Bemerkung
Hallo und willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Gemeinschaft auf Facebook! Tauchen Sie tiefer ein in die Welt von Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten.
Warum beitreten?
Expertenunterstützung: Lösen Sie Nachverkaufsprobleme und technische Herausforderungen mit Hilfe unserer Gemeinschaft und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Anleitungen aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und exklusiven Einblicken.
Spezialrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Sind Sie bereit, mit uns zu erkunden und zu erschaffen? Klicken Sie auf [hier] und treten Sie heute bei!
Lektion 9: Mars-Erkundungspartner
Nachdem unser Rover nun geschickt Hindernisse vermeiden kann, bringen wir ihm einen neuen Trick bei – das Verfolgen eines Ziels! In dieser Mission verwandeln wir unseren hindernisvermeidenden Rover in einen treuen Begleiter, der Ihnen folgen kann.
Was ist der Unterschied zwischen Vermeiden und Folgen?
Vermeiden: Von Objekten wegsteuern (wie das Ausweichen vor Steinen)
Folgen: Sich auf Objekte zubewegen (wie das Folgen eines Freundes)
Machen Sie sich bereit, Ihren eigenen Mars-Erkundungsbegleiter zu programmieren!
Lernziele
Kombinieren von Ultraschall- und Infrarotsensoren zur Entwicklung eines Folge-Rovers
Programmieren Sie Ihren Mars Rover so, dass er ein sich bewegendes Ziel automatisch erfasst und verfolgt
Ihren Folge-Rover erstellen
Zunächst: Verbinden der App mit dem GalaxyRVR.
Öffnen Sie nun Ihr gespeichertes Projekt aus Lektion 8.
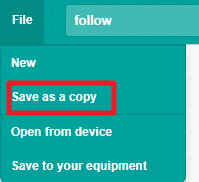
Speichern Sie eine Kopie, um Ihr ursprüngliches Projekt zu sichern. Klicken Sie auf „Als Kopie speichern“.
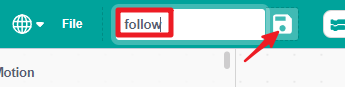
Geben Sie Ihrem neuen Projekt einen lustigen Namen wie „Mars Follower“ oder „Rover Buddy“.
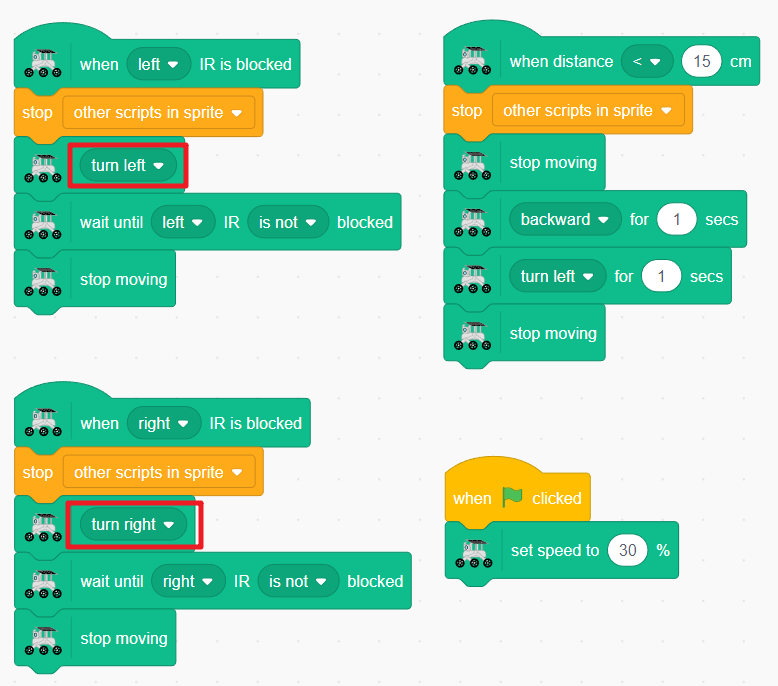
Entfernen Sie die „move forward“-Blöcke am Ende jedes Sensor-Ereignisses. Unser Folgerover sollte nach jeder Aktion anhalten und warten.
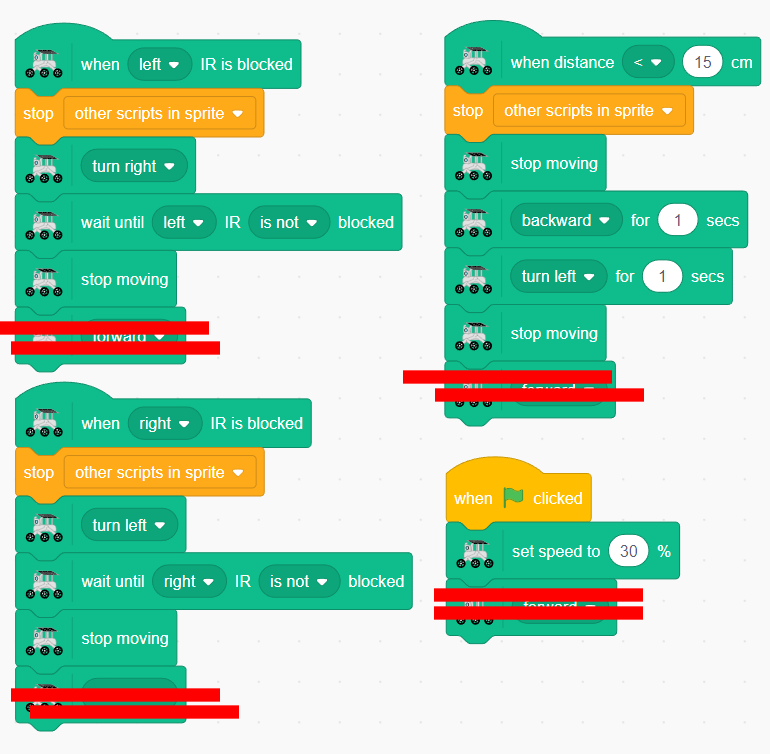
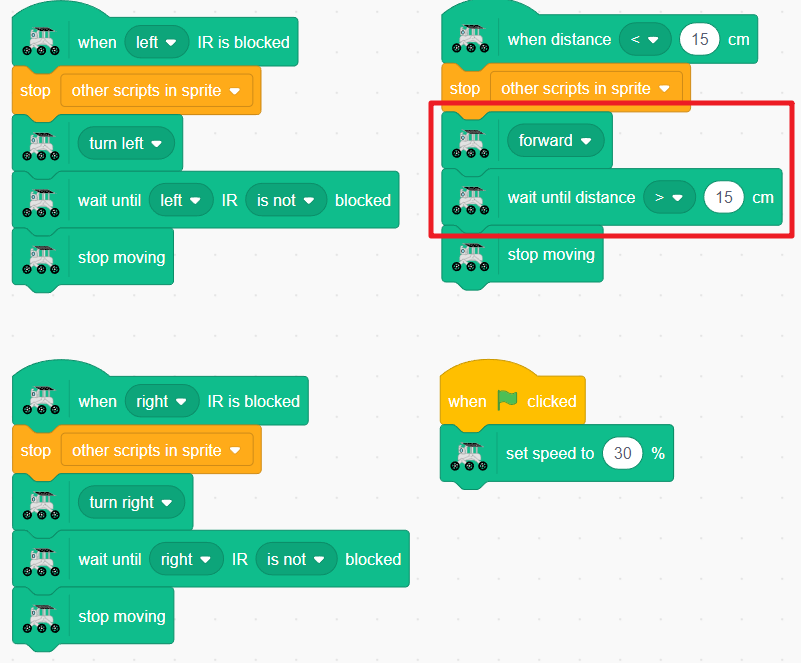
Programmieren wir nun die IR-Sensoren neu! Ändern Sie die Drehrichtungen so, dass der Rover sich AUF das Ziel zudreht, anstatt sich davon wegzudrehen.
Aktualisieren Sie schließlich das Verhalten des Ultraschallsensors. Anstatt zurückzusetzen, lassen Sie ihn sich VORWÄRTS bewegen, wenn er ein Ziel vor sich erkennt.
Fantastisch! Ihr GalaxyRVR ist jetzt Ihr Mars-Erkundungspartner. Testen Sie es aus:
Gehen Sie daneben → er dreht sich zu Ihnen
Stellen Sie sich davor → er bewegt sich auf Sie zu
Entfernen Sie sich → er hält an und wartet
Ihr Rover-Begleiter ist bereit, Ihnen auf Ihr nächstes Weltraumabenteuer zu folgen!