Nota
Ciao, benvenuto nella Community di appassionati di Raspberry Pi, Arduino ed ESP32 di SunFounder su Facebook! Approfondisci Raspberry Pi, Arduino ed ESP32 con altri appassionati.
Perché unirsi?
Supporto esperto: Risolvi problemi post-vendita e sfide tecniche con l’aiuto della nostra community e del nostro team.
Impara e condividi: Scambia suggerimenti e tutorial per migliorare le tue competenze.
Anteprime esclusive: Accedi in anteprima a nuovi annunci di prodotti e a curiosità dietro le quinte.
Sconti speciali: Goditi sconti esclusivi sui nostri prodotti più recenti.
Promozioni e giveaway festivi: Partecipa a giveaway e promozioni festive.
👉 Pronto a esplorare e creare con noi? Clicca [Qui] e unisciti oggi stesso!
2.2.1 Fotoresistenza (MCP3008)
Nota
A seconda della versione del tuo kit, identifica se possiedi ADC0834 o MCP3008 e procedi con la sezione corrispondente.
Introduzione
La fotoresistenza è un componente comunemente utilizzato per rilevare l’intensità della luce ambientale. Aiuta il controllore a distinguere tra giorno e notte e a realizzare funzioni di controllo della luce, come ad esempio una lampada notturna. Questo progetto è molto simile a quello con il potenziometro: potresti considerarlo come un modo di rilevare la luce variando la tensione.
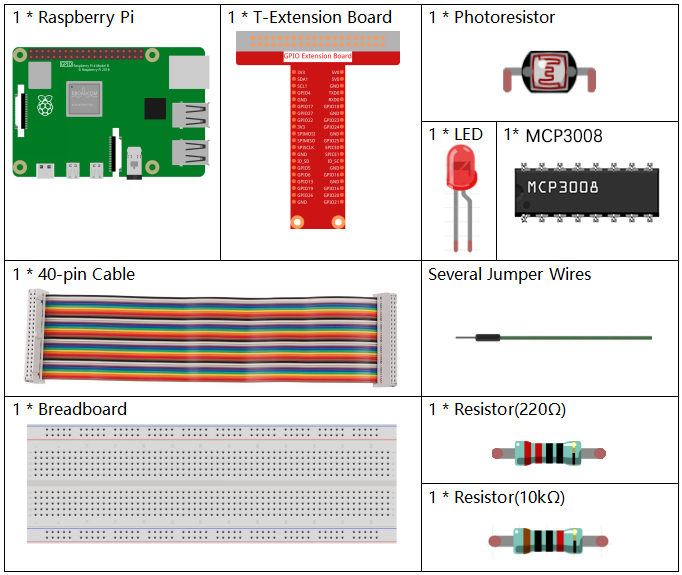
Componenti richiesti
In questo progetto ci servono i seguenti componenti.
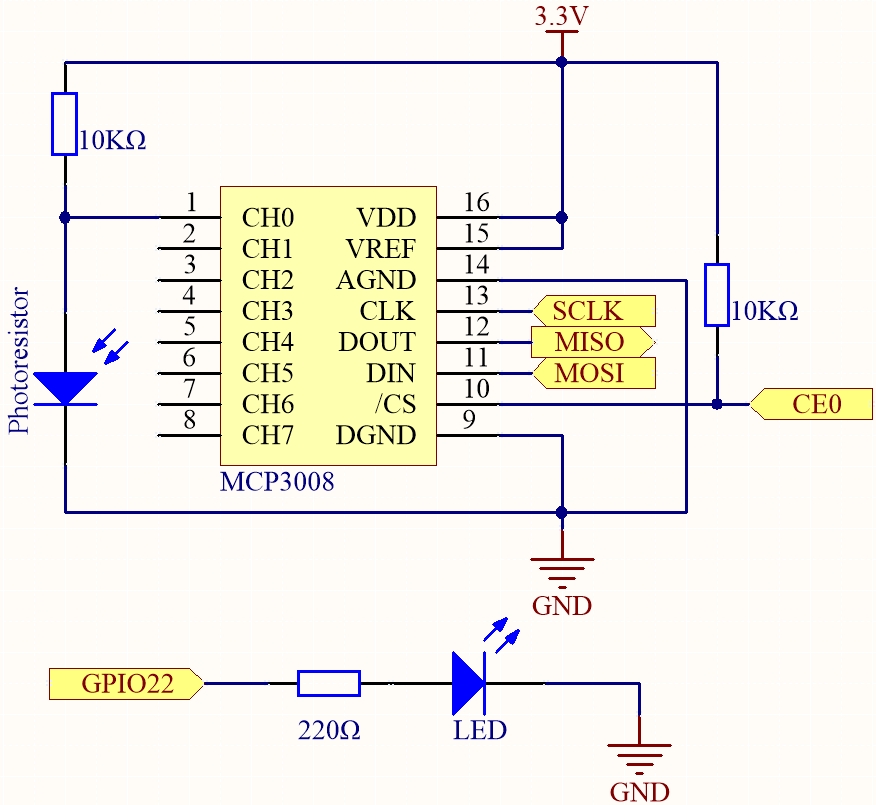
Schema elettrico
Nome T-Board |
Fisico |
WiringPi |
BCM |
|---|---|---|---|
SPICE0 |
pin24 |
10 |
8 |
SPIMOSI |
pin19 |
12 |
10 |
SPIMISO |
pin21 |
13 |
9 |
SPISCLK |
pin23 |
14 |
11 |
GPIO22 |
pin15 |
3 |
22 |
Procedura sperimentale
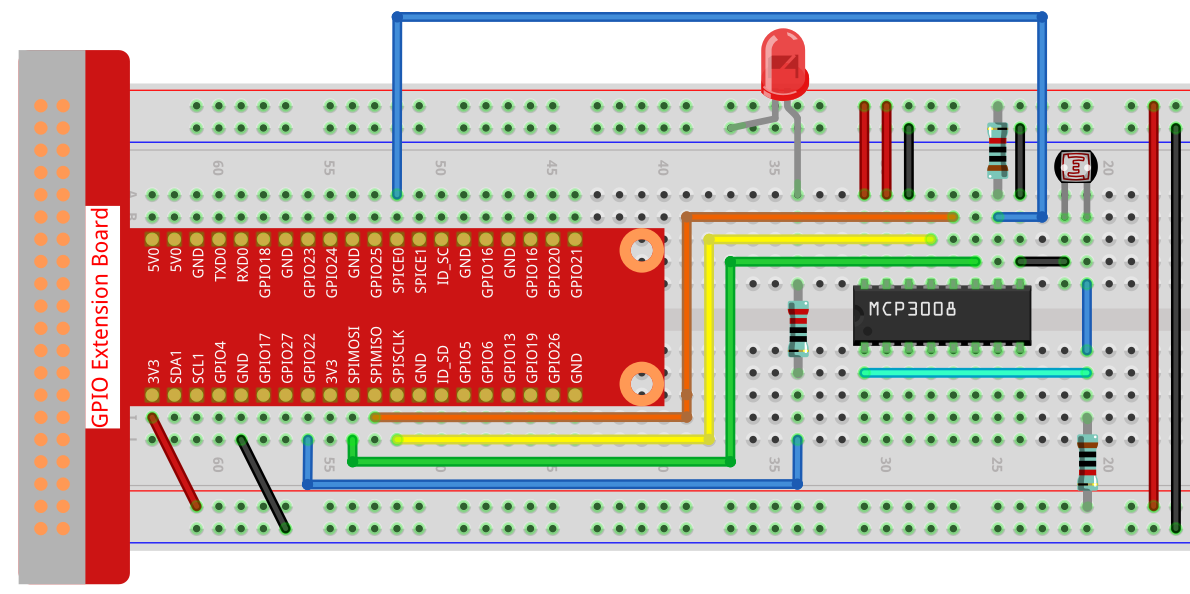
Passo 1: Montare il circuito.
Passo 2: Configurare l’interfaccia SPI e installare la libreria spidev (vedi Configurazione SPI per istruzioni dettagliate). Se hai già completato questi passaggi, puoi saltarli.
Passo 3: Spostati nella cartella del codice.
cd ~/davinci-kit-for-raspberry-pi/python-pi5
Passo 4: Eseguire il file.
sudo python3 2.2.1-2_Photoresistor_zero.py
Quando il codice è in esecuzione, la luminosità del LED varierà in base all’intensità luminosa rilevata dalla fotoresistenza.
Avvertimento
Se compare l’errore RuntimeError: Cannot determine SOC peripheral base address, consulta Se gpiozero non funziona.
Codice
Nota
Puoi Modificare/Reimpostare/Copiare/Eseguire/Interrompere il codice qui sotto. Prima, però, devi andare nel percorso sorgente del codice, ad esempio davinci-kit-for-raspberry-pi/python-pi5. Dopo aver modificato il codice, puoi eseguirlo direttamente per vedere l’effetto.
#!/usr/bin/env python3
import spidev
import time
from gpiozero import PWMLED
# Inizializza un LED PWM sul pin GPIO 22
led = PWMLED(22)
# Inizializza la comunicazione SPI (Bus 0, CE0 -> GPIO8)
spi = spidev.SpiDev()
spi.open(0, 0) # Bus 0, CS0
spi.max_speed_hz = 1000000 # 1 MHz
# Funzione per leggere dal canale MCP3008 (0–7)
def read_adc(channel):
"""
Legge un valore analogico dal MCP3008 (0–1023)
"""
if channel < 0 or channel > 7:
return -1
# Protocollo MCP3008: bit di start, modalità single-ended, canale (3 bit), riempitivo
r = spi.xfer2([1, (8 + channel) << 4, 0])
value = ((r[1] & 3) << 8) | r[2]
return value
# Funzione per mappare un valore da un intervallo a un altro
def MAP(x, in_min, in_max, out_min, out_max):
return (x - in_min) * (out_max - out_min) / (in_max - in_min) + out_min
# Ciclo principale per leggere il valore ADC e controllare la luminosità del LED
def loop():
while True:
# Legge il valore analogico dal canale 0 di MCP3008
analogVal = read_adc(0)
print('value = %d' % analogVal)
# Mappa 0–1023 all’intervallo PWM 0.0–1.0
led.value = analogVal / 1023.0
# Attende 0,2 secondi
time.sleep(0.2)
# Avvia il ciclo principale e gestisce KeyboardInterrupt per chiusura pulita
try:
loop()
except KeyboardInterrupt:
led.value = 0 # Spegne il LED prima di uscire
Spiegazione del codice
Importa la classe
PWMLEDdalla libreriagpiozeroper controllare i LED PWM,spidevper la comunicazione SPI con MCP3008 etimeper gestire i ritardi.#!/usr/bin/env python3 import spidev import time from gpiozero import PWMLED
Inizializza un LED PWM collegato al pin GPIO 22 e imposta l’interfaccia SPI per MCP3008 (Bus 0, CE0). La velocità SPI è impostata a 1 MHz.
led = PWMLED(22) spi = spidev.SpiDev() spi.open(0, 0) spi.max_speed_hz = 1000000
Definisce una funzione per leggere da un canale specifico di MCP3008. Invia un comando di 3 byte tramite SPI e ottiene un valore a 10 bit (0–1023) dalla risposta.
def read_adc(channel): if channel < 0 or channel > 7: return -1 r = spi.xfer2([1, (8 + channel) << 4, 0]) value = ((r[1] & 3) << 8) | r[2] return value
Definisce la funzione
MAP()che converte un numero da un intervallo a un altro. Utile per trasformare valori ADC grezzi in un intervallo PWM.# Define a function for mapping values from one range to another def MAP(x, in_min, in_max, out_min, out_max): return (x - in_min) * (out_max - out_min) / (in_max - in_min) + out_min
Il ciclo
loop()legge ripetutamente il valore analogico dal canale 0, lo converte in luminosità PWM (0.0–1.0) e lo applica al LED, con una pausa di 0,2 secondi.# Main loop for reading ADC value and controlling LED brightness def loop(): while True: # Read analog value from channel 0 of MCP3008 analogVal = read_adc(0) print('value = %d' % analogVal) # Map 0–1023 to PWM range 0.0–1.0 led.value = analogVal / 1023.0 # Wait for 0.2 seconds time.sleep(0.2)
La gestione di
KeyboardInterruptassicura che, alla chiusura del programma, il LED venga spento.try: loop() except KeyboardInterrupt: led.value = 0