Nota
¡Hola, bienvenido a la comunidad de entusiastas de Raspberry Pi, Arduino y ESP32 de SunFounder en Facebook! Sumérgete en el mundo de Raspberry Pi, Arduino y ESP32 con otros entusiastas.
¿Por qué unirse?
Soporte experto: Resuelve problemas postventa y desafíos técnicos con la ayuda de nuestra comunidad y equipo.
Aprende y comparte: Intercambia consejos y tutoriales para mejorar tus habilidades.
Avances exclusivos: Accede antes a los anuncios de nuevos productos y avances exclusivos.
Descuentos especiales: Disfruta de descuentos exclusivos en nuestros productos más recientes.
Promociones festivas y sorteos: Participa en sorteos y promociones festivas.
👉 ¿Listo para explorar y crear con nosotros? ¡Haz clic en [aquí] y únete hoy!
Lección 11: Controla la Inclinación de la Cámara de tu Rover
¡Dale a tu Rover Marciano una cámara que se mueva! Así como puedes mover la cabeza hacia arriba y hacia abajo, tu rover ahora puede inclinar su cámara para explorar el paisaje marciano desde diferentes ángulos.
Usaremos un motor especial llamado «servo» que puede moverse a posiciones exactas, perfecto para controlar la inclinación de la cámara de tu rover. Aprende a programar el servo para mirar hacia las montañas marcianas o hacia abajo a las rocas interesantes.
Objetivos de Aprendizaje
Descubrir cómo funcionan los servos
Aprender a controlar los ángulos de la cámara usando bloques de código simples
Crear proyectos interactivos que te permitan inclinar la cámara con controles táctiles
¿Qué es un Servo?
¡Conoce al servo, el músculo móvil de tu robot!
Así como puedes mover tu brazo exactamente a la posición correcta, un servo motor puede moverse a ángulos específicos y mantenerlos perfectamente. Piensa en él como un motor inteligente que sabe exactamente dónde detenerse.

Conexiones simples:
Cable marrón: Tierra (-)
Cable rojo: Alimentación (+)
Cable naranja: Señal (le dice al servo hacia dónde moverse)
En tu Rover Marciano, el servo actúa como una cabeza que asiente, moviendo la cámara hacia arriba y hacia abajo para capturar la vista perfecta.
¿Cómo Funciona un Servo?
Dentro de cada servo, hay un equipo inteligente trabajando en conjunto:
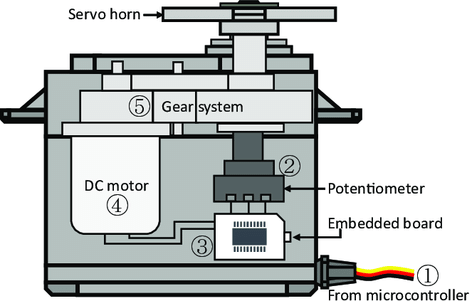
Motor normal - Gira rápido como las ruedas de tu rover
Engranajes - Reducen el movimiento y lo hacen más fuerte
Circuito cerebral - Sabe exactamente en qué posición está el servo
Sensor de posición - Informa hacia dónde apunta el servo
Controlamos los servos usando señales especiales que dicen «¡muévete a este ángulo exacto!» Es como decirle a un amigo exactamente cuánto debe girar la cabeza.
¿Listo para hacer bailar a tu servo? ¡Empecemos a programar!
Controla el Sistema de Inclinación de tu Rover
Aprendamos a controlar el sistema de inclinación de tu Rover Marciano, la parte que mueve la cámara hacia arriba y hacia abajo como una cabeza que asiente.
Configuración del Ángulo de la Cámara
Primero, Conectando la Aplicación a GalaxyRVR.
Verifica el ángulo actual del servo; lo verás mostrado en el escenario.
Arrastra un bloque
set servo angle to 90 degrees. Haz clic en él para que tu rover mire hacia adelante.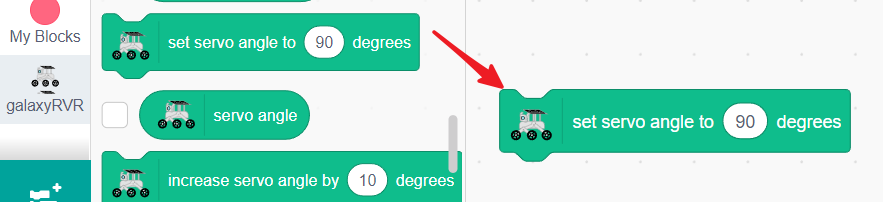
Cambia el valor a 45 y haz clic; ahora tu rover mira hacia el cielo marciano.

¡Experimenta con diferentes ángulos! Descubrirás que tu rover puede inclinarse entre 0 y 135 grados.
Creación de Controles de Cámara
Construyamos un panel de control para la cámara de tu rover:
Crea un botón de reinicio: arrastra un bloque
when this sprite clicked.
Agrega
set servo angle to 90 degreespara que la cámara mire hacia adelante nuevamente.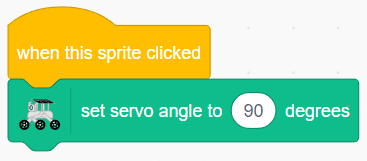
Agrega controles arriba/abajo: arrastra los bloques
when up arrow key pressedywhen down arrow key pressed.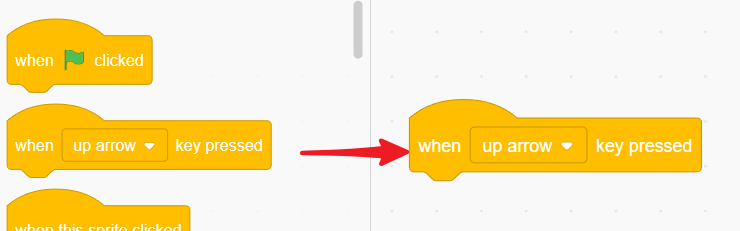
Programa la flecha arriba para disminuir el ángulo (mirar hacia arriba).
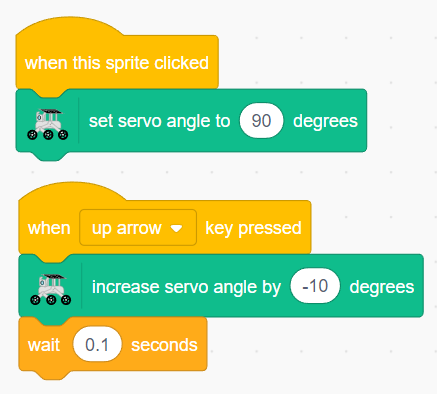
Programa la flecha abajo para aumentar el ángulo (mirar hacia abajo).
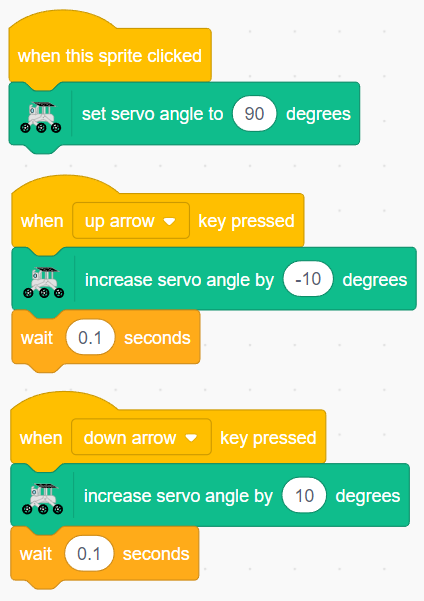
Ahora haz clic en el botón de pantalla completa y toma el control. Usa las teclas de flecha para ajustar la vista de tu rover y haz clic en el sprite para reiniciar. ¡Eres el operador de cámara!
Control Táctil para el Ángulo de la Cámara
¡Crea una cámara controlada por tacto! Arrastra una flecha para apuntar la cámara de tu rover exactamente hacia donde quieras.
Limpia el escenario eliminando cualquier sprite existente.
Agrega un sprite de Flecha para usarlo como control táctil.
Comienza con
when this sprite clickedpara iniciar el control táctil.
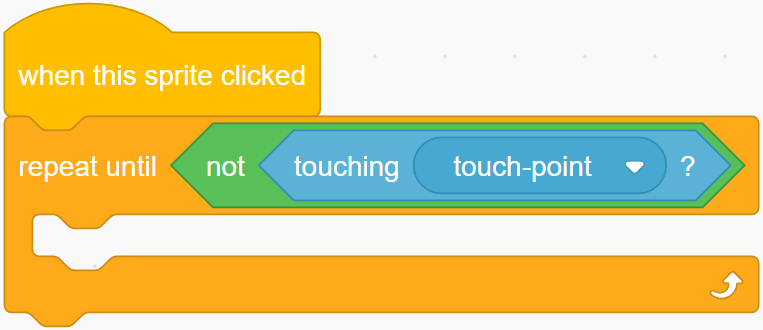
Crea un bucle que se ejecute mientras estés tocando la flecha.
Haz que la flecha apunte hacia tu dedo mientras arrastras.
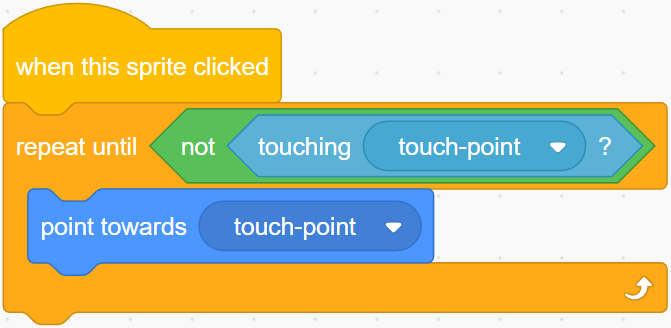
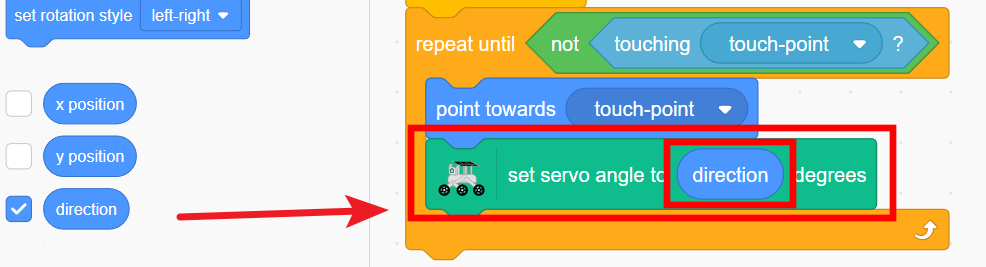
Vincula la dirección de la flecha con el ángulo de la cámara: ¡gira la flecha, mueve la cámara!
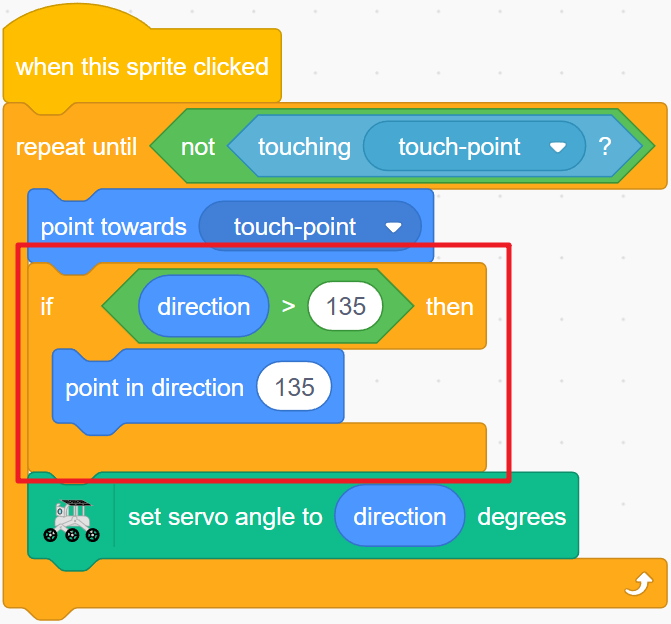
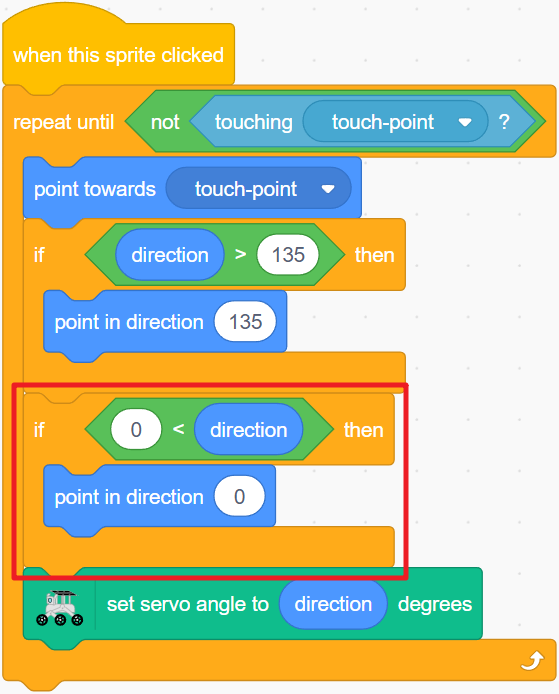
Establece límites para mantener la cámara entre 0 y 135 grados.
Toca y arrastra la flecha para apuntar la cámara de tu rover. Haz que la flecha se mueva suavemente y responda instantáneamente a tu tacto para una sensación de control realista.
Bloques de Control del Servo
Establece el servo en un ángulo específico (0-135 grados)

Aumenta o disminuye el ángulo del servo (usa números negativos para disminuir)

Verifica el ángulo actual del servo
