Bemerkung
Hallo und willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Gemeinschaft auf Facebook! Tauchen Sie tiefer ein in die Welt von Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten.
Warum beitreten?
Expertenunterstützung: Lösen Sie Nachverkaufsprobleme und technische Herausforderungen mit Hilfe unserer Gemeinschaft und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Anleitungen aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und exklusiven Einblicken.
Spezialrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Sind Sie bereit, mit uns zu erkunden und zu erschaffen? Klicken Sie auf [hier] und treten Sie heute bei!
Lektion 8: Erweiterte Hindernisvermeidung
Haben Sie sich schon einmal gefragt, wie Roboter sich in Räumen bewegen können, ohne gegen Möbel zu stoßen? Heute bringen wir unserem Mars Rover genau das bei! Wir kombinieren zwei verschiedene Sensortypen, um ein superintelligentes Hindernisvermeidungssystem zu entwickeln.
Wie Sensoren Robotern helfen zu „sehen“
Denken wir darüber nach, wie wir unsere Sinne einsetzen:
Infrarotsensoren funktionieren wie Fledermäuse mit Echoortung! Sie senden unsichtbares Infrarotlicht aus und warten darauf, dass es von Objekten zurückgeworfen wird. Wenn das Licht schnell zurückkommt, befindet sich ein Hindernis in der Nähe.
Ultraschallsensoren arbeiten mit Schallwellen, die wir nicht hören können. Sie senden hochfrequente Schallwellen aus und messen, wie lange es dauert, bis das Echo zurückkommt. Eine längere Zeit bedeutet, dass das Objekt weiter entfernt ist.
Wenn wir beide Sensoren zusammen verwenden, erhält unser Rover ein viel besseres Verständnis seiner Umgebung – genau wie wenn Sie Ihre Augen und Ohren benutzen, um sich in einem dunklen Raum zurechtzufinden!
Lernziele
Kombinieren von Ultraschall- und Infrarotsensoren zur Entwicklung eines erweiterten Hindernisvermeidungssystems
Programmieren Sie Ihren Mars Rover so, dass er Hindernisse automatisch erkennt und umfährt
Unser superintelligentes Rover-System aufbauen
Erinnern Sie sich an das Hindernisvermeidungsprogramm, das wir zuvor erstellt haben? Wir werden es als Ausgangspunkt nutzen und noch besser machen!
Zunächst: Verbinden der App mit dem GalaxyRVR.
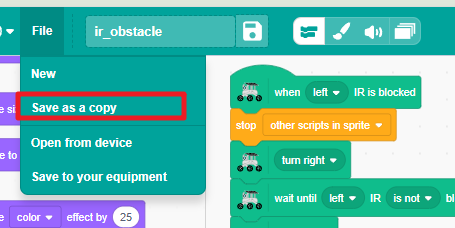
Öffnen Sie nun unser vorheriges Infrarotsensor-Projekt aus Lektion 6: IR-Hindernisvermeidung als Vorlage. Klicken Sie auf „Datei“ und suchen Sie Ihr gespeichertes IR-Hindernisvermeidungsprojekt.
Bevor wir Änderungen vornehmen, speichern wir eine Kopie, damit wir unsere ursprüngliche Arbeit nicht verlieren. Klicken Sie auf „Als Kopie speichern“.
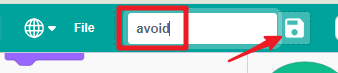
Geben Sie Ihrem neuen Projekt einen coolen Namen wie „Super Smart Rover“ oder „Advanced Obstacle Avoidance“.
Fügen wir nun unseren Ultraschallsensor hinzu! Ziehen Sie den Block
when distance < 15 cmheraus. Dies wird unser „Frühwarnsystem“ sein, das Hindernisse aus größerer Entfernung erkennt.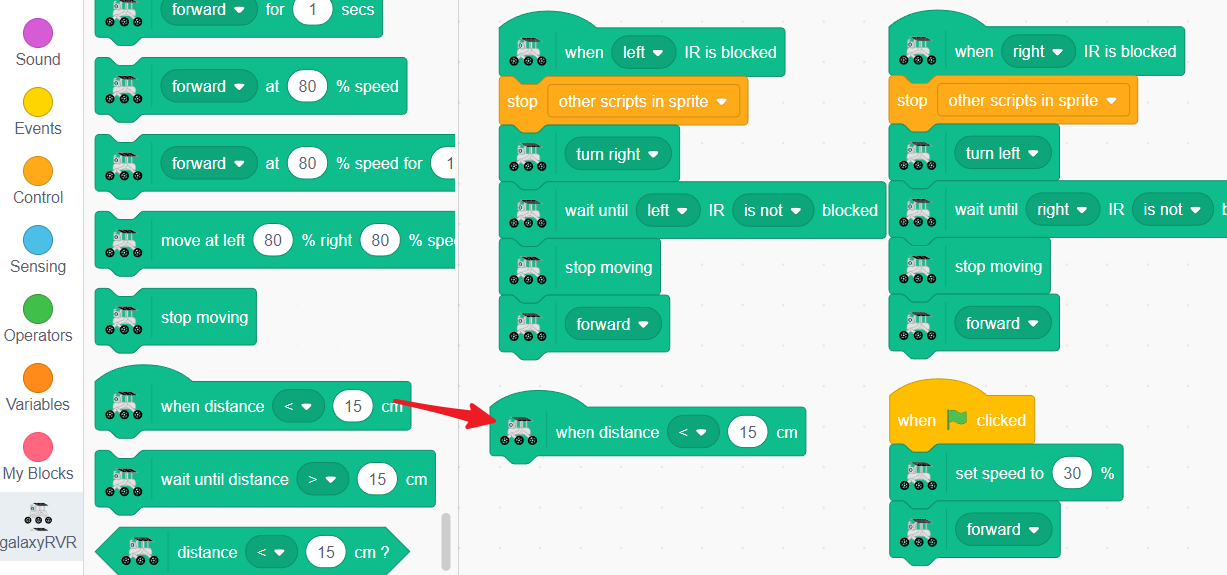
Um Verwirrung zu vermeiden, fügen wir einen
stop other scripts in spriteBlock hinzu. Dadurch wird sichergestellt, dass unser Rover immer nur einer Anweisung zurzeit folgt.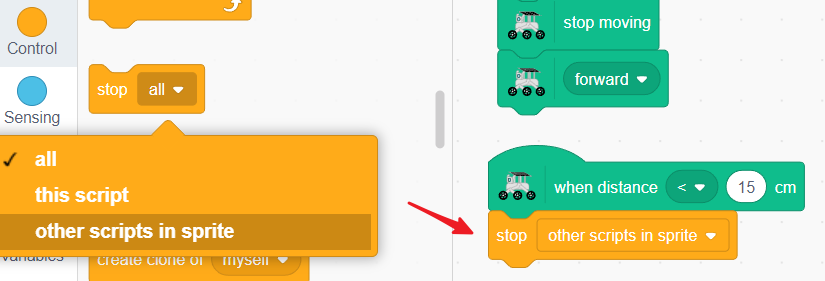
Wenn der Ultraschallsensor etwas in der Nähe erkennt, soll unser Rover bis zu einem sicheren Abstand zurücksetzen.
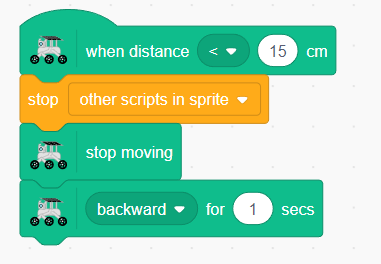
Jetzt müssen wir vom Hindernis weg drehen. Der Rover dreht sich für eine Sekunde – Sie können eine Links- oder Rechtsdrehung wählen!

Schließlich sagen wir dem Rover, dass er auf seinem neuen Weg weiter vorwärtsfahren soll.

Fantastisch! Jetzt haben Sie einen Rover, der drei Sensoren wie ein Team einsetzt:
Der vordere Ultraschallsensor erkennt entfernte Hindernisse
Der linke IR-Sensor erfasst Objekte auf der linken Seite
Der rechte IR-Sensor beobachtet die rechte Seite
Testen Sie Ihr Programm und beobachten Sie, wie geschmeidig Ihr Rover Hindernisse umfährt. Versuchen Sie, einen Hindernisparcours zu erstellen und sehen Sie, ob Ihr Rover ihn ohne Zusammenstöße bewältigen kann!
Herausforderung: Können Sie die Drehzeit oder den Abstand ändern, damit Ihr Rover noch besser Hindernissen ausweicht?