注釈
こんにちは、SunFounder Raspberry Pi & Arduino & ESP32 愛好家コミュニティ(Facebook)へようこそ! Raspberry Pi、Arduino、ESP32 を仲間とともにさらに深く探求しましょう。
参加する理由
専門的な支援: 購入後の問題や技術的な課題を、コミュニティとチームが解決をサポートします。
学びと共有: 技術的なヒントや作例を共有し、技能を高めます。
限定先行情報: 新製品の発表やプレビューを早く入手できます。
特別割引: 最新製品の特別割引を受けられます。
季節イベントと景品企画: 季節ごとのイベントや景品企画に参加できます。
👉 一緒に創造と探求を始めましょう。[ここ] をクリックして今すぐ参加!
2.1.6 ジョイスティック(MCP3008)
注釈
キットのバージョンによって ADC0834 または MCP3008 が含まれています。 該当する方の説明を参照してください。
はじめに
このプロジェクトでは、ジョイスティックの動作を学びます。 ジョイスティックを操作し、その結果を画面に表示します。
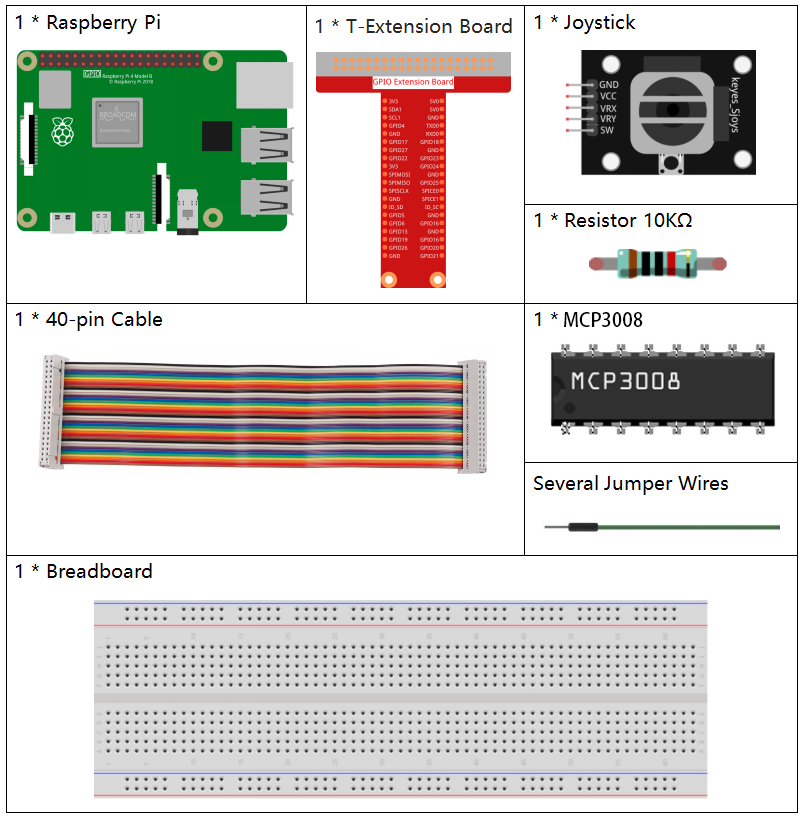
必要な部品
このプロジェクトで使用する部品は以下の通りです。
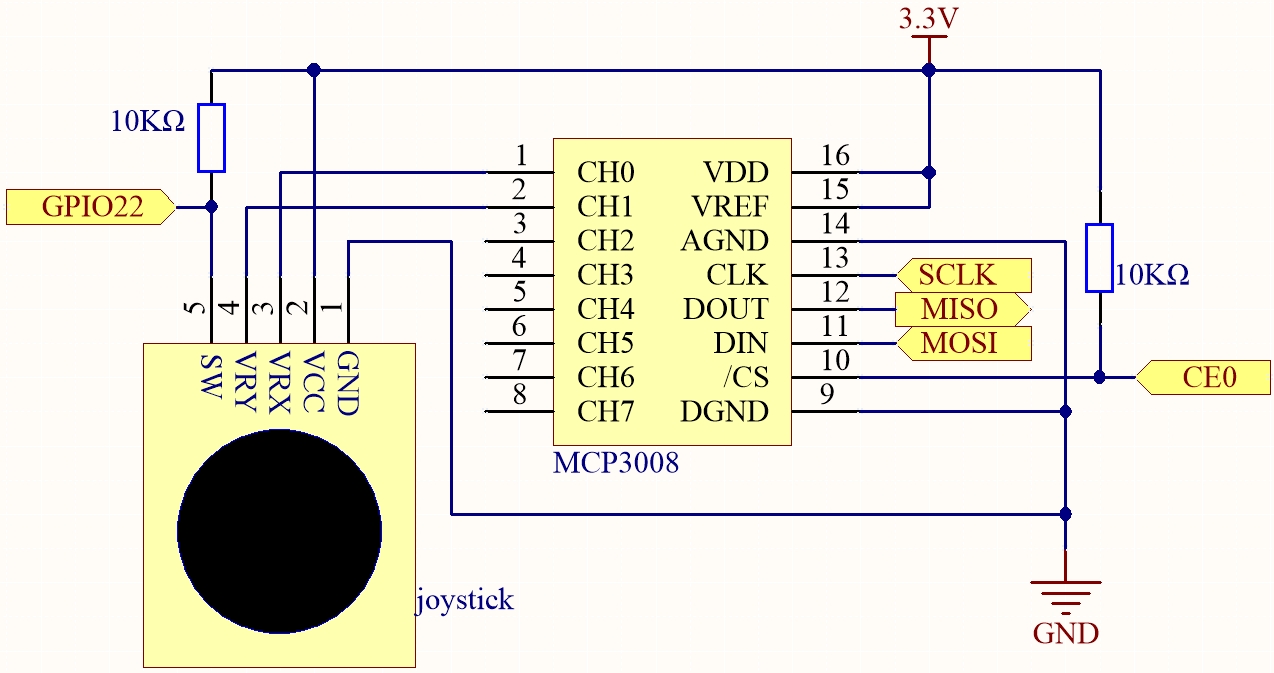
回路図
ジョイスティックのデータを読み取る場合、軸ごとに違いがあります。 X軸とY軸のデータはアナログ信号であり、MCP3008 を使ってアナログ値をデジタル値に変換する必要があります。 Z軸のデータはデジタル信号なので、GPIO から直接読み取ることも、ADC を使って読み取ることもできます。
T-Board 名 |
物理ピン |
WiringPi |
BCM |
|---|---|---|---|
SPICE0 |
pin24 |
10 |
8 |
SPIMOSI |
pin19 |
12 |
10 |
SPIMISO |
pin21 |
13 |
9 |
SPISCLK |
pin23 |
14 |
11 |
GPIO22 |
pin15 |
3 |
22 |
実験手順
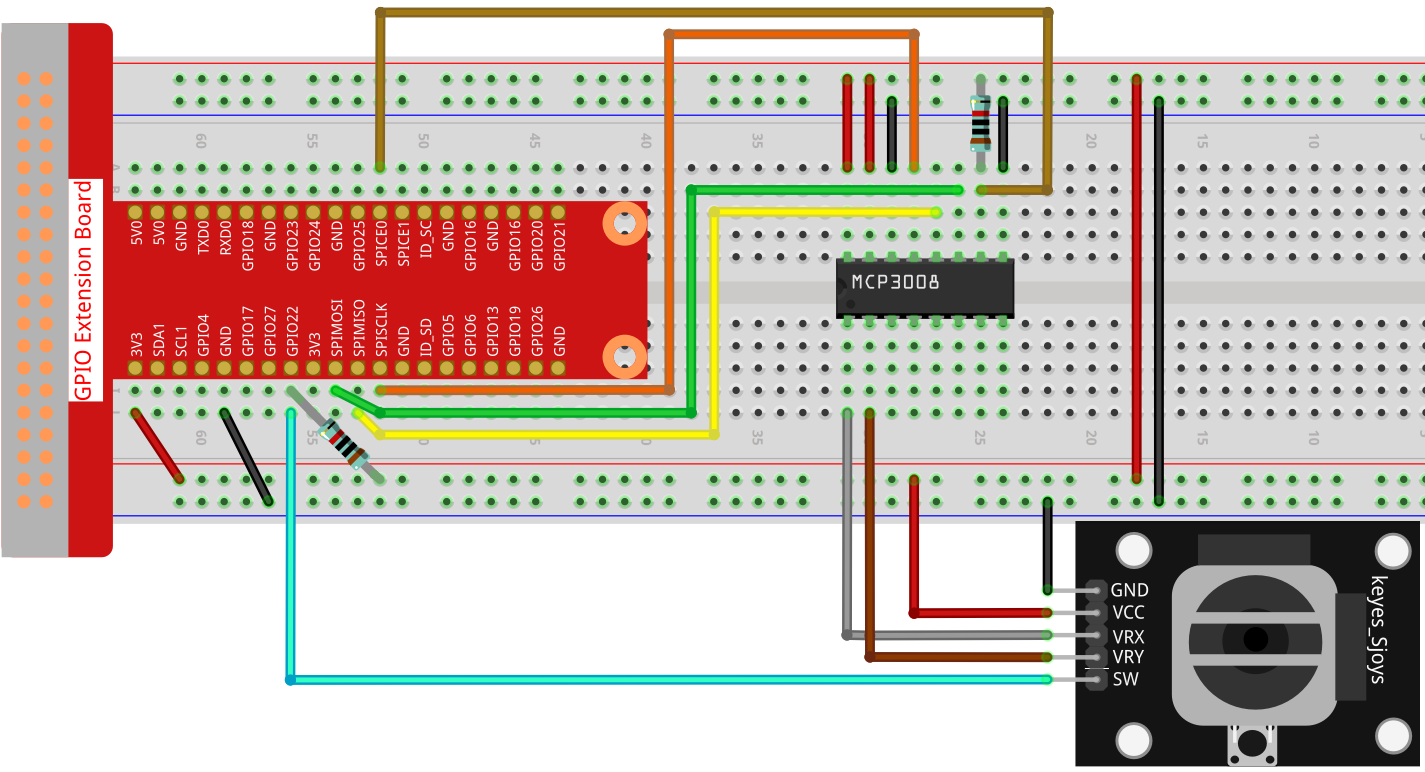
手順1: 回路を組み立てます。
手順2: SPI インターフェースを設定し、 spidev ライブラリをインストールします(詳しくは SPI 設定 を参照)。すでに完了している場合はこの手順を省略できます。
手順3: コードのフォルダへ移動します。
cd ~/davinci-kit-for-raspberry-pi/python-pi5
手順4: 実行します。
sudo python3 2.1.6-2_Joystick_zero.py
コードを実行後、ジョイスティックを動かすと、x、y、Btn の値が画面に表示されます。
警告
RuntimeError: Cannot determine SOC peripheral base address というエラーが出た場合は 「gpiozero」が動作しない場合。 を参照してください。
コード
#!/usr/bin/env python3
from gpiozero import Button
import spidev
import time
# GPIO22(ジョイスティック SW ピン)に接続されたボタンを初期化
BtnPin = Button(22)
# MCP3008 との SPI 通信を初期化
spi = spidev.SpiDev()
spi.open(0, 0) # バス0、デバイス CE0 を開く
spi.max_speed_hz = 1000000 # SPI 通信速度を 1MHz に設定
def read_adc(channel):
"""
指定した MCP3008 チャンネル (0–7) からアナログ値を読み取る
:param channel: ADC チャンネル番号 (0–7)
:return: 10ビット整数値 (0–1023)
"""
if channel < 0 or channel > 7:
return -1
adc = spi.xfer2([1, (8 + channel) << 4, 0])
value = ((adc[1] & 0x03) << 8) | adc[2]
return value
try:
# ジョイスティックの値とボタン状態を読み取り表示するメインループ
while True:
# CH0 と CH1 から X と Y の値を読み取る
x_val = read_adc(0) # VRX が CH0 に接続
y_val = read_adc(1) # VRY が CH1 に接続
# ジョイスティックのボタン状態(SW ピン)を読み取る
Btn_val = BtnPin.value # 0 = 押下, 1 = 解放
# 読み取った値を表示
print('X: %d Y: %d Btn: %d' % (x_val, y_val, Btn_val))
# 次の読み取りまで 0.2 秒待機
time.sleep(0.2)
# Ctrl+C 割り込み時の終了処理
except KeyboardInterrupt:
spi.close()
コード解説
必要なライブラリをインポートします。
gpiozero.Button— ジョイスティックのボタン(SW ピン)のデジタル状態を読み取ります。spidev— MCP3008 ADC チップとの SPI 通信を行います。time— 読み取り間隔の制御に使用します。
from gpiozero import Button import spidev import time
GPIO22 に接続されたボタンを初期化し、SPI 通信(バス0、チップセレクト0)を設定します。通信速度は 1MHz にします。
BtnPin = Button(22) spi = spidev.SpiDev() spi.open(0, 0) spi.max_speed_hz = 1000000
read_adc(channel)関数を定義し、指定チャンネル (0–7) からアナログ値を読み取ります。SPI プロトコルで3バイト送信し、10ビットの値を返します。def read_adc(channel): if channel < 0 or channel > 7: return -1 adc = spi.xfer2([1, (8 + channel) << 4, 0]) value = ((adc[1] & 0x03) << 8) | adc[2] return value
メインループでは、VRX(CH0)と VRY(CH1)からアナログ値を読み取り、ジョイスティックボタンの状態も取得します。 値は0.2秒ごとに表示され、Ctrl+C が押されると SPI 通信を安全に終了します。
try: while True: x_val = read_adc(0) y_val = read_adc(1) Btn_val = BtnPin.value print('X: %d Y: %d Btn: %d' % (x_val, y_val, Btn_val)) time.sleep(0.2) except KeyboardInterrupt: spi.close()