Nota
Ciao, benvenuto nella Community SunFounder Raspberry Pi & Arduino & ESP32 su Facebook! Approfondisci le tue conoscenze su Raspberry Pi, Arduino e ESP32 insieme ad altri appassionati.
Perché unirsi a noi?
Supporto esperto: Risolvi i problemi post-vendita e le sfide tecniche con l’aiuto della nostra community e del nostro team.
Impara e condividi: Scambia suggerimenti e tutorial per migliorare le tue competenze.
Anteprime esclusive: Accedi in anteprima agli annunci dei nuovi prodotti e alle anticipazioni.
Sconti speciali: Approfitta di sconti esclusivi sui nostri prodotti più recenti.
Promozioni festive e giveaway: Partecipa a giveaway e promozioni festive.
👉 Sei pronto a esplorare e creare con noi? Clicca su [Qui] e unisciti oggi stesso!
2.12 Ventola Intelligente
In questo progetto, realizzeremo una ventola intelligente controllata dalla temperatura utilizzando un termistore, un TA6586, un motore e un modulo di alimentazione. La ventola ruota automaticamente quando viene raggiunta la temperatura impostata.
Componenti necessari
In questo progetto, abbiamo bisogno dei seguenti componenti.
È sicuramente conveniente acquistare un kit completo, ecco il link:
Nome |
ELEMENTI IN QUESTO KIT |
LINK |
|---|---|---|
Kepler Kit |
450+ |
Puoi anche acquistarli separatamente dai link qui sotto.
SN |
COMPONENTE |
QUANTITÀ |
LINK |
|---|---|---|---|
1 |
1 |
||
2 |
Cavo Micro USB |
1 |
|
3 |
1 |
||
4 |
Diversi |
||
5 |
1 |
||
6 |
1 |
||
7 |
1 |
||
8 |
Power Pack |
1 |
|
9 |
Porta batteria |
1 |
|
10 |
1(10KΩ) |
||
11 |
1 |
Cablaggio

Codice
Nota
Puoi fare riferimento all’immagine sottostante per scrivere il codice trascinando e rilasciando.
Importa
2.12_smart_fan.png.pngdal percorsokepler-kit-main\piper. Per tutorial dettagliati, fai riferimento a Importa il Codice.

Dopo aver collegato Pico W, fai clic sul pulsante Start e il codice inizierà a funzionare.
Clicca su CONSOLE, vedrai la temperatura corrente in gradi Celsius.
La ventola inizia a girare quando la temperatura supera i 25 gradi, e smette di girare quando è inferiore a 25 gradi.
Nota
Se il motore continua a girare dopo aver cliccato sul pulsante Stop, è necessario resettare il pin Run sul Pico W collegandolo con un filo al GND e poi scollegarlo per eseguire nuovamente il codice.
Questo avviene perché il motore sta operando con una corrente troppo elevata, il che potrebbe causare la disconnessione del Pico W dal computer.
Come funziona?
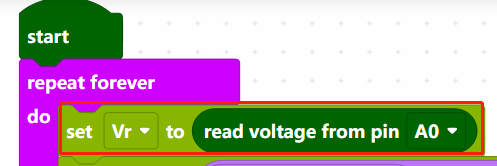
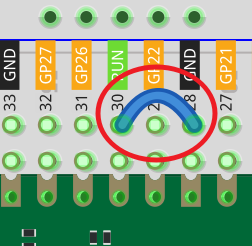
La tensione di A0 (GP26) viene letta e assegnata alla variabile [Vr].
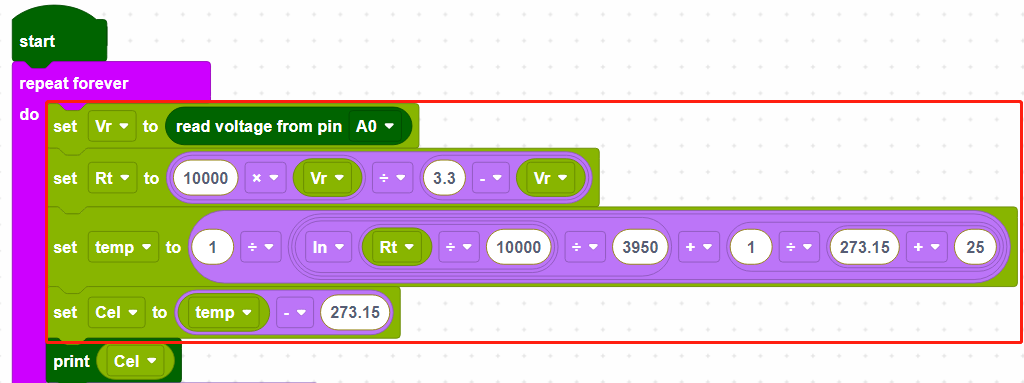
Questi calcoli convertono i valori del termistore in gradi Celsius.
Nota
Ecco la relazione tra la resistenza e la temperatura:
RT =RN expB(1/TK – 1/TN)
RT è la resistenza del termistore NTC alla temperatura TK.
RN è la resistenza del termistore NTC alla temperatura nominale TN. Qui, il valore numerico di RN è 10k.
TK è una temperatura in Kelvin e l’unità è K. Qui, il valore numerico di TK è 273,15 + gradi Celsius.
TN è una temperatura nominale in Kelvin; anche l’unità è K. Qui, il valore numerico di TN è 273,15 + 25.
E B(beta), la costante del materiale del termistore NTC, è anche chiamata indice di sensibilità termica con un valore numerico di 3950.
exp è l’abbreviazione di esponenziale, e la base e è un numero naturale che è approssimativamente uguale a 2,7.
Converti questa formula TK=1/(ln(RT/RN)/B+1/TN) per ottenere la temperatura in Kelvin che meno 273,15 equivale ai gradi Celsius.
Questa relazione è una formula empirica. È accurata solo quando la temperatura e la resistenza sono entro l’intervallo effettivo.
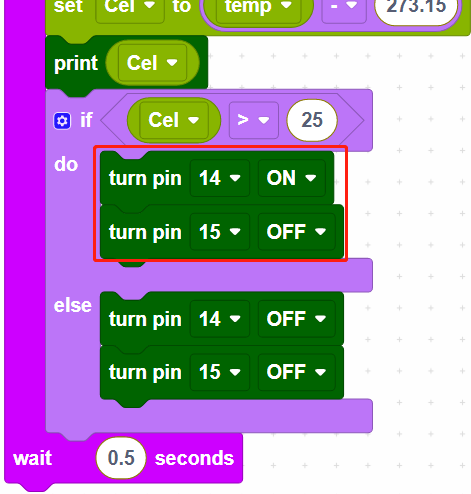
Quando la temperatura è superiore a 25 gradi Celsius, imposta GP14 su ON e GP15 su OFF per far ruotare il motore, o puoi invertire i loro livelli. Quando la temperatura è inferiore a 25 gradi Celsius, imposta entrambi i pin GP14 e GP15 su LOW per fermare il motore.