Bemerkung
Hallo und willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Gemeinschaft auf Facebook! Tauchen Sie tiefer ein in die Welt von Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten.
Warum beitreten?
Expertenunterstützung: Lösen Sie Nachverkaufsprobleme und technische Herausforderungen mit Hilfe unserer Gemeinschaft und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Anleitungen aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und exklusiven Einblicken.
Spezialrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Sind Sie bereit, mit uns zu erkunden und zu erschaffen? Klicken Sie auf [hier] und treten Sie heute bei!
Lektion 4: Ultraschallmodul
Statten Sie Ihren GalaxyRVR mit der Fahigkeit aus, mithilfe von Schall zu „sehen“!
Entdecken Sie, wie Ultraschallsensoren wie die Echoortung von Fledermausen funktionieren - sie senden Schallwellen aus und hören auf Echos, um Hindernisse zu erkennen und Entfernungen zu messen.
Machen Sie Ihren Mars Rover intelligenter und sicherer, während er erkundet!
Lernziele
Entdecken, wie Ultraschallsensoren Schallwellen zur Entfernungsmessung nutzen
Lernen, Entfernungsmessungen mit der Mammoth Coding-App auszulesen
Programmieren Ihres GalaxyRVR zur Hindernisvermeidung mit dem Ultraschallsensor
Das Ultraschallmodul erkunden
Lernen Sie den HC-SR04-Ultraschallsensor kennen - die neue „Superkraft“ Ihres Rovers, um Entfernungen zu sehen, ohne etwas zu berühren! Genau wie Fledermause Schall zur Navigation nutzen, kann dieses clevere Gerat Objekte von 2 cm bis 400 cm Entfernung erkennen.

Die vier wichtigen Pins:
TRIG - Der „Startknopf“, der dem Sensor sagt, dass er Schallwellen aussenden soll
ECHO - Hort auf das zurückkehrende Echo von Objekten
VCC - Stromanschluss (benotigt 5V Strom)
GND - Masseanschluss (schlie?t den Stromkreis)
So funktioniert es - Das Echo-Spiel:
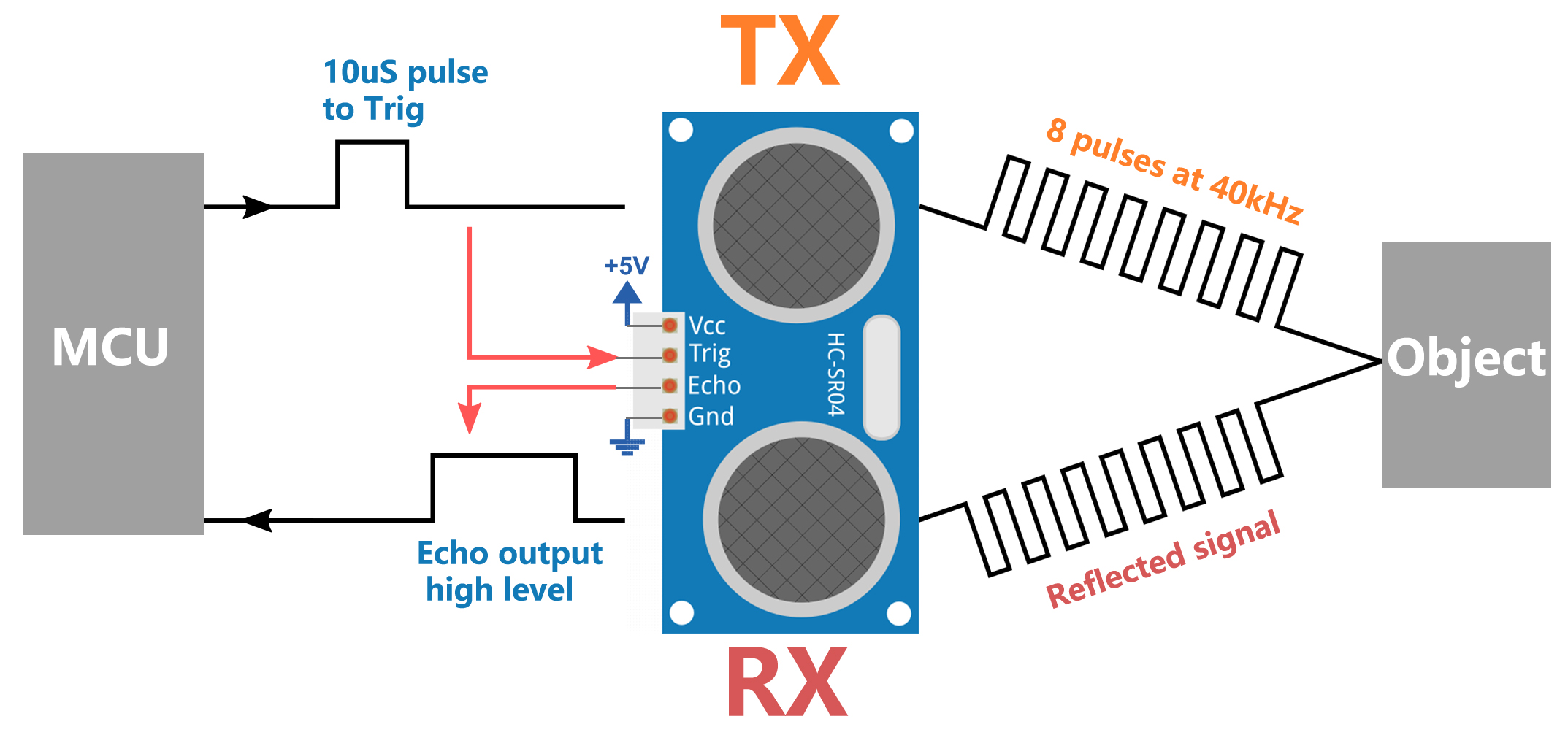
START - Der Sensor sendet 8 schnelle Schallwellen aus (zu hoch für unser Gehor!)
HOREN - Er beginnt mit der Zeitmessung und wartet auf das zurückkommende Echo
BERECHNEN - Mithilfe der Echozeit berechnet er: Entfernung = (Zeit x Schallgeschwindigkeit) / 2
Stellen Sie es sich wie Rufen in einer Schlucht vor - je langer Sie auf Ihr Echo warten müssen, desto weiter entfernt ist die Wand!
Jetzt geben wir Ihrem Mars Rover diese erstaunliche Superkraft!
Testen des Ultraschallsensors
Stellen Sie zunachst eine Verbinden der App mit dem GalaxyRVR her.
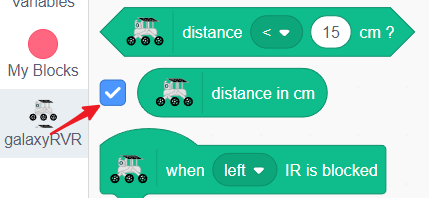
Suchen Sie den Block „Entfernung in cm“ in der GalaxyRVR-Kategorie und aktivieren Sie dessen Kontrollkastchen.
Die Messwerte des Sensors werden nun live auf der Buhne angezeigt.
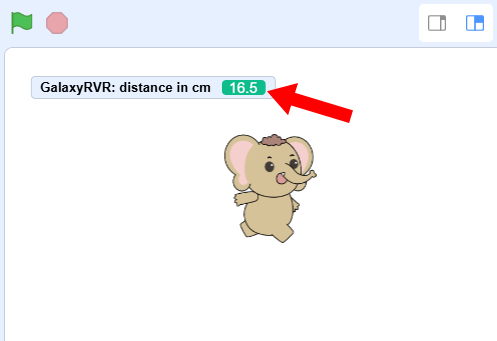
Winken Sie mit Ihrer Hand vor dem Ultraschallsensor und beobachten Sie, wie sich der Wert andert - er misst die Entfernung in Zentimetern!
Erstellen eines hindernisvermeidenden Rovers
Programmieren wir Ihren GalaxyRVR so, dass er mithilfe des Ultraschallsensors automatisch Hindernissen ausweicht.
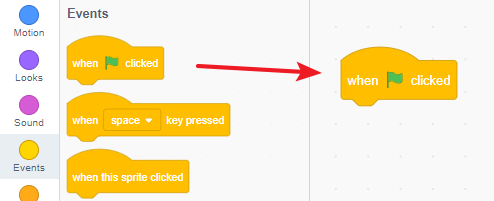
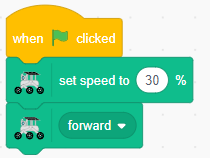
Beginnen Sie mit dem grunen Flaggenblock.
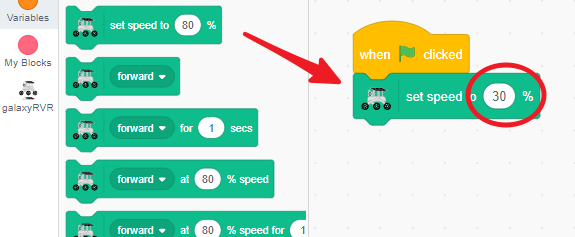
Stellen Sie eine angenehme Geschwindigkeit ein (wir empfehlen 30 %) zum Testen.
Fugen Sie einen „vorwarts bewegen“-Block hinzu, damit der Rover sich weiterbewegt, wenn der Weg frei ist.
Verwenden Sie den Block
when distance < 15 cm, um nahe Hindernisse zu erkennen.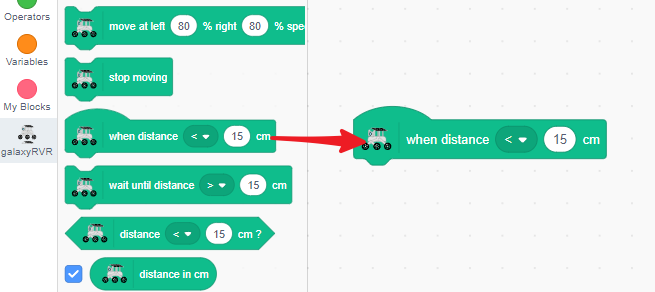
Wenn etwas zu nahe kommt, lassen Sie den Rover anhalten und zurücksetzen.
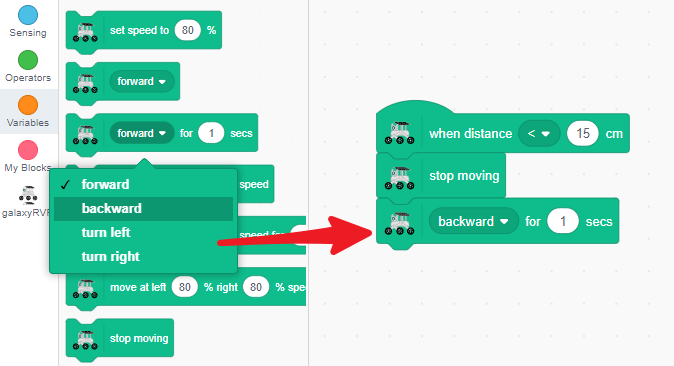
Lassen Sie ihn dann leicht abbiegen (links oder rechts - Ihre Wahl!).
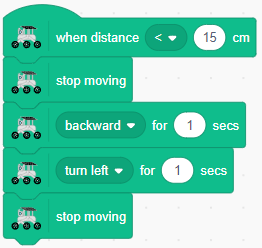
Sagen Sie ihm schlie?lich, er solle auf seinem neuen Weg wieder vorwarts fahren.
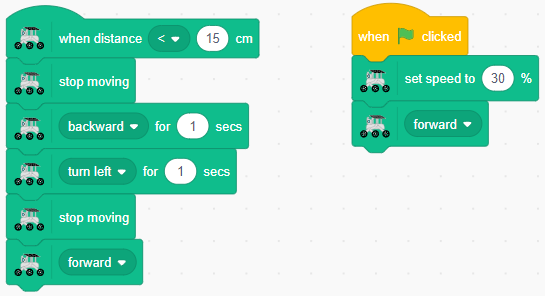
Stellen Sie nun Ihren GalaxyRVR auf den Boden und beobachten Sie ihn! Er fahrt vorwarts, bis er ein Hindernis erkennt, andert dann intelligent die Richtung und setzt seine Erkundung fort.
Ultraschallsensor-Blocke
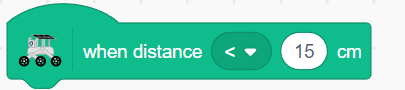
Ereignisausloser-Block
Startet Code, wenn ein Objekt innerhalb einer eingestellten Entfernung erkannt wird.
Andern Sie das Vergleichssymbol (< oder >)
Passen Sie den Entfernungsschwellenwert (in cm) an
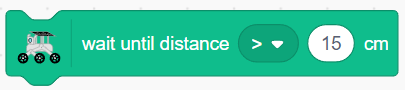
Warte-bis-Block
Halt Ihr Programm an, bis der Sensor ein Objekt in der angegebenen Entfernung erkennt.
Wahlen Sie < oder > für den Entfernungsvergleich
Stellen Sie Ihren gewunschten Entfernungswert ein
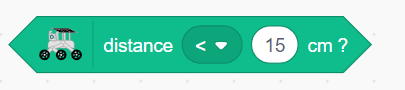
Bedingungsprufungs-Block
Gibt WAHR oder FALSCH basierend auf der Entfernungserkennung zurück. Perfekt für die Verwendung mit
if-Anweisungen.Wechseln Sie nach Bedarf zwischen < und >
Legen Sie den Entfernungsgrenzwert fest
Entfernungswert-Block
Zeigt die aktuelle Entfernungsmessung des Ultraschallsensors in Zentimetern an.