Bemerkung
Hallo und willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Gemeinschaft auf Facebook! Tauchen Sie tiefer ein in die Welt von Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten.
Warum beitreten?
Expertenunterstützung: Lösen Sie Nachverkaufsprobleme und technische Herausforderungen mit Hilfe unserer Gemeinschaft und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Anleitungen aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und exklusiven Einblicken.
Spezialrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Sind Sie bereit, mit uns zu erkunden und zu erschaffen? Klicken Sie auf [hier] und treten Sie heute bei!
Lektion 13: Komplette Mars-Rover-Steuerung
Sie haben alle Einzelteile gemeistert – jetzt setzen wir alles zusammen! Kombinieren Sie alles, was Sie gelernt haben, um Ihren voll funktionsfähigen Mars Rover mit Live-Kamerabild, Bewegungssteuerung und Kameraneigung zu erschaffen.
Vereinen Sie drei fantastische Systeme:
Das Kamerasystem Ihres Rovers erkunden: Sehen Sie durch die Augen Ihres Rovers mit Live-Video
GalaxyRVR Signalleuchten in Aktion: Fahren Sie mit bunten Signalleuchten umher
Touch-Steuerung für den Kamerawinkel: Schauen Sie mit der Kamerasteuerung auf und ab
Das Ergebnis? Die vollständige Kontrolle über Ihren GalaxyRVR! Klicken Sie auf Tasten für die Kamerasteuerung und verwenden Sie die Pfeiltasten zum Fahren.
Kamera-System
Wiederholen Sie den Kameraaufbau aus Ihrer vorherigen Lektion: Das Kamerasystem Ihres Rovers erkunden.
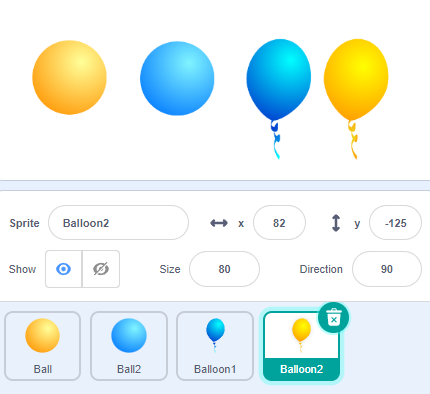
Erstellen Sie vier Steuerungs-Sprites und ordnen Sie sie ordentlich an.
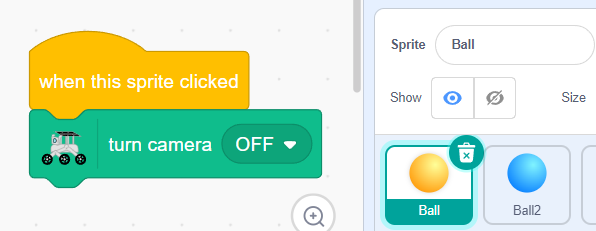
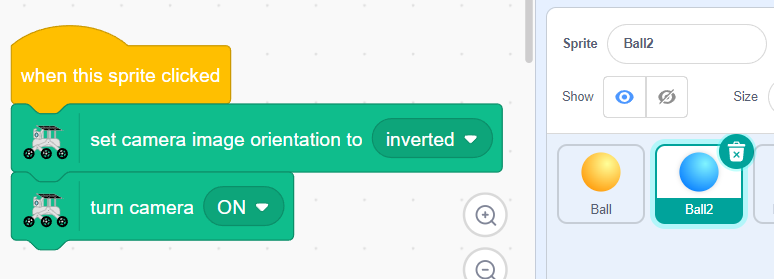
Programmieren Sie die Funktion jeder Taste:
Ball 1: Kamera AUS
Ball 2: Kamera EIN mit korrekter Ausrichtung
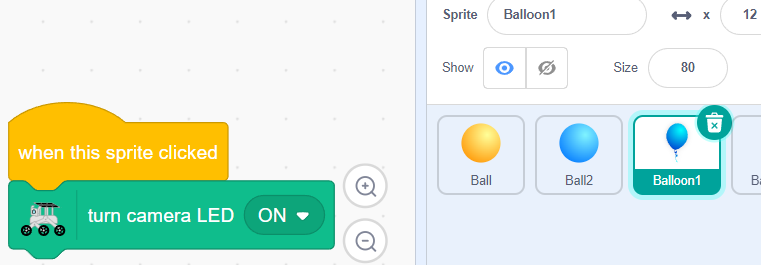
Balloon 1: LED-Licht EIN
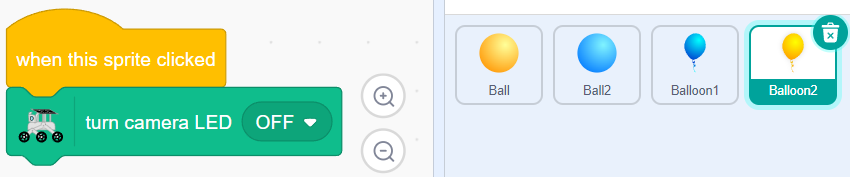
Balloon 2: LED-Licht AUS
Stapeln Sie die Steuerungen, um Platz zu sparen – sie entfalten sich, wenn Sie sie brauchen!
Fügen Sie
go to back layerhinzu, um einen coolen Umschalteffekt zwischen den Tasten zu erzeugen.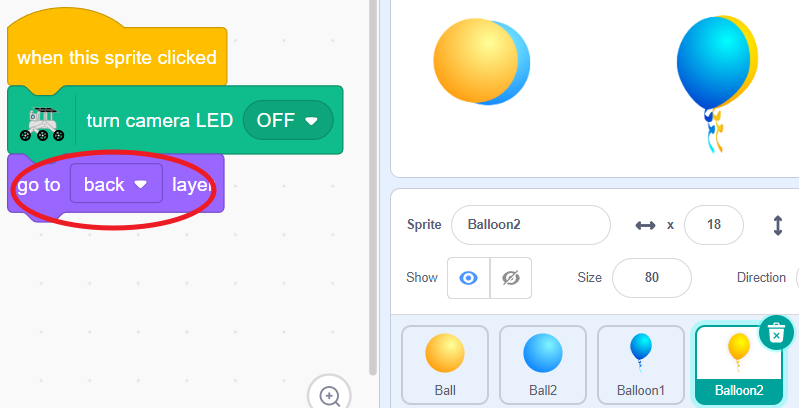
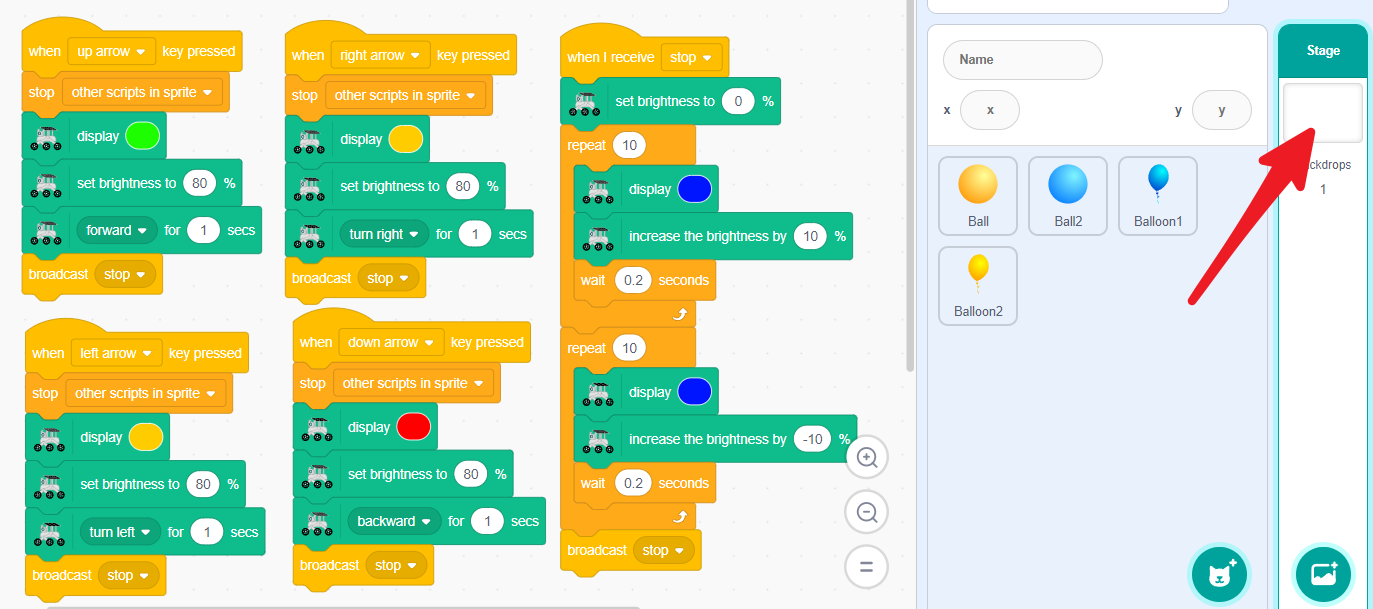
Bewegungs- und Beleuchtungssystem
Fügen wir nun bunte Lichter zu den Bewegungen Ihres Rovers hinzu! Wir haben diese bereits im Abschnitt GalaxyRVR Signalleuchten in Aktion programmiert.
Wir empfehlen, diesen Code im Bereich „Backdrops“ zu platzieren – dies hält ihn getrennt von Ihrem Sprite-Code und sorgt für mehr Übersichtlichkeit.
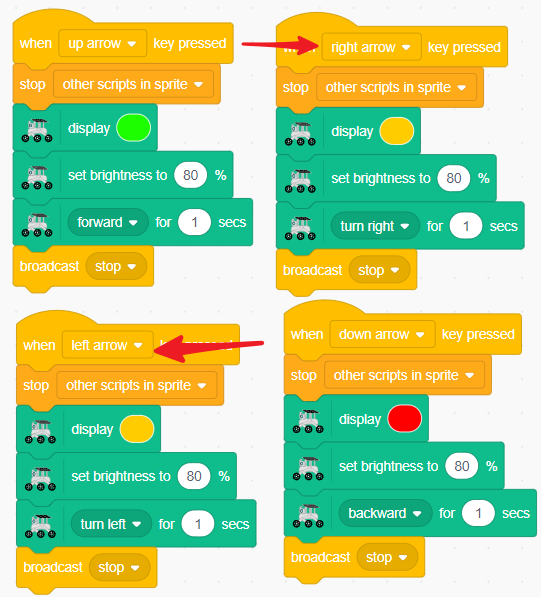
Lassen Sie Ihren Rover GRÜN leuchten, wenn er sich vorwärts bewegt.

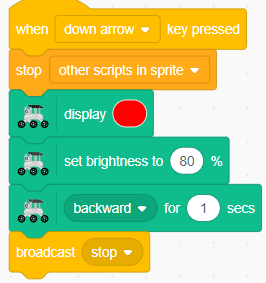
Lassen Sie Ihren Rover ROT leuchten, wenn er sich rückwärts bewegt.
Lassen Sie Ihren Rover GELB leuchten, wenn er nach links oder rechts abbiegt.
Erstellen Sie einen atmenden blauen Lichteffekt, wenn Ihr Rover angehalten ist.
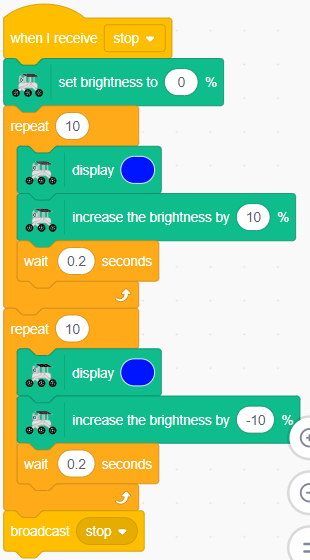
Ihr vollständiger Backdrop-Code sollte wie folgt aussehen:
Kameraneigungssteuerung
Fügen wir die Kamerasteuerung hinzu! Dieser Teil ist derselbe wie im Abschnitt Touch-Steuerung für den Kamerawinkel. Wiederholen Sie einfach die Schritte.
Fügen Sie ein Pfeil-Sprite zur Steuerung der Kameraneigung hinzu.
Beginnen Sie mit einem
when this sprite clicked-Block.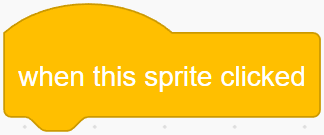
Erstellen Sie eine Schleife, die läuft, während Sie den Pfeil berühren.
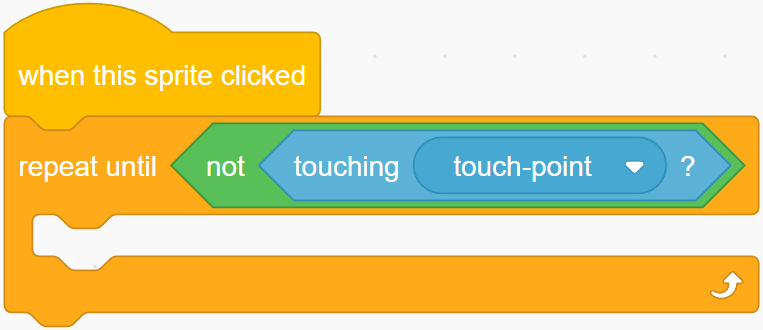
Lassen Sie den Pfeil beim Ziehen in Richtung Ihres Fingers zeigen.
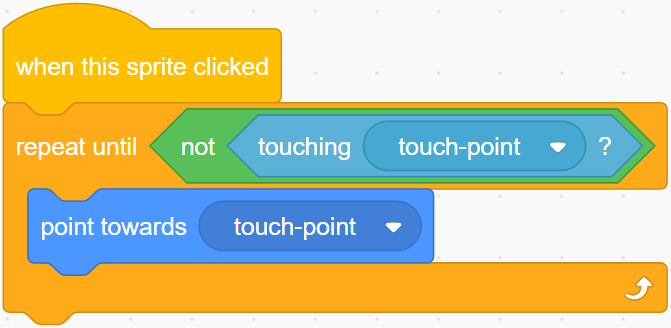
Verbinden Sie die Richtung des Pfeils mit dem Kamerawinkel – drehen Sie den Pfeil, um die Kamera zu bewegen!
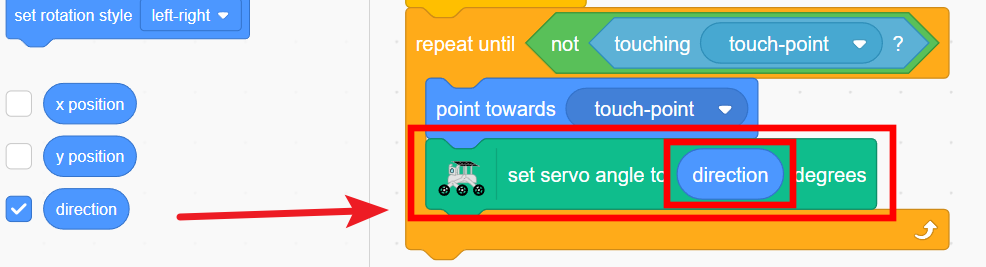
Setzen Sie Grenzen, um die Kamera zwischen 0 und 135 Grad zu halten.
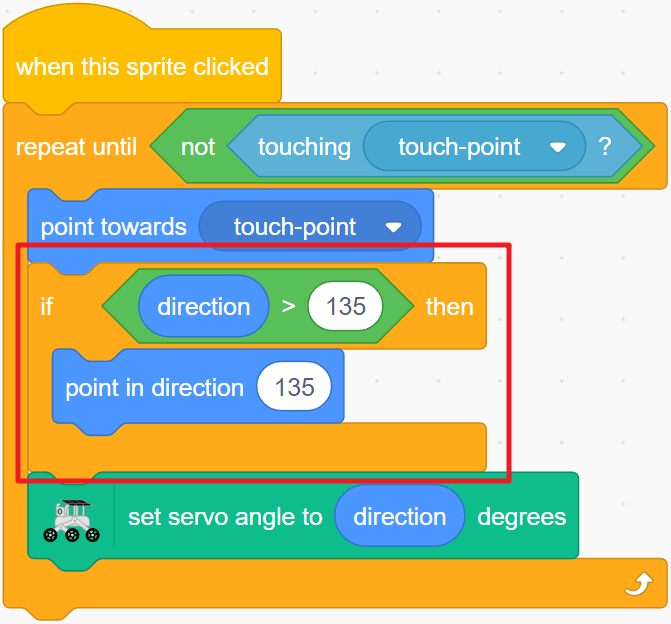
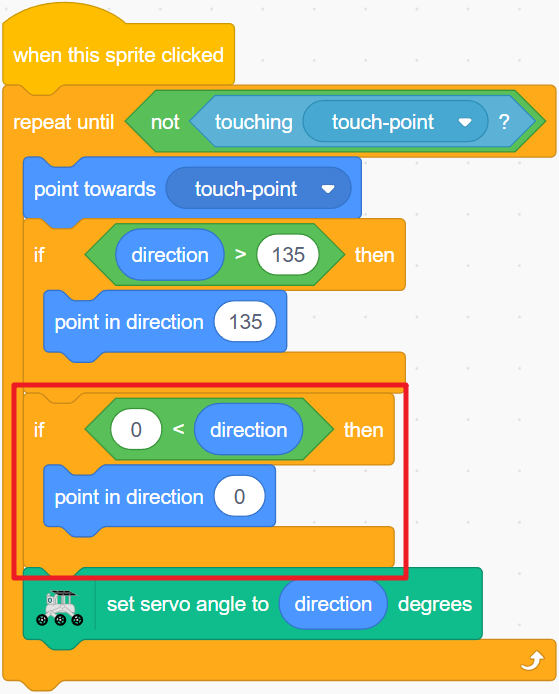
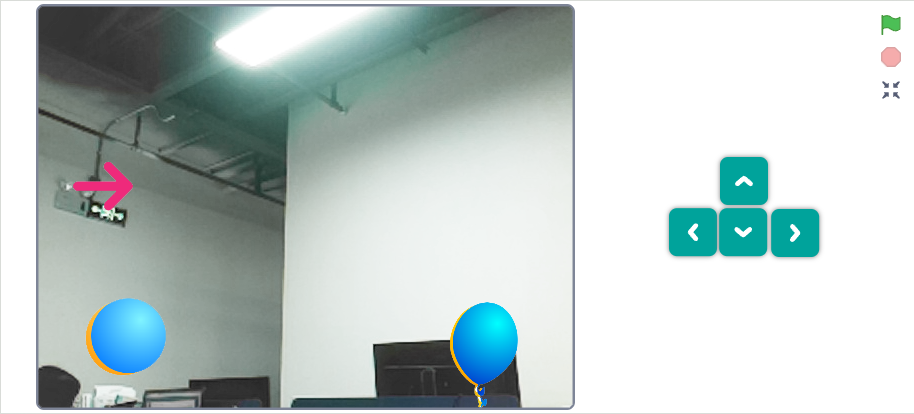
Berühren und ziehen Sie den Pfeil, um die Kamera Ihres Rovers auszurichten! Vergrößern Sie den Pfeil, falls er schwer zu steuern ist.
Komplette Steuerung Ihres GalaxyRVR
Jetzt haben Sie die volle Kontrolle über Ihren Mars Rover! So bedienen Sie Ihren vollständigen GalaxyRVR:
Steuerung Ihres Rovers:
Verwenden Sie die Pfeiltasten zum Vorwärts-, Rückwärtsfahren und Abbiegen
Klicken Sie auf die Ball-Sprites, um das Live-Kamerabild ein- oder auszuschalten
Klicken Sie auf die Ballon-Sprites, um das Kamera-LED-Licht ein- oder auszuschalten
Ziehen Sie das Pfeil-Sprite, um die Kamera nach oben und unten zu neigen
Alle Funktionen gemeinsam testen:
Fahren Sie umher, während Sie das Live-Kamerabild von Ihrem Rover beobachten
Beachten Sie die farbigen Lichter, die jede Bewegung signalisieren
Üben Sie das Neigen der Kamera, um Objekte aus verschiedenen Winkeln zu betrachten
Versuchen Sie die Erkundung sowohl bei hellen als auch bei dunklen Bedingungen mit dem LED-Licht
Herzlichen Glückwunsch! Sie haben erfolgreich alle Systeme kombiniert, um einen voll funktionsfähigen Mars Rover zu erschaffen. Sie haben gelernt, wie man Bewegung, Beleuchtung, Kamerasteuerung und Neigungsmechanismen programmiert – alle Fähigkeiten, die für den Betrieb eines echten Erkundungsroboters erforderlich sind.
Ihre Mars-Mission kann nun beginnen. Viel Spaß bei der Erkundung!