Bemerkung
Hallo und willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Gemeinschaft auf Facebook! Tauchen Sie tiefer ein in die Welt von Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten.
Warum beitreten?
Expertenunterstützung: Lösen Sie Nachverkaufsprobleme und technische Herausforderungen mit Hilfe unserer Gemeinschaft und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Anleitungen aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und exklusiven Einblicken.
Spezialrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Sind Sie bereit, mit uns zu erkunden und zu erschaffen? Klicken Sie auf [here] und treten Sie heute bei!
Bewegung
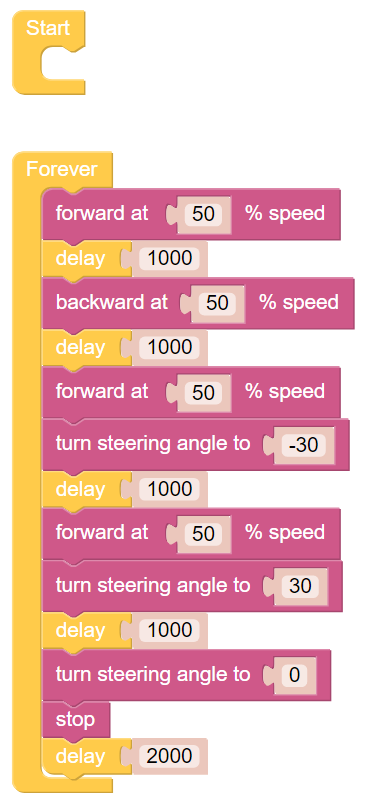
Dieses erste Projekt zeigt Ihnen, wie Sie Bewegungsabläufe für die PiCar-X programmieren können. In diesem Projekt wird das Programm die PiCar-X anweisen, fünf Aktionen in folgender Reihenfolge auszuführen: „Vorwärts“, „Rückwärts“, „Links abbiegen“, „Rechts abbiegen“ und „Stoppen“.
Um die grundlegende Bedienung von Ezblock Studio zu erlernen, lesen Sie bitte die folgenden beiden Abschnitte:
TIPPS

Dieser Block veranlasst die PiCar-X, mit einer Geschwindigkeit vorwärts zu fahren, die sich an einem Prozentsatz der verfügbaren Leistung orientiert. Im untenstehenden Beispiel bedeutet „50“, dass die Geschwindigkeit bei 50 % der Leistung oder Halbgeschwindigkeit liegt.
Dieser Block veranlasst die PiCar-X, mit einer an einem Prozentsatz der verfügbaren Leistung orientierten Geschwindigkeit rückwärts zu fahren.
Dieser Block passt die Ausrichtung der Vorderräder an. Der Bereich liegt bei „-45“ bis „45“. Im untenstehenden Beispiel bedeutet „-30“, dass die Räder um 30° nach links drehen werden.

Dieser Block bewirkt eine zeitliche Verzögerung zwischen den Befehlen, basierend auf Millisekunden. Im untenstehenden Beispiel wartet die PiCar-X 1 Sekunde (1000 Millisekunden) bevor der nächste Befehl ausgeführt wird.

Dieser Block bringt die PiCar-X zum vollständigen Anhalten.
BEISPIEL
Bemerkung
Sie können das Programm entsprechend dem folgenden Bild schreiben. Bitte beachten Sie das Tutorial: How to Create a New Project?.
Oder suchen Sie den Code mit dem gleichen Namen auf der Beispiele-Seite von EzBlock Studio und klicken Sie direkt auf Ausführen oder Bearbeiten.