Nota
Ciao, benvenuto nella Community SunFounder Raspberry Pi & Arduino & ESP32 su Facebook! Approfondisci le tue conoscenze su Raspberry Pi, Arduino e ESP32 insieme ad altri appassionati.
Perché Unirsi a Noi?
Supporto Esperto: Risolvi problemi post-vendita e sfide tecniche con l’aiuto della nostra community e del nostro team.
Impara e Condividi: Scambia suggerimenti e tutorial per migliorare le tue competenze.
Anteprime Esclusive: Accedi in anteprima agli annunci di nuovi prodotti e alle anticipazioni esclusive.
Sconti Speciali: Approfitta di sconti esclusivi sui nostri prodotti più recenti.
Promozioni Festive e Giveaway: Partecipa a giveaway e promozioni festive.
👉 Sei pronto a esplorare e creare con noi? Clicca su [Qui] e unisciti oggi stesso!
2.6 Serbatoio d’Acqua Intelligente
In questo progetto, utilizziamo un modulo sensore di livello dell’acqua e un servo per simulare un serbatoio d’acqua intelligente. Il sensore di livello dell’acqua è fissato all’interno del serbatoio per misurare il livello dell’acqua e, quando il livello è al di sotto di una soglia, la valvola controllata dal servo si apre per consentire l’ingresso dell’acqua.
Componenti Necessari
In questo progetto, abbiamo bisogno dei seguenti componenti.
È sicuramente conveniente acquistare un kit completo, ecco il link:
Nome |
ELEMENTI IN QUESTO KIT |
LINK |
|---|---|---|
Kepler Kit |
450+ |
Puoi anche acquistarli separatamente dai link qui sotto.
SN |
COMPONENTE |
QUANTITÀ |
LINK |
|---|---|---|---|
1 |
1 |
||
2 |
Cavo Micro USB |
1 |
|
3 |
1 |
||
4 |
Diversi |
||
5 |
1 |
||
6 |
1 |
Cablaggio
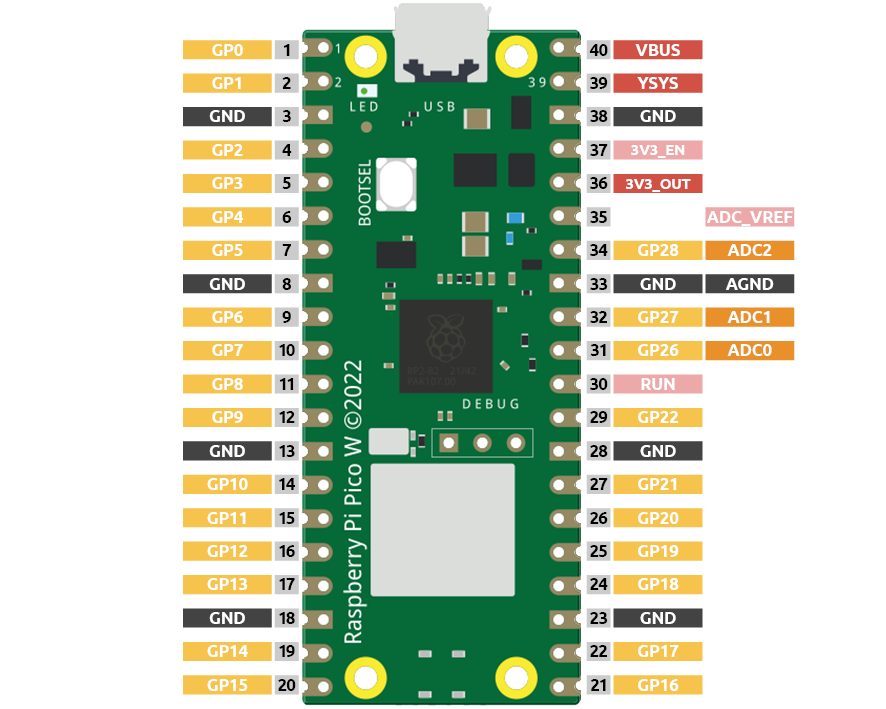
Il Pico W ha tre pin GPIO che possono utilizzare l’ingresso analogico: GP26, GP27, GP28, ovvero i canali analogici 0, 1 e 2. Inoltre, esiste un quarto canale analogico, collegato al sensore di temperatura integrato, che non verrà introdotto qui.

Il pin S del sensore di livello dell’acqua è collegato a GP26 (A0), il pin + a VBUS e il pin - a GND.
Il filo arancione (segnale) del servo è collegato a GP15, il filo rosso (alimentazione) è collegato a VBUS e il filo marrone (terra) è collegato a GND.
Codice
Nota
Puoi fare riferimento all’immagine sottostante per scrivere il codice trascinando e rilasciando i blocchi.
Importa
2.6_water_tank.pngdal percorsokepler-kit-main\piper. Per tutorial dettagliati, fai riferimento a Importa il Codice.

Dopo aver collegato Pico W, fai clic sul pulsante Start e il codice inizierà a funzionare. Quando il livello dell’acqua è inferiore a 1/3 del sensore di livello dell’acqua, il servo ruota a 180 gradi per simulare l’apertura dell’ingresso; quando il livello dell’acqua è superiore a 1/3 del sensore di livello dell’acqua, il servo ruota a 0 gradi per imitare la chiusura dell’ingresso.
Come Funziona?
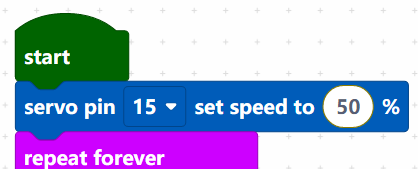
Imposta la velocità di rotazione del pin15 (servo) al 15%.
[servo pin() set speed to ()%]: Utilizzato per impostare la velocità di rotazione del servo, l’intervallo è 0%~100%.

Legge il valore del pin A0 e lo memorizza nella variabile [water_level].
[set (water_level) to]: Utilizzato per impostare il valore della variabile, è necessario creare la variabile dal menu Variables.
[read voltage from pin ()]: Utilizzato per leggere la tensione dei pin analogici (A0~A2), l’intervallo è 0 ~ 3.3V.
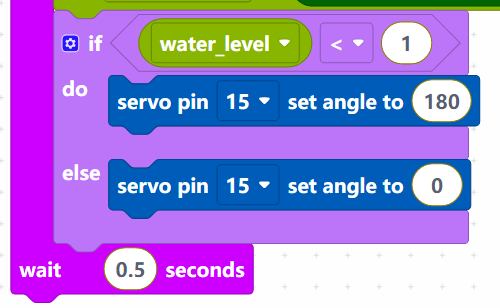
Imposta la soglia di tensione su 1. Quando la tensione del sensore di livello dell’acqua è inferiore a 1, lascia che il servo ruoti alla posizione di 180°, altrimenti ruota alla posizione di 0°.
[servo pin () set angle to ()]: Imposta l’angolo del pin del servo, l’intervallo è 0 ~ 180°.