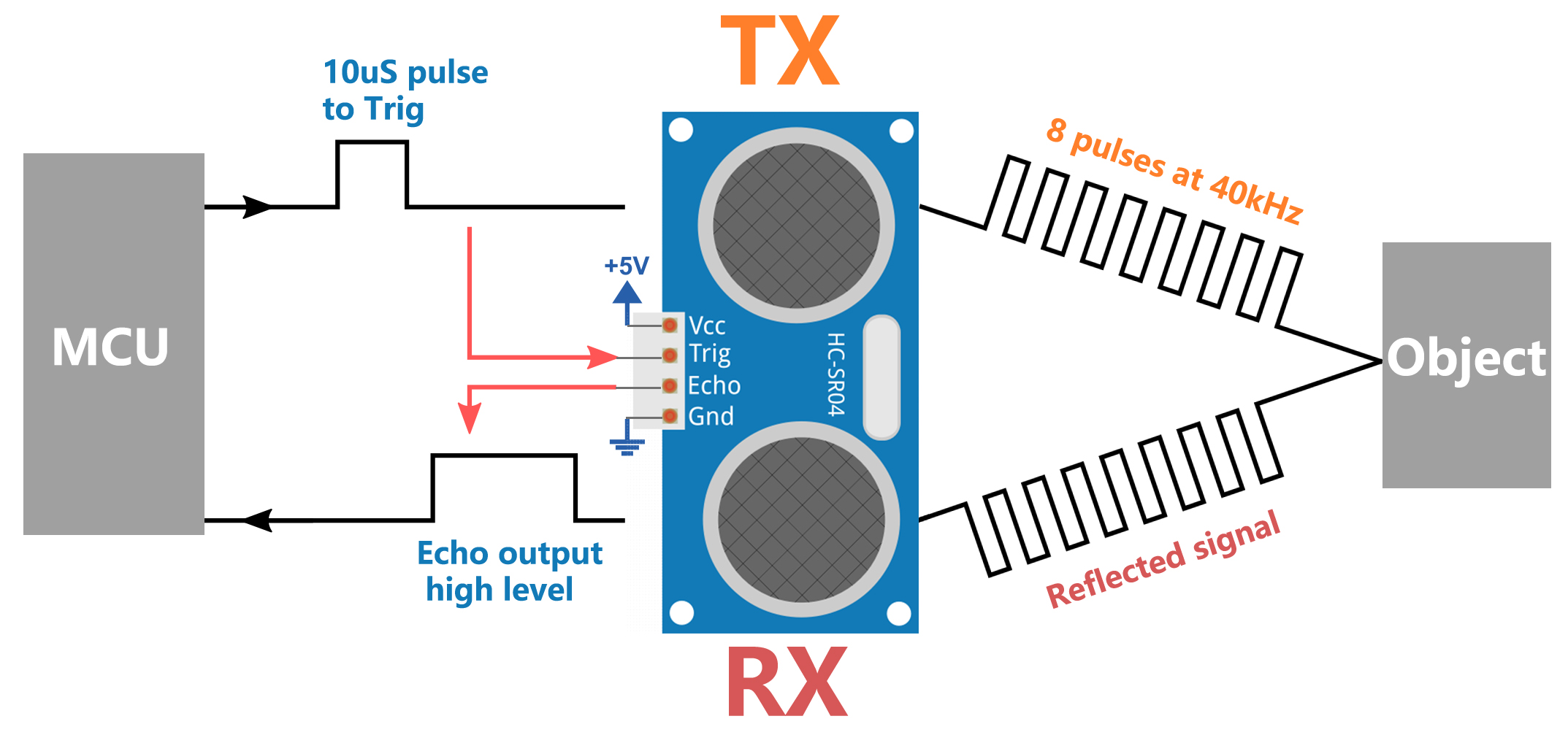
INICIO - El sensor envía 8 ondas sonoras rápidas (demasiado agudas para que las escuchemos)
ESCUCHA - Comienza a cronometrar y espera a que el eco regrese
CALCULA - Usando el tiempo del eco, calcula: Distancia = (Tiempo x Velocidad del Sonido) / 2
Piénsalo como gritar en un cañón y contar cuánto tarda en escuchar tu eco. Cuanto más espere, más lejos está la pared.
Ahora dale a tu Mars Rover este increíble superpoder.
Probando el Sensor Ultrasónico
Primero, Conectando la Aplicación a GalaxyRVR.
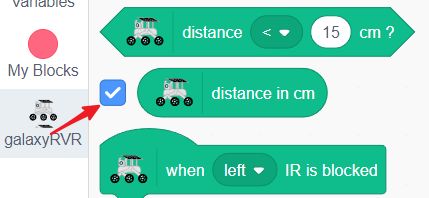
Encuentra el bloque «distance in cm» en la categoría GalaxyRVR y marca su casilla.
La lectura del sensor se mostrará ahora en vivo en el escenario.
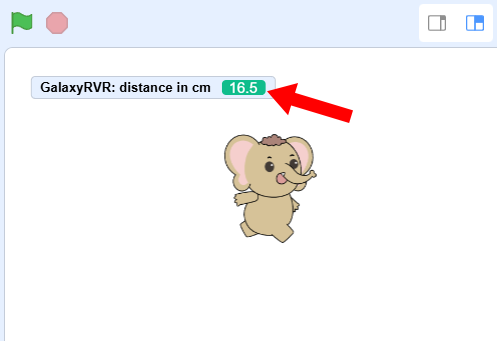
Agita tu mano frente al sensor ultrasónico y observa cómo cambia el número: está midiendo la distancia en centímetros.
Creando un Rover que Evita Obstáculos
Programemos tu GalaxyRVR para que evite obstáculos automáticamente usando el sensor ultrasónico.
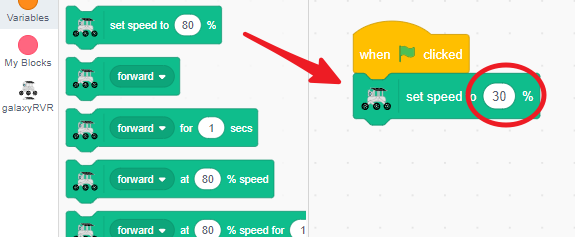
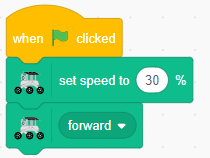
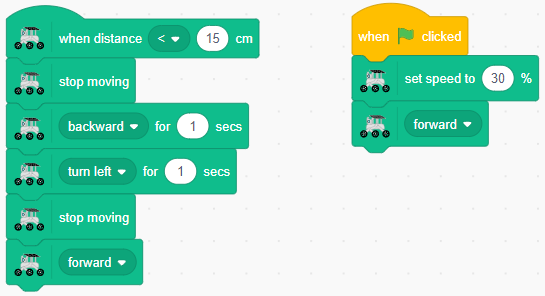
Comienza con el bloque de bandera verde.

Establece una velocidad cómoda (recomendamos 30%) para las pruebas.
Agrega un bloque «move forward» para que el rover siga avanzando cuando el camino esté despejado.
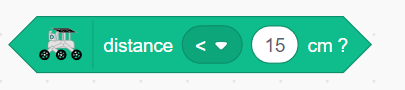
Usa el bloque
when distance < 15 cmpara detectar obstáculos cercanos.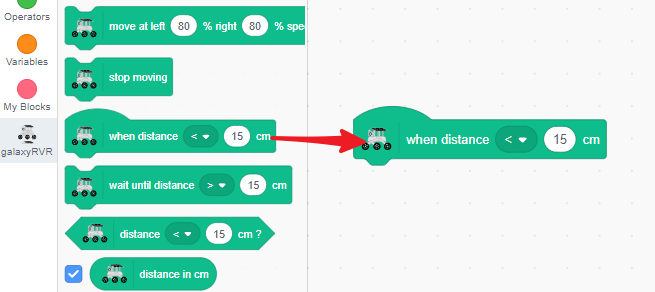
Cuando algo se acerque demasiado, haz que el rover se detenga y retroceda.
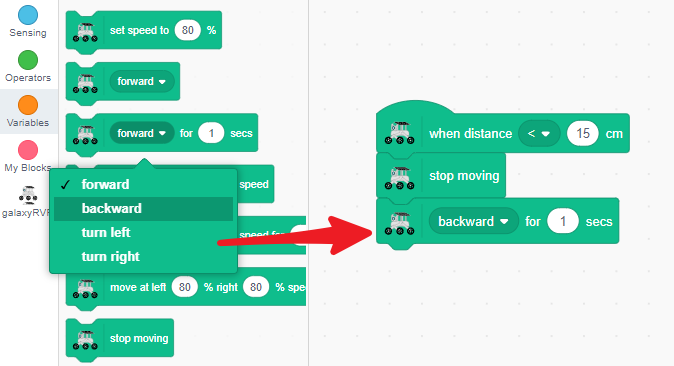
Luego haz que gire ligeramente (izquierda o derecha, tu elección).
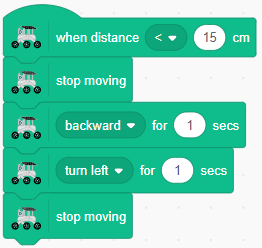
Finalmente, dile que avance nuevamente en su nuevo camino.
Ahora coloca tu GalaxyRVR en el suelo y mira cómo se mueve. Avanzará hasta que detecte un obstáculo, luego cambiará inteligentemente de dirección y continuará explorando.
Bloques del Sensor Ultrasónico
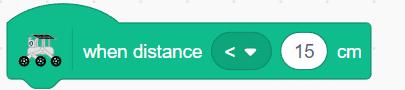
Bloque de Disparo de Evento
Inicia el código cuando se detecta un objeto dentro de una distancia establecida.
Cambia el símbolo de comparación (< o >)
Ajusta el umbral de distancia (en cm)
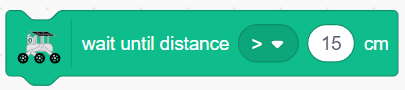
Bloque de Espera Hasta
Pausa tu programa hasta que el sensor detecte un objeto a la distancia especificada.
Elige < o > para la comparación de distancia
Establece el valor de distancia deseado
Bloque de Verificación de Condición
Devuelve VERDADERO o FALSO según la detección de distancia. Perfecto para usar con instrucciones
if.Cambia entre < y > según sea necesario
Establece el límite de distancia
Bloque de Valor de Distancia
Muestra la lectura actual de distancia del sensor ultrasónico en centímetros.