Nota
Ciao e benvenuto nella Community di Appassionati di SunFounder per Raspberry Pi, Arduino ed ESP32 su Facebook! Approfondisci il mondo di Raspberry Pi, Arduino ed ESP32 insieme ad altri appassionati.
Perché Unirsi?
Supporto Esperto: Risolvi problemi post-vendita e sfide tecniche con l’aiuto della nostra community e del nostro team.
Impara e Condividi: Scambia consigli e tutorial per migliorare le tue competenze.
Anteprime Esclusive: Ottieni accesso anticipato agli annunci dei nuovi prodotti e a contenuti esclusivi.
Sconti Speciali: Approfitta di sconti esclusivi sui nostri nuovi prodotti.
Promozioni Festive e Giveaway: Partecipa a concorsi e promozioni festive.
👉 Pronto a esplorare e creare con noi? Clicca su [Qui] e unisciti oggi!
2.2.6 Modulo MPU6050
Introduzione
L’MPU-6050 è il primo e unico dispositivo di tracciamento del movimento a 6 assi al mondo (giroscopio a 3 assi e accelerometro a 3 assi) progettato per smartphone, tablet e sensori indossabili che richiedono basso consumo energetico, basso costo e alte prestazioni.
In questo esperimento, utilizzeremo l’interfaccia I2C per ottenere i valori del sensore di accelerazione e del giroscopio a tre assi dell’MPU6050 e visualizzarli sullo schermo.
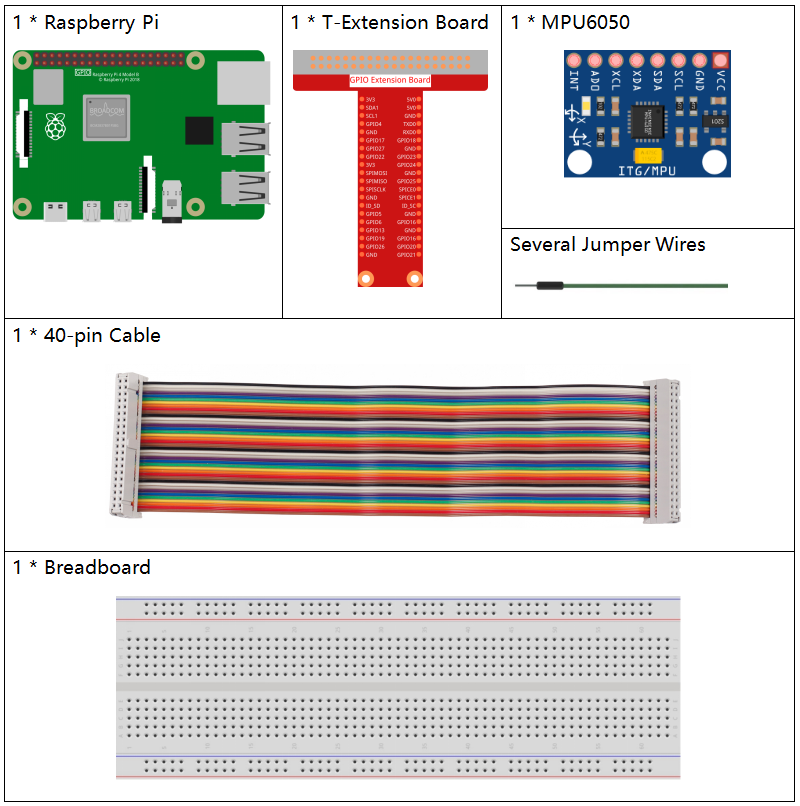
Componenti Necessari
In questo progetto, abbiamo bisogno dei seguenti componenti.
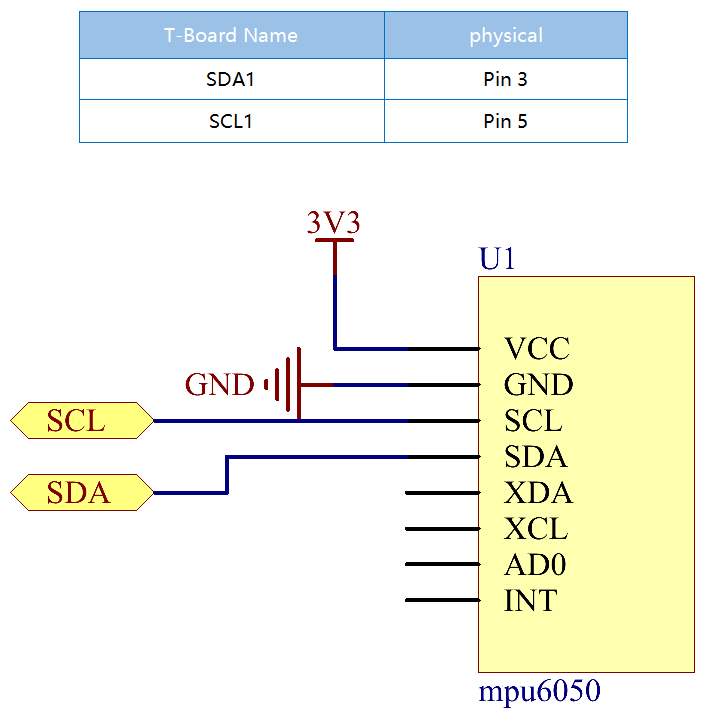
Schema Elettrico
L’MPU6050 comunica con il microcontrollore tramite l’interfaccia bus I2C. È necessario collegare i pin SDA1 e SCL1 ai pin corrispondenti.
Procedure Sperimentali
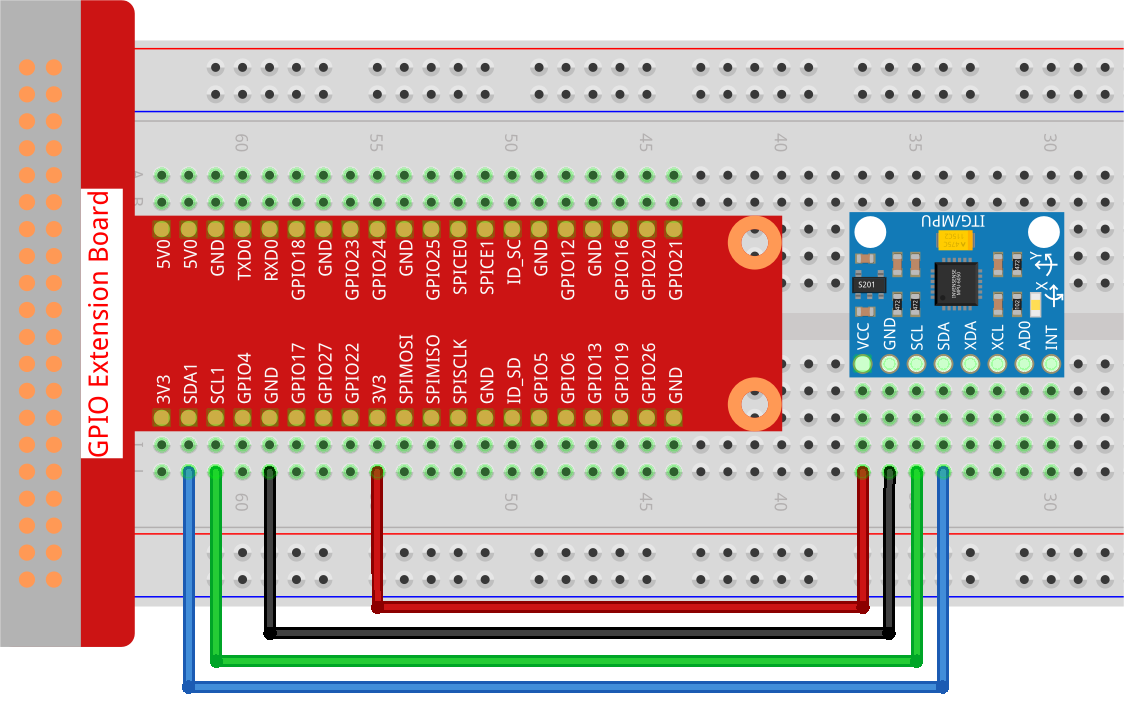
Passo 1: Costruisci il circuito.
Passo 2: Configura I2C (vedi Appendice Configurazione I²C. Se I2C è già configurato, salta questo passo.)
Passo 3: Vai nella cartella del codice.
cd ~/davinci-kit-for-raspberry-pi/python-pi5
Passo 4: Esegui il file eseguibile.
sudo python3 2.2.6_mpu6050.py
Dopo l’avvio del codice, verranno stampati sullo schermo l’angolo di deviazione degli assi x e y e l’accelerazione, oltre alla velocità angolare su ciascun asse, calcolati e letti dall’MPU6050.
Nota
Se ricevi l’errore
FileNotFoundError: [Errno 2] No such file or directory: '/dev/i2c-1', consulta Configurazione I²C per abilitare I2C.Se ricevi l’errore
ModuleNotFoundError: No module named 'smbus2', eseguisudo apt install python3-smbus2.Se appare l’errore
OSError: [Errno 121] Remote I/O error, significa che il modulo è cablato in modo errato o è danneggiato.
Avvertimento
Se compare l’errore RuntimeError: Cannot determine SOC peripheral base address, consulta Se gpiozero non funziona.
Codice
Nota
Puoi Modificare/Reimpostare/Copiare/Eseguire/Interrompere il codice qui sotto. Prima di farlo, però, vai al percorso del codice sorgente, come davinci-kit-for-raspberry-pi/python-pi5. Dopo aver modificato il codice, puoi eseguirlo direttamente per vedere il risultato.
import smbus
import math
import time
# Registri di gestione dell’alimentazione
power_mgmt_1 = 0x6b
power_mgmt_2 = 0x6c
def read_byte(adr):
return bus.read_byte_data(address, adr)
def read_word(adr):
high = bus.read_byte_data(address, adr)
low = bus.read_byte_data(address, adr+1)
val = (high << 8) + low
return val
def read_word_2c(adr):
val = read_word(adr)
if (val >= 0x8000):
return -((65535 - val) + 1)
else:
return val
def dist(a,b):
return math.sqrt((a*a)+(b*b))
def get_y_rotation(x,y,z):
radians = math.atan2(x, dist(y,z))
return -math.degrees(radians)
def get_x_rotation(x,y,z):
radians = math.atan2(y, dist(x,z))
return math.degrees(radians)
bus = smbus.SMBus(1) # oppure bus = smbus.SMBus(1) per le schede di revisione 2
address = 0x68 # Questo è l'indirizzo letto tramite il comando i2cdetect
# Ora risvegliamo il 6050 poiché si avvia in modalità sleep
bus.write_byte_data(address, power_mgmt_1, 0)
while True:
time.sleep(0.1)
gyro_xout = read_word_2c(0x43)
gyro_yout = read_word_2c(0x45)
gyro_zout = read_word_2c(0x47)
print ("gyro_xout : ", gyro_xout, " scaled: ", (gyro_xout / 131))
print ("gyro_yout : ", gyro_yout, " scaled: ", (gyro_yout / 131))
print ("gyro_zout : ", gyro_zout, " scaled: ", (gyro_zout / 131))
accel_xout = read_word_2c(0x3b)
accel_yout = read_word_2c(0x3d)
accel_zout = read_word_2c(0x3f)
accel_xout_scaled = accel_xout / 16384.0
accel_yout_scaled = accel_yout / 16384.0
accel_zout_scaled = accel_zout / 16384.0
print ("accel_xout: ", accel_xout, " scaled: ", accel_xout_scaled)
print ("accel_yout: ", accel_yout, " scaled: ", accel_yout_scaled)
print ("accel_zout: ", accel_zout, " scaled: ", accel_zout_scaled)
print ("x rotation: " , get_x_rotation(accel_xout_scaled, accel_yout_scaled, accel_zout_scaled))
print ("y rotation: " , get_y_rotation(accel_xout_scaled, accel_yout_scaled, accel_zout_scaled))
time.sleep(1)
Spiegazione del Codice
Legge i dati del sensore inviati dall’MPU6050.
def read_word(adr): high = bus.read_byte_data(address, adr) low = bus.read_byte_data(address, adr+1) val = (high << 8) + low return val def read_word_2c(adr): val = read_word(adr) if (val >= 0x8000): return -((65535 - val) + 1) else: return val
Calcola l’angolo di deviazione dell’asse y.
def get_y_rotation(x,y,z): radians = math.atan2(x, dist(y,z)) return -math.degrees(radians)
Calcola l’angolo di deviazione dell’asse x.
def get_x_rotation(x,y,z): radians = math.atan2(y, dist(x,z)) return math.degrees(radians)
Legge i valori degli assi x, y e z sul sensore giroscopico, converte i dati grezzi in valori di velocità angolare e li stampa.
gyro_xout = read_word_2c(0x43) gyro_yout = read_word_2c(0x45) gyro_zout = read_word_2c(0x47) print ("gyro_xout : ", gyro_xout, " scaled: ", (gyro_xout / 131)) print ("gyro_yout : ", gyro_yout, " scaled: ", (gyro_yout / 131)) print ("gyro_zout : ", gyro_zout, " scaled: ", (gyro_zout / 131))
Legge i valori degli assi x, y e z sul sensore accelerometrico, converte i dati in valori di accelerazione (unità di gravità) e li stampa.
accel_xout = read_word_2c(0x3b) accel_yout = read_word_2c(0x3d) accel_zout = read_word_2c(0x3f) accel_xout_scaled = accel_xout / 16384.0 accel_yout_scaled = accel_yout / 16384.0 accel_zout_scaled = accel_zout / 16384.0 print ("accel_xout: ", accel_xout, " scaled: ", accel_xout_scaled) print ("accel_yout: ", accel_yout, " scaled: ", accel_yout_scaled) print ("accel_zout: ", accel_zout, " scaled: ", accel_zout_scaled)
Stampa gli angoli di deviazione degli assi x e y.
print ("x rotation: " , get_x_rotation(accel_xout_scaled, accel_yout_scaled, accel_zout_scaled)) print ("y rotation: " , get_y_rotation(accel_xout_scaled, accel_yout_scaled, accel_zout_scaled))