Lesson 17 ADXL345¶
Introduction¶
In this lesson, we will learn how to use the acceleration sensor ADXL345.
Components¶
- 1 * Raspberry Pi
- 1 * Breadboard
- 1 * ADXL345 module
- 1 * T-Extension Board
- 1 * 40-Pin GPIO Cable
- Jumper wires
Principle¶
ADXL345
The ADXL345 is a small, thin, low power, 3-axis accelerometer with high resolution (13-bit) measurement at up to ±16 g. Digital output data is formatted as 16-bit two’s complement and is accessible through either an SPI (3- or 4-wire) or I2C digital interface.
The ADXL345 is well suited to measure the static acceleration of gravity in tilt-sensing applications, as well as dynamic acceleration resulting from motion or shock. Its high resolution (4 mg/LSB) enables the inclination change measurement by less than 1.0°. And the excellent sensitivity (3.9mg/LSB @2g) provides a high-precision output of up to ±16g.
In this experiment, I2C digital interface is used.
ADXL345 works like this:
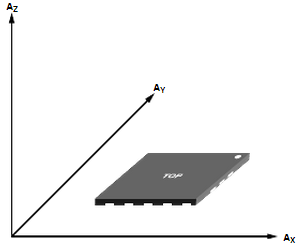
Axes of detection by ADXL345
When you place the module face up, Z_OUT is at the maximum which is +1g; face down, Z_OUT is at the minimum. No matter of face, as long as it’s placed on a level surface, X_OUT increases along the Ax axis direction, so does Y_OUT along the Ay axis. See the picture below. Thus, when you rotate the module, you can see the changes of X_OUT, Y_OUT, and Z_OUT.
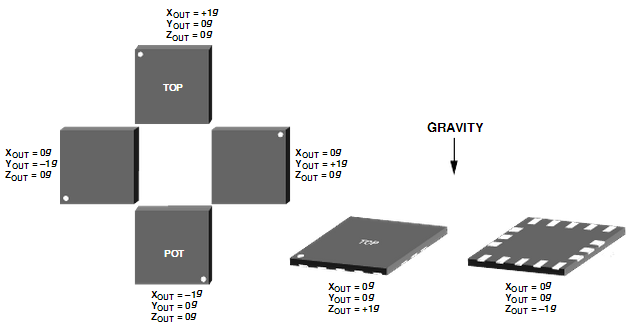
Relationship between output and gravity direction
Pin Function of ADXL345 Module:
Name |
Description |
VS |
Supply Voltage |
CS |
Chip Select; I2C mode is enabled if it’s tie-high to VDD I/O (VDD I/O = 1.8V). |
SDO |
Serial Data Out, alternate I2C address select |
INT1 |
Interrupt 1 Output |
INT2 |
Interrupt 2 Output |
3.3V |
3.3V |
SDA |
Serial Data (I2C), Serial Data In (SPI 4-Wire), Serial Data In/Out (SPI 3-Wire) |
SCL |
Serial Communications Clock |
GND |
GND |
Experimental Procedures¶
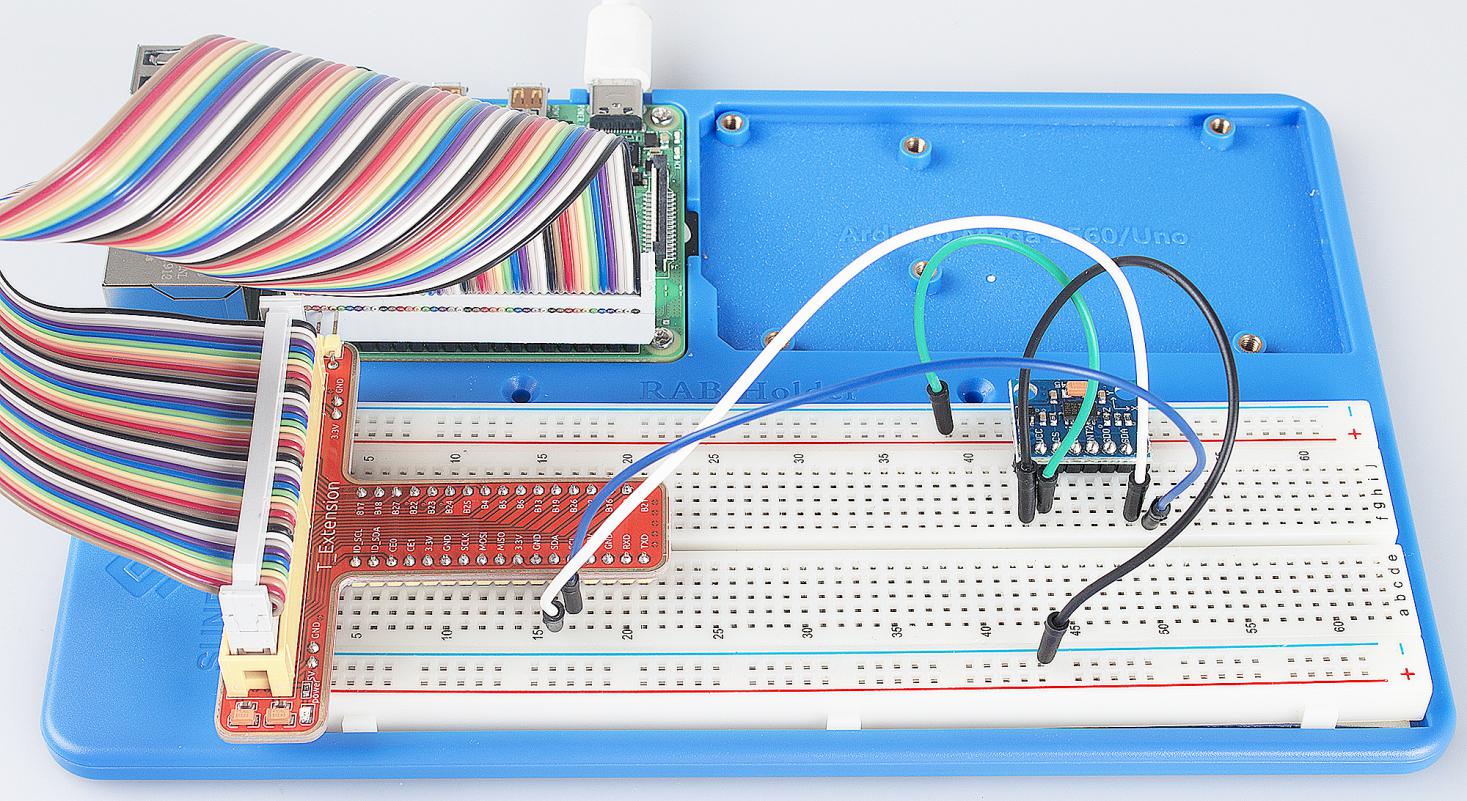
Step 1: Build the circuit.
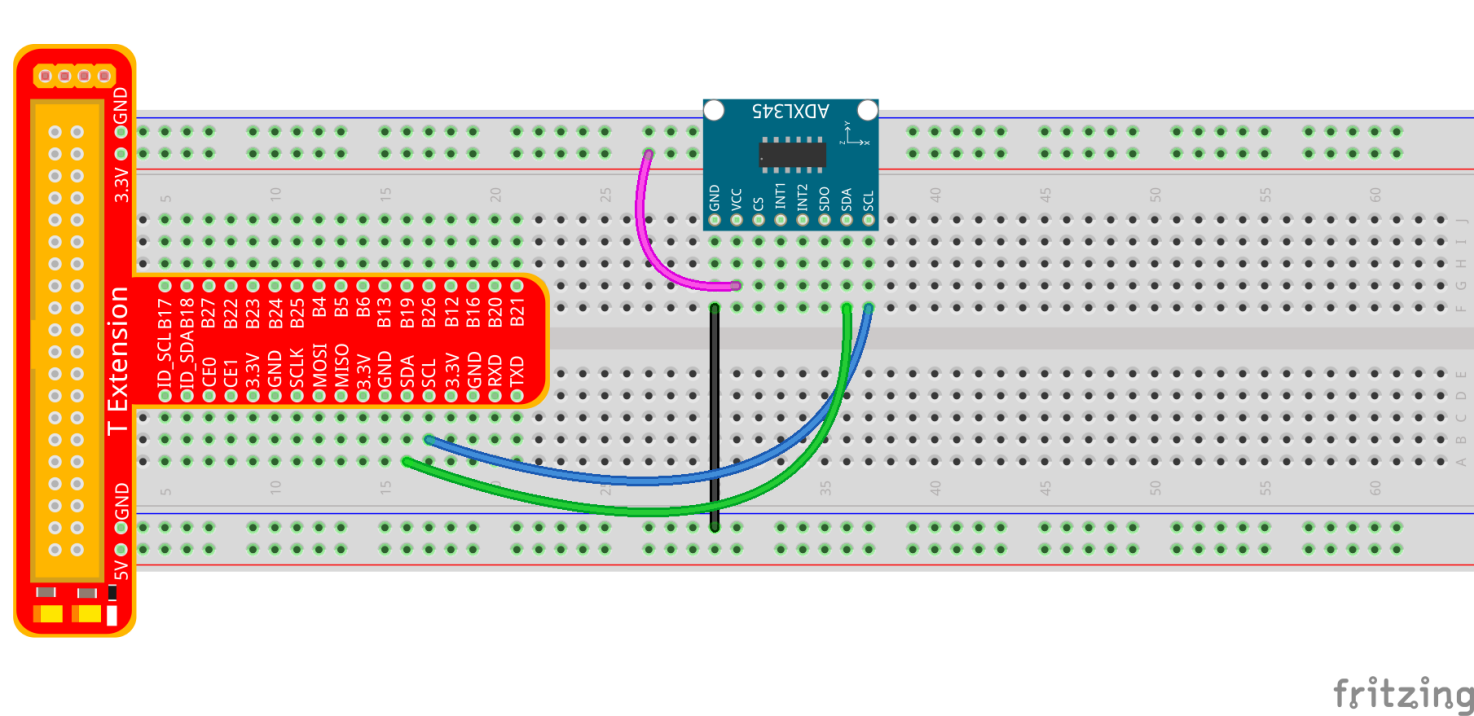
The I2C interface is used in the following program. Before running the program, please make sure the I2C driver module of Raspberry Pi has loaded normally.
For C Language Users:¶
Step 2: Get into the folder of code.
cd /home/pi/SunFounder_Super_Kit_V3.0_for_Raspberry_Pi/C
Step 3: Compile the Code.
make 17_adxl345
Step 4: Run.
sudo ./17_adxl345
Note
If it does not work after running, or there is an error prompt: “wiringPi.h: No such file or directory”, please refer to C code is not working?.
Code
#include <wiringPiI2C.h>
#include <stdio.h>
#include <stdlib.h>
#include <errno.h>
#include <unistd.h>
#define DevAddr 0x53 //device address
#define SENSITIVITY 256.00 //the sensitivity at each axis is 256LSB/g in +-2g,10bit or full resolution
struct acc_dat{
int x;
int y;
int z;
};
void adxl345_init(int fd)
{
wiringPiI2CWriteReg8(fd, 0x31, 0x0b); //set the range as +-16g & full resolution
wiringPiI2CWriteReg8(fd, 0x2d, 0x08);
// wiringPiI2CWriteReg8(fd, 0x2e, 0x00);
wiringPiI2CWriteReg8(fd, 0x1e, 0x00);
wiringPiI2CWriteReg8(fd, 0x1f, 0x00);
wiringPiI2CWriteReg8(fd, 0x20, 0x00);
wiringPiI2CWriteReg8(fd, 0x21, 0x00);
wiringPiI2CWriteReg8(fd, 0x22, 0x00);
wiringPiI2CWriteReg8(fd, 0x23, 0x00);
wiringPiI2CWriteReg8(fd, 0x24, 0x01);
wiringPiI2CWriteReg8(fd, 0x25, 0x0f);
wiringPiI2CWriteReg8(fd, 0x26, 0x2b);
wiringPiI2CWriteReg8(fd, 0x27, 0x00);
wiringPiI2CWriteReg8(fd, 0x28, 0x09);
wiringPiI2CWriteReg8(fd, 0x29, 0xff);
wiringPiI2CWriteReg8(fd, 0x2a, 0x80);
wiringPiI2CWriteReg8(fd, 0x2c, 0x0a);
wiringPiI2CWriteReg8(fd, 0x2f, 0x00);
wiringPiI2CWriteReg8(fd, 0x38, 0x9f);
}
struct acc_dat adxl345_read_xyz(int fd)
{
char x0, y0, z0, x1, y1, z1;
struct acc_dat acc_xyz;
x0 = 0xff - wiringPiI2CReadReg8(fd, 0x32);
x1 = 0xff - wiringPiI2CReadReg8(fd, 0x33);
y0 = 0xff - wiringPiI2CReadReg8(fd, 0x34);
y1 = 0xff - wiringPiI2CReadReg8(fd, 0x35);
z0 = 0xff - wiringPiI2CReadReg8(fd, 0x36);
z1 = 0xff - wiringPiI2CReadReg8(fd, 0x37);
// printf(" x0 = %d ",x0);printf("x1 = %d \n",x1);
// printf(" y0 = %d ",y0);printf("y1 = %d \n",y1);
// printf(" z0 = %d ",z0);printf("z1 = %d \n",z1);
acc_xyz.x = (int)(x1 << 8) + (int)x0;
acc_xyz.y = (int)(y1 << 8) + (int)y0;
acc_xyz.z = (int)(z1 << 8) + (int)z0;
if(acc_xyz.x > 32767){
acc_xyz.x -= 65536;
}
if(acc_xyz.y > 32767){
acc_xyz.y -= 65536;
}
if(acc_xyz.z >32767){
acc_xyz.z -= 65536;
}
return acc_xyz;
}
int main(void)
{
int fd;
struct acc_dat acc_xyz;
fd = wiringPiI2CSetup(DevAddr);
if(-1 == fd){
perror("I2C device setup error");
}
adxl345_init(fd);
while(1){
acc_xyz = adxl345_read_xyz(fd);
float x = acc_xyz.x/SENSITIVITY;
float y = acc_xyz.y/SENSITIVITY;
float z = acc_xyz.z/SENSITIVITY;
printf("x: %.2f y: %.2f z: %.2f\n", x,y,z);
sleep(1);
}
return 0;
}
Code Explanation
#include <wiringPiI2C.h> // Include functions and method for the IIC protocol
#define DevAddr 0x53 // device address
struct acc_dat
{ // a struct variable to store the value of x,y,and z
int x;
int y;
int z;
};
fd = wiringPiI2CSetup(DevAddr); // This initialises the I2C system with your given device identifier
void adxl345_init(int fd)
{ // Initialize the device by i2c
wiringPiI2CWriteReg8(fd, 0x31, 0x0b);
// These write an 8-bit data value into the device register indicated.
wiringPiI2CWriteReg8(fd, 0x2d, 0x08);
// Write 0x08 to the address(0x21) of the i2c device
}
struct acc_dat adxl345_read_xyz(int fd)
{
// a struct function, returning a struct value
char x0, y0, z0, x1, y1, z1;
struct acc_dat acc_xyz;
x0 = 0xff - wiringPiI2CReadReg8(fd, 0x32);
// These read an 8- or 16-bit value from the device register indicated.
x1 = 0xff - wiringPiI2CReadReg8(fd, 0x33);
// Read an 8-bit data from the 0x33 register of the I2C device fd, assign to x1
y0 = 0xff - wiringPiI2CReadReg8(fd, 0x34);
y1 = 0xff - wiringPiI2CReadReg8(fd, 0x35);
z0 = 0xff - wiringPiI2CReadReg8(fd, 0x36);
z1 = 0xff - wiringPiI2CReadReg8(fd, 0x37);
printf(" x0 = %d ",x0);printf("x1 = %d \n",x1);
printf(" y0 = %d ",y0);printf("y1 = %d \n",y1);
printf(" z0 = %d ",z0);printf("z1 = %d \n",z1);
acc_xyz.x = (int)(x1 << 8) + (int)x0;
// Assign values to members of the struct; the value of x consists of x1 (high 8 bits) and x0 (low 8 bits).
acc_xyz.y = (int)(y1 << 8) + (int)y0;
acc_xyz.z = (int)(z1 << 8) + (int)z0;
if(acc_xyz.x > 32767)
{ // Set the value of x as no more than 0x7FFF
acc_xyz.x -= 65536;
}
if(acc_xyz.y > 32767)
{ // Set the value of y as no more than 0x7FFF
acc_xyz.y -= 65536;
}
if(acc_xyz.z > 32767)
{
acc_xyz.z -= 65536;
}
return acc_xyz; // The function ends, return to the acc_xyz struct
}
acc_xyz = adxl345_read_xyz(fd);
// Call the function to read the data collected by the accelerometer module
printf("x: %05d y: %05d z: %05d\n", acc_xyz.x, acc_xyz.y, acc_xyz.z);
// Print the data collected by the accelerometer; %05d means the printed
// data is a 5-bit one, and the empty bit will be replaced by 0.
For Python Users:¶
Step 2: Get into the folder of the code.
cd /home/pi/SunFounder_Super_Kit_V3.0_for_Raspberry_Pi/Python
Step 3: Run.
sudo python3 17_adxl345.py
Code
from I2C import I2C
from time import sleep
class ADXL345(I2C):
ADXL345_ADDRESS = 0x53
ADXL345_REG_DATA_FORMAT = 0x31
ADXL345_REG_DEVID = 0x00 # Device ID
ADXL345_REG_DATAX0 = 0x32 # X-axis data 0 (6 bytes for X/Y/Z)
ADXL345_REG_POWER_CTL = 0x2D # Power-saving features control
ADXL345_DATARATE_0_10_HZ = 0x00
ADXL345_DATARATE_0_20_HZ = 0x01
ADXL345_DATARATE_0_39_HZ = 0x02
ADXL345_DATARATE_0_78_HZ = 0x03
ADXL345_DATARATE_1_56_HZ = 0x04
ADXL345_DATARATE_3_13_HZ = 0x05
ADXL345_DATARATE_6_25HZ = 0x06
ADXL345_DATARATE_12_5_HZ = 0x07
ADXL345_DATARATE_25_HZ = 0x08
ADXL345_DATARATE_50_HZ = 0x09
ADXL345_DATARATE_100_HZ = 0x0A # (default)
ADXL345_DATARATE_200_HZ = 0x0B
ADXL345_DATARATE_400_HZ = 0x0C
ADXL345_DATARATE_800_HZ = 0x0D
ADXL345_DATARATE_1600_HZ = 0x0E
ADXL345_DATARATE_3200_HZ = 0x0F
ADXL345_RANGE_2_G = 0x00 # +/- 2g (default)
ADXL345_RANGE_4_G = 0x01 # +/- 4g
ADXL345_RANGE_8_G = 0x02 # +/- 8g
ADXL345_RANGE_16_G = 0x03 # +/- 16g
ADXL345_SENSITIVITY = 256.00 # 256LSB/g in full resolution
def __init__(self, busnum=1, debug=False):
self.accel = I2C(self.ADXL345_ADDRESS, busnum, debug)
if self.accel.readU8(self.ADXL345_REG_DEVID) == 0xE5:
# Enable the accelerometer
self.accel.write8(self.ADXL345_REG_POWER_CTL, 0x08)
def setRange(self, range):
# Read the data format register to preserve bits. Update the data
# rate, make sure that the FULL-RES bit is enabled for range scaling
format = ((self.accel.readU8(self.ADXL345_REG_DATA_FORMAT) & ~0x0F) |
range | 0x08)
# Write the register back to the IC
self.accel.write8(self.ADXL345_REG_DATA_FORMAT, format)
def getRange(self):
return self.accel.readU8(self.ADXL345_REG_DATA_FORMAT) & 0x03
def setDataRate(self, dataRate):
# Note: The LOW_POWER bits are currently ignored,
# we always keep the device in 'normal' mode
self.accel.write8(self.ADXL345_REG_BW_RATE, dataRate & 0x0F)
def getDataRate(self):
return self.accel.readU8(self.ADXL345_REG_BW_RATE) & 0x0F
# Read the accelerometer
def read(self):
raw = self.accel.readList(self.ADXL345_REG_DATAX0, 6)
#print (raw)
res = []
for i in range(0, 6, 2):
g = raw[i] | (raw[i+1] << 8)
if g > 32767:
g -= 65535
res.append(g/self.ADXL345_SENSITIVITY)
return res
# Simple example prints accelerometer data once per second:
def main():
accel = ADXL345()
accel.setRange(accel.ADXL345_RANGE_16_G)
while True:
x, y, z = accel.read()
print('X: %.2f, Y: %.2f, Z: %.2f'%(x, y, z))
sleep(1) # Output is fun to watch if this is commented out
def destroy():
exit()
if __name__ == '__main__':
try:
main()
except KeyboardInterrupt:
destroy()
Code Explanation
class ADXL345(I2C): # Define a class ADXL345,and the class inheritance is I2C
def __init__(self, busnum=1, debug=False):
# The initialize function of the class, which is run when an instance is created of the class
def setRange(self, range):
# Read the data format register to preserve bits. Update the data rate,
# make sure that the FULL-RES bit is enabled for range scaling:
def getRange(self): # Read an 8-bit data from the device register
def setDataRate(self, dataRate):
# Note: The LOW_POWER bits are currently ignored; we always keep the device in 'normal' mode
def getDataRate(self): # get the rate from the register
def read(self): # Read data from the accelerometer
raw = self.accel.readList(self.ADXL345_REG_DATAX0, 6)
# Read 6 values from the register, respectively equal to the high and low bits of the x, y, and z value
print ( raw)
res = []
for i in range(0, 6, 2):
g = raw[i] | (raw[i+1] << 8)
# Combine the high 8 bits and low 8 bits and obtain a measurement value g = 65535-g
if g > 32767:
g -= 65535
res.append(g)
return res
accel = ADXL345() # Create an instance accel of class ADXL345
x, y, z = accel.read() # accel calls itself to measure x, y, and z and store them in a list.
# Then assign the values measured to x, y, and z.
Now, rotate the acceleration sensor, and you should see the values printed on the screen change.