Bemerkung
Hallo und willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Gemeinschaft auf Facebook! Tauchen Sie tiefer ein in die Welt von Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten.
Warum beitreten?
Expertenunterstützung: Lösen Sie Nachverkaufsprobleme und technische Herausforderungen mit Hilfe unserer Gemeinschaft und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Anleitungen aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und exklusiven Einblicken.
Spezialrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Sind Sie bereit, mit uns zu erkunden und zu erschaffen? Klicken Sie auf [hier] und treten Sie heute bei!
Lektion 6: IR-Hindernisvermeidung
Lernen Sie die seitlichen „Augen“ Ihres Rovers kennen - die Infrarot-Hindernisvermeidungssensoren!
Diese cleveren Sensoren helfen Ihrem GalaxyRVR, Hindernisse an seinen Seiten zu erkennen und zu umgehen - ahnlich wie ein peripheres Sehen. Erfahren Sie, wie sie funktionieren, und programmieren Sie Ihren Rover, automatisch um Objekte herumzunavigieren.
Machen Sie sich bereit, Ihren Mars Rover zu einem intelligenten Hindernisvermeider zu machen!
Lernziele
Die Funktionsprinzipien des Infrarot-Hindernisvermeidungsmoduls und seine Anwendung im Mars Rover verstehen.
Lernen, wie man Daten des Infrarot-Hindernisvermeidungsmoduls in Scratch ausliest und anwendet.
Ein Mars-Erkundungsspiel zur Hindernisvermeidung mit dem IR-Modul und der Scratch-Buhne erstellen.
Das Hindernisvermeidungsmodul kennenlernen
Begru?en Sie den neuen Helfer Ihres GalaxyRVR - das Infrarot-Hindernisvermeidungsmodul! Dieses clevere kleine Gerat hilft Ihrem Rover, Hindernisse zu erkennen und zu vermeiden. Sehen wir uns an, was es ausmacht:
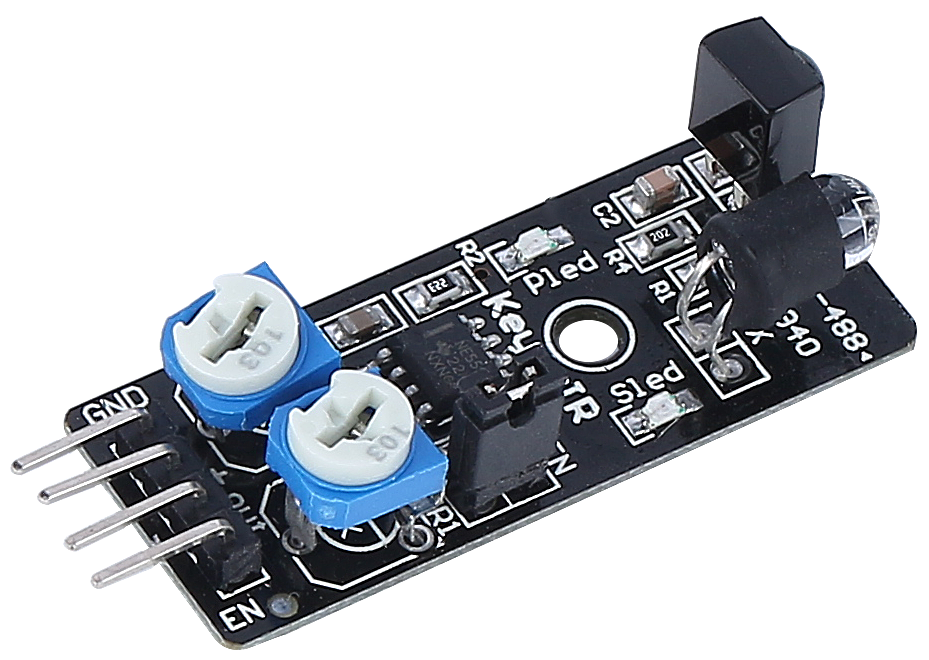
Die vier wichtigen Pins:
GND - Der Masseanschluss (schlie?t den Stromkreis)
+ - Stromeingang (benotigt 3,3 V bis 5 V Strom)
Out - Signalausgang (sendet „Hindernis erkannt“-Meldungen)
EN - Enable-Pin (steuert, wann das Modul aktiv ist)
So funktioniert es - Die unsichtbare Taschenlampe:
Stellen Sie sich vor, dieses Modul hatte eine unsichtbare Taschenlampe und eine spezielle Brille:
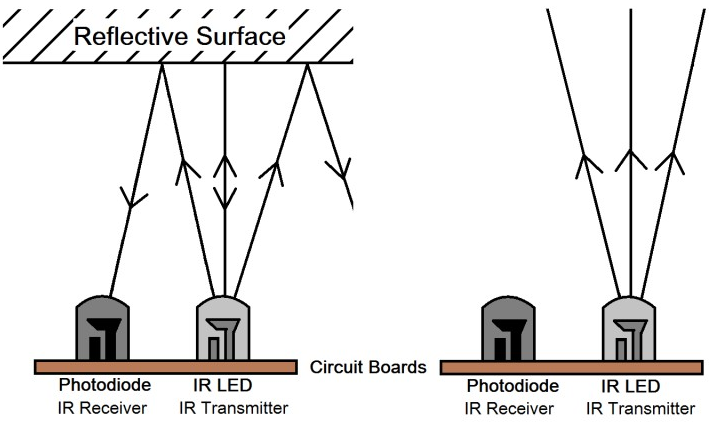
Der Sender sendet infrarotes Licht aus (für unsere Augen unsichtbar)
Wenn das Licht auf ein Hindernis trifft, wird es zurückgeworfen
Der Empfanger „sieht“ das reflektierte Licht
Das Modul sendet ein Signal: „Hindernis voraus!“
Wissenswertes über Ihren Sensor:
Erkennungsbereich: 2-40 cm (ungefahr die Lange Ihrer Federmappe!)
Farbe spielt eine Rolle: Funktioniert am besten mit hellen Objekten
Dunkle Objekte: Schwerer aus der Ferne zu erkennen
Erweiterte Steuerung (für Neugierige):
EN-Pin: Die Brucke halt das Modul dauerhaft aktiv. Entfernen Sie sie, wenn Sie das Modul mit Code steuern mochten.

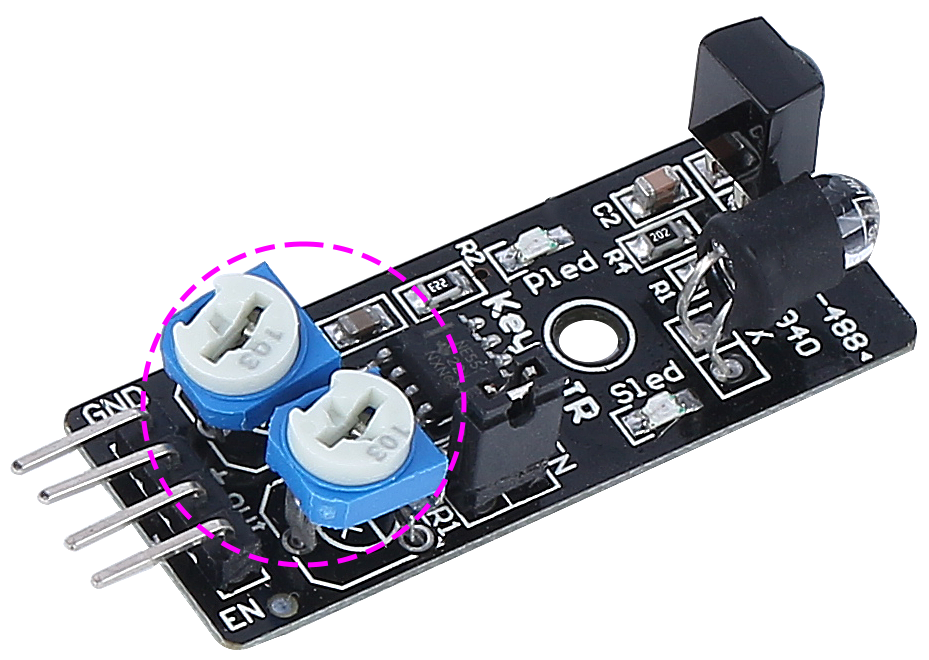
Zwei Einstellungen:
Ein Drehregler steuert, wie weit das infrarote Licht reicht
Ein Drehregler stellt die Lichtfrequenz ein
Nachdem Sie nun Ihren neuen Helfer kennengelernt haben, verbinden wir ihn mit Ihrem Rover und beginnen mit der Programmierung!
Testen Ihrer Infrarotsensoren
Stellen Sie zunachst eine Verbinden der App mit dem GalaxyRVR her.
Stimmen wir Ihre Sensoren für eine perfekte Leistung ab!
Stellen Sie sicher, dass die Infrarotkomponenten gerade sind. Korrigieren Sie sie vorsichtig bei Bedarf.
Platzieren Sie ein Objekt (z. B. die Rover-Verpackung) in 20 cm Entfernung. Drehen Sie den Regler, bis die Anzeige-LED aufleuchtet. Testen Sie, indem Sie das Objekt näher und weiter entfernt bewegen.
Wiederholen Sie den Vorgang für das andere Infrarotmodul.
Stellen Sie dann eine Verbinden der App mit dem GalaxyRVR her.
Suchen Sie die Blocke „linker IR-Status“ und „rechter IR-Status“ in der GalaxyRVR-Kategorie und aktivieren Sie deren Kontrollkastchen.
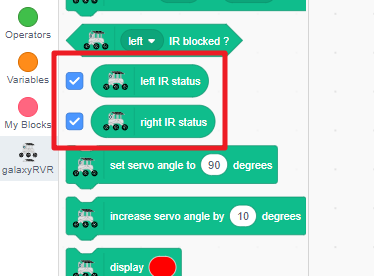
Die Sensorwerte werden nun auf Ihrer Buhne angezeigt.
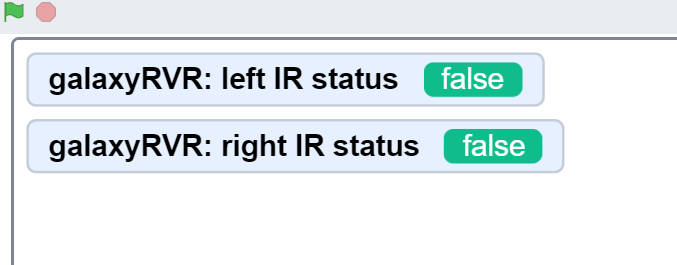
Winken Sie mit Ihrer Hand nahe an jedem Infrarotsensor und beobachten Sie, wie sich die Werte andern!
Bedeutung der Werte:
True = Hindernis erkannt
False = Freie Bahn
Jetzt sind Sie bereit zu sehen, was Ihr Rover „sehen“ kann!
Programmieren Sie Ihren Rover zur Hindernisvermeidung
Bringen wir Ihrem GalaxyRVR bei, mithilfe seiner Infrarotsensoren automatisch Hindernissen auszuweichen!
Stellen Sie zunachst eine Verbinden der App mit dem GalaxyRVR her.
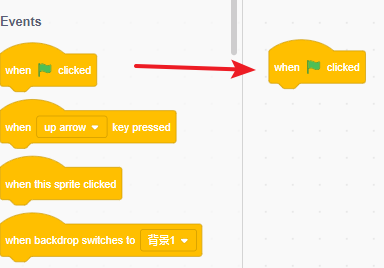
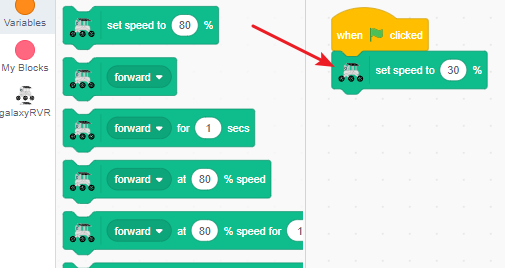
Starten Sie das Programm mit einem grunen Flaggenblock.
Stellen Sie eine sichere Geschwindigkeit von 30 % für einfaches Testen und Debuggen ein.
Suchen Sie den Block
when left IR is blockedfür die Erkennung durch den linken Sensor.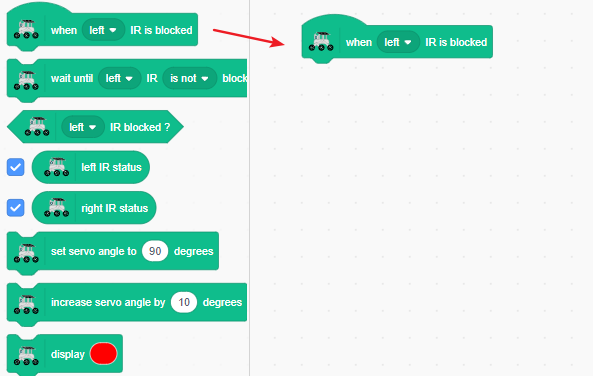
Wenn der linke Sensor ein Hindernis erkennt, lassen Sie den Rover nach rechts abbiegen.
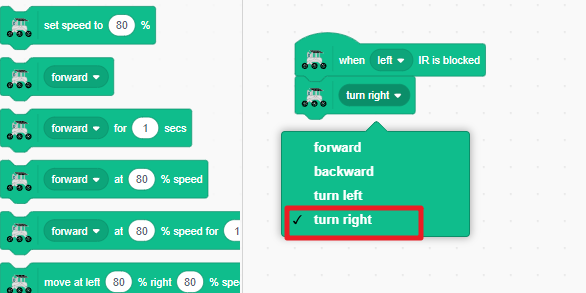
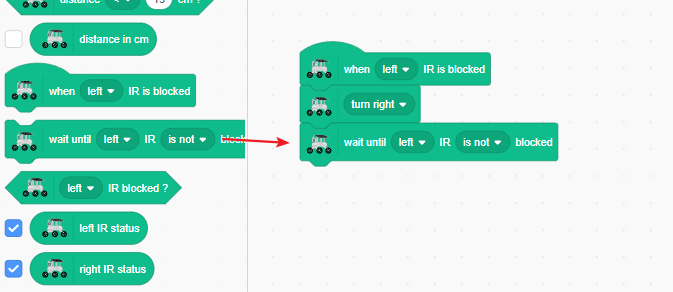
Fahren Sie mit dem Rechtsabbiegen fort, bis die linke Seite das Hindernis nicht mehr erkennt.
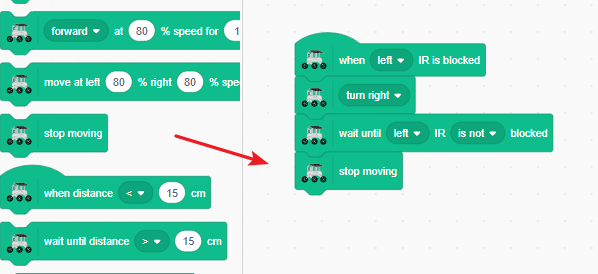
Stoppen Sie die Bewegung, sobald der Weg frei ist.
Testen Sie, indem Sie den linken Infrarotsensor mit Ihrer Hand auslösen. Der GalaxyRVR sollte intelligent nach rechts ausweichen.
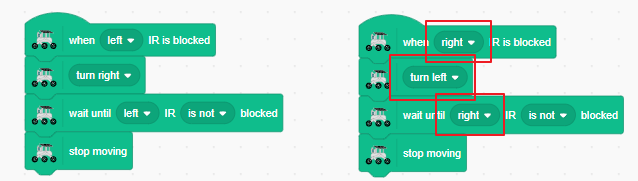
Duplizieren Sie den Code, indem Sie die Blocke lang gedruckt halten und „Duplizieren“ aus dem Menu auswahlen.
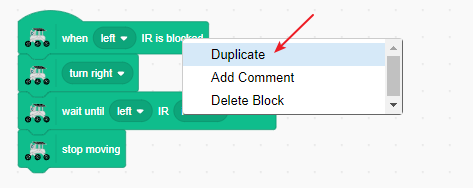
Tauschen Sie im duplizierten Code die linke und rechte Seite, sodass er Hindernisse auf der rechten Seite behandelt.
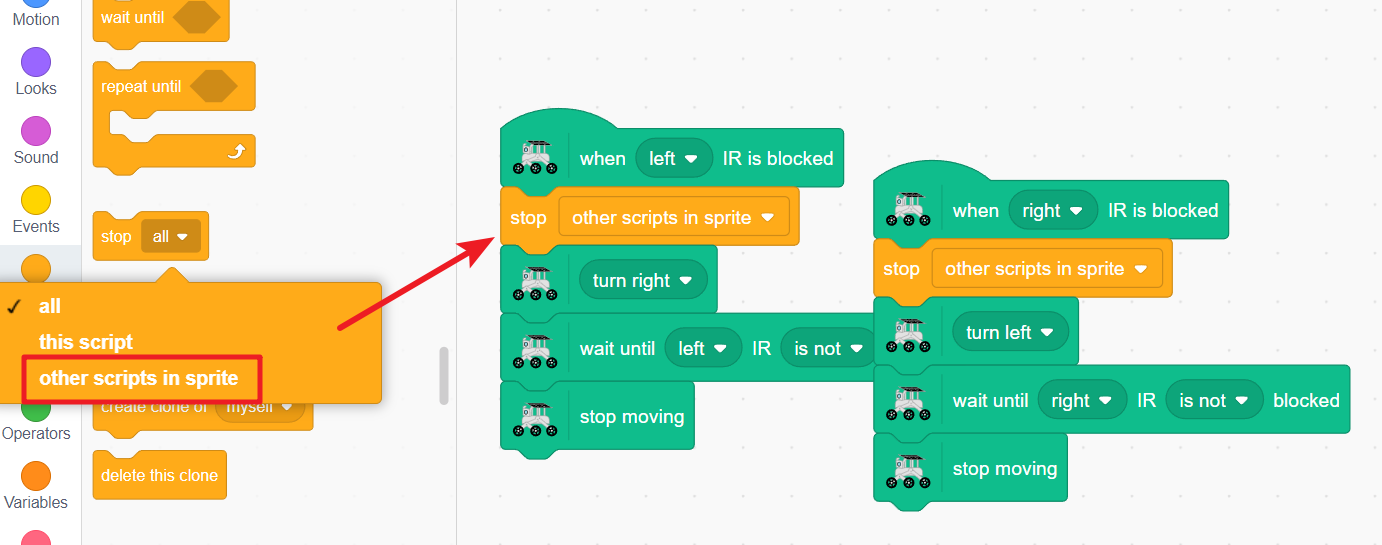
Um erratisches Verhalten zu verhindern, wenn beide Sensoren gleichzeitig ausgelost werden, fugen Sie einen „stoppe andere Skripte der Figur“-Block hinzu. Dadurch wird sichergestellt, dass immer nur ein Sensorereignis verarbeitet wird.
Bemerkung
Der Block zum Stoppen von Skripten kann mit zeitgesteuerten Bewegungsblocken in Konflikt geraten. Verwenden Sie sie daher nach Moglichkeit nicht zusammen.
Ihr GalaxyRVR wird nun nach links oder rechts abbiegen, wenn auf einer Seite Hindernisse erkannt werden. Testen Sie, indem Sie beide Sensoren mit Ihren Handen auslösen.
Fugen Sie unter jedem Codeabschnitt einen Vorwarts-Block hinzu, damit der Rover sich nach der Hindernisvermeidung weiterbewegt.
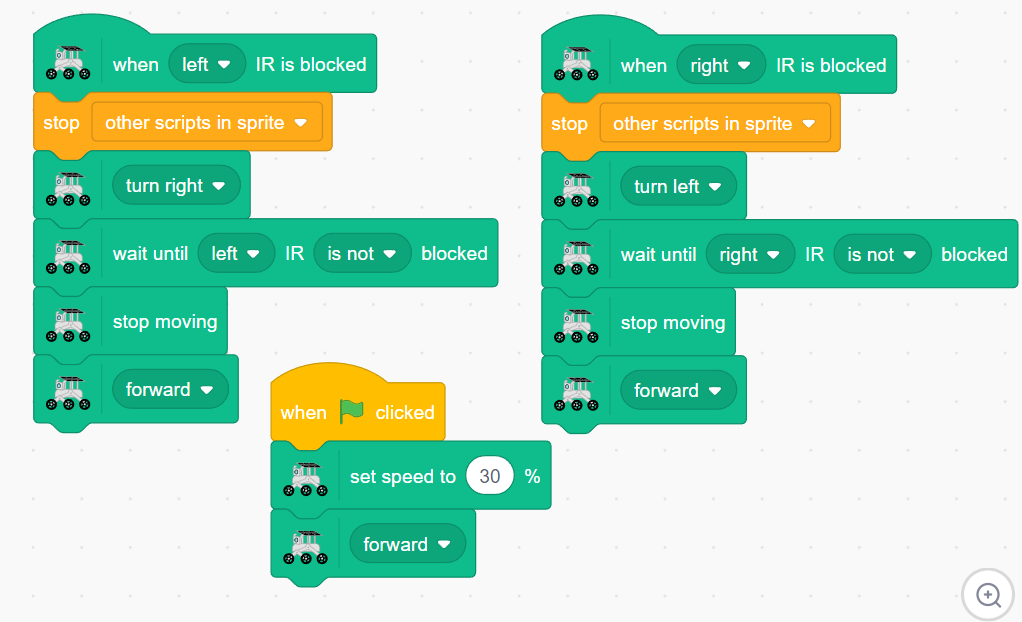
Klicken Sie nun auf die grune Flagge! Ihr GalaxyRVR fahrt kontinuierlich vorwarts, weicht intelligent Hindernissen aus und setzt seinen Weg nach der Umgehung fort.
Blocke im Zusammenhang mit dem IR-Modul
Ereignisblock, der ausgelost wird, wenn der linke IR-Sensor ein Hindernis erkennt
Andern Sie „links“ auf „rechts“ im Dropdown-Menu

Pausiert das Programm, bis der linke IR-Sensor kein Hindernis mehr erkennt
Andern Sie „links“ auf „rechts“ für den anderen Sensor
Andern Sie „ist nicht“ auf „ist“ für die gegenteilige Bedingung

Bedingungsblock, der WAHR zurückgibt, wenn der linke IR-Sensor ein Hindernis erkennt
Perfekt für die Verwendung mit
if-AnweisungenAndern Sie „links“ auf „rechts“ für den anderen Sensor

Zeigt den aktuellen Erkennungsstatus des linken IR-Sensors an

Zeigt den aktuellen Erkennungsstatus des rechten IR-Sensors an
