Nota
Ciao, benvenuto nella Community di appassionati di SunFounder Raspberry Pi & Arduino & ESP32 su Facebook! Approfondisci Raspberry Pi, Arduino ed ESP32 con altri appassionati.
Perché unirsi?
Supporto esperto: Risolvi problemi post-vendita e sfide tecniche con l’aiuto della nostra community e del nostro team.
Impara e condividi: Scambia suggerimenti e tutorial per migliorare le tue competenze.
Anteprime esclusive: Ottieni accesso anticipato agli annunci di nuovi prodotti e alle anteprime.
Sconti speciali: Godi di sconti esclusivi sui nostri prodotti più recenti.
Promozioni e giveaway festivi: Partecipa a giveaway e promozioni festive.
👉 Pronto a esplorare e creare con noi? Clicca [Qui] e unisciti oggi stesso!
3.1.5 Indicatore di batteria (MCP3008)
Nota
A seconda della versione del tuo kit, identifica se hai ADC0834 o MCP3008 e procedi con la sezione corrispondente.
Introduzione
In questo progetto realizzeremo un dispositivo indicatore di batteria in grado di mostrare visivamente il livello della batteria sul LED Bargraph.
Avvertimento
Non utilizzare componenti della batteria che superano i 3,3V per evitare sovraccarichi che potrebbero danneggiare il chip o il Raspberry Pi.
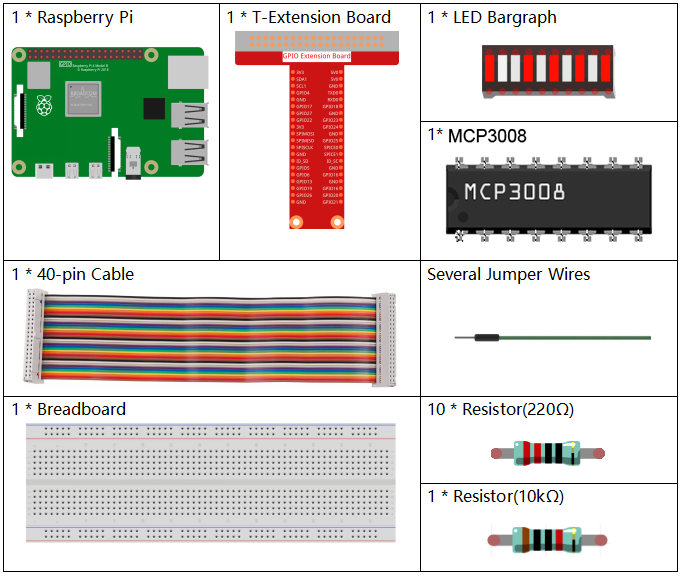
Componenti richiesti
In questo progetto, abbiamo bisogno dei seguenti componenti.
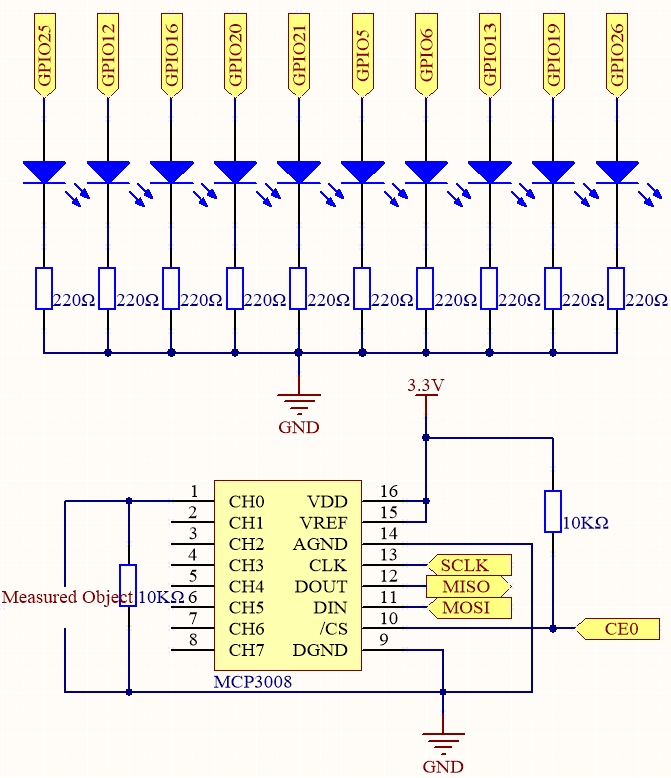
Schema elettrico
T-Board Name |
physical |
wiringPi |
BCM |
SPICE0 |
Pin 24 |
10 |
8 |
SPIMOSI |
Pin 19 |
12 |
10 |
SPIMISO |
Pin 21 |
13 |
9 |
SPISCLK |
Pin 23 |
14 |
11 |
GPIO25 |
Pin 22 |
6 |
25 |
GPIO12 |
Pin 32 |
26 |
12 |
GPIO16 |
Pin 36 |
27 |
16 |
GPIO20 |
Pin 38 |
28 |
20 |
GPIO21 |
Pin 40 |
29 |
21 |
GPIO5 |
Pin 29 |
21 |
5 |
GPIO6 |
Pin 31 |
22 |
6 |
GPIO13 |
Pin 33 |
23 |
13 |
GPIO19 |
Pin 35 |
24 |
19 |
GPIO26 |
Pin 37 |
25 |
26 |
Procedure sperimentali
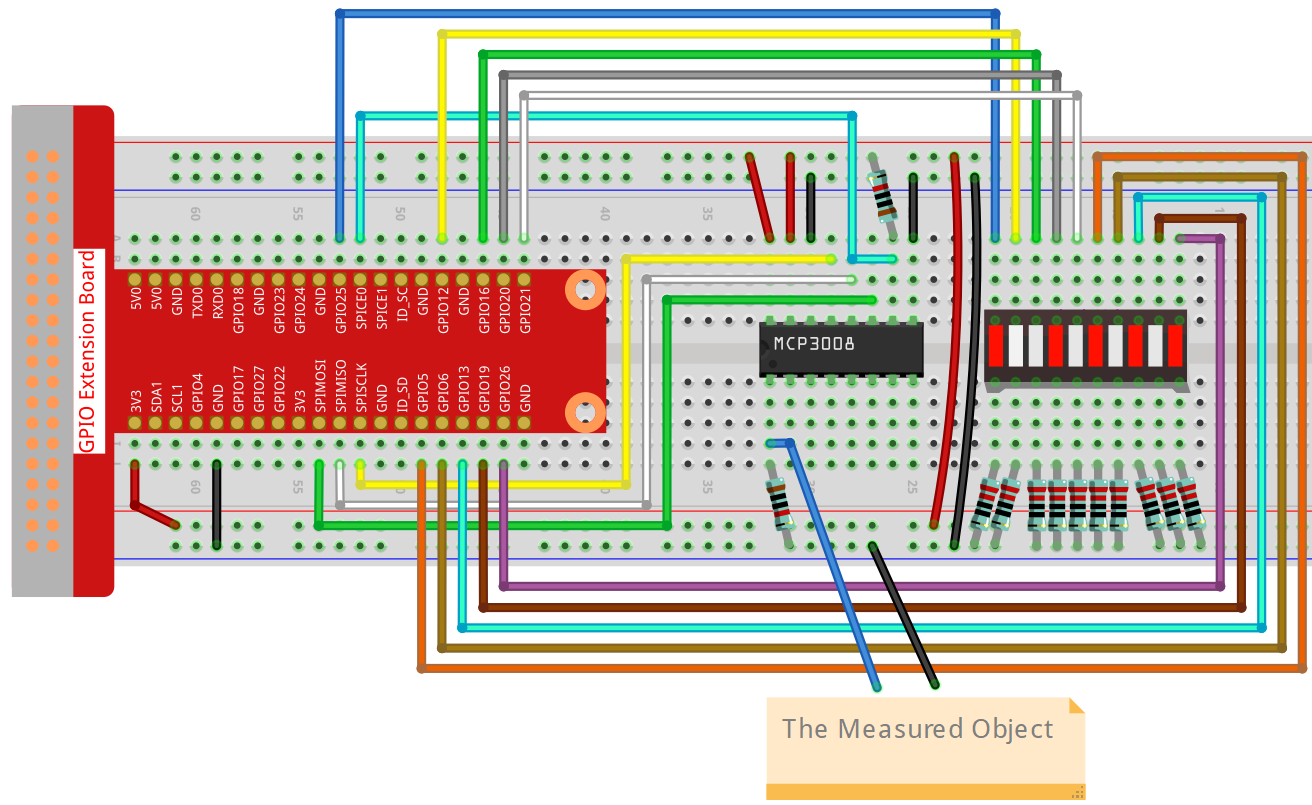
Passo 1: Montare il circuito.
Passo 2: Configurare l’interfaccia SPI e installare la libreria spidev (vedi Configurazione SPI per istruzioni dettagliate). Se hai già completato questi passaggi, puoi saltarli.
Passo 3: Accedere alla cartella del codice.
cd ~/davinci-kit-for-raspberry-pi/python-pi5
Passo 4: Eseguire il file.
sudo python3 3.1.5-2_Battery_indicator_zero.py
Dopo aver avviato il programma, collega un filo separato dal 3° pin del MCP3008 e un filo dal GND, e collegali rispettivamente ai due poli di una batteria. Vedrai che il LED corrispondente sul LED Bargraph si illumina per mostrare il livello di carica (intervallo di misura: 0-5V).
Avvertimento
Se appare l’errore RuntimeError: Cannot determine SOC peripheral base address, fare riferimento a Se gpiozero non funziona.
Codice
Nota
Puoi Modificare/Reimpostare/Copiare/Eseguire/Interrompere il codice qui sotto. Ma prima devi accedere al percorso del codice sorgente, come davinci-kit-for-raspberry-pi/python-pi5. Dopo aver modificato il codice, puoi eseguirlo direttamente per vedere l’effetto.
#!/usr/bin/env python3
import LCD1602
from gpiozero import LED, Buzzer, Button
import spidev
import time
import math
# Initialize joystick button, buzzer, and LED
Joy_BtnPin = Button(22) # GPIO22, Pin15
buzzPin = Buzzer(23) # GPIO23, Pin16
ledPin = LED(24) # GPIO24, Pin18
# Set initial upper temperature threshold
upperTem = 40
# Initialize SPI for MCP3008 (Bus 0, CE0 -> GPIO8 / Pin24)
spi = spidev.SpiDev()
spi.open(0, 0)
spi.max_speed_hz = 1000000 # 1 MHz
# Initialize LCD (I2C address 0x27, backlight on)
LCD1602.init(0x27, 1)
def read_adc(channel):
"""
Read analog value from MCP3008
"""
if channel < 0 or channel > 7:
return -1
adc = spi.xfer2([1, (8 + channel) << 4, 0])
value = ((adc[1] & 0x03) << 8) | adc[2]
return value
def get_joystick_value():
"""
Reads the joystick values and returns a change value based on the joystick's position.
"""
x_val = read_adc(1)
y_val = read_adc(2)
if x_val > 800:
return 1
elif x_val < 200:
return -1
elif y_val > 800:
return -10
elif y_val < 200:
return 10
else:
return 0
def upper_tem_setting():
"""
Adjusts and displays the upper temperature threshold on the LCD.
"""
global upperTem
LCD1602.write(0, 0, 'Upper Adjust: ')
change = int(get_joystick_value())
upperTem += change
strUpperTem = str(upperTem)
LCD1602.write(0, 1, strUpperTem)
LCD1602.write(len(strUpperTem), 1, ' ')
time.sleep(0.1)
def temperature():
"""
Reads the current temperature from the sensor and returns it in Celsius.
"""
analogVal = read_adc(0)
Vr = 3.3 * analogVal / 1023.0 # Voltage across the fixed resistor
if Vr == 0:
return 0 # Prevent division by zero
Rt = 10000.0 * (3.3 - Vr) / Vr # Adjusted formula: thermistor voltage is (3.3 - Vr)
temp = 1 / (((math.log(Rt / 10000.0)) / 3950.0) + (1 / (273.15 + 25.0)))
Cel = temp - 273.15
return round(Cel, 2)
def monitoring_temp():
"""
Monitors and displays the current temperature and upper temperature threshold.
Activates buzzer and LED if the temperature exceeds the upper limit.
"""
global upperTem
Cel = temperature()
LCD1602.write(0, 0, 'Temp: ')
LCD1602.write(0, 1, 'Upper: ')
LCD1602.write(6, 0, str(Cel))
LCD1602.write(7, 1, str(upperTem))
time.sleep(0.1)
if Cel >= upperTem:
buzzPin.on()
ledPin.on()
else:
buzzPin.off()
ledPin.off()
# Main execution loop
try:
lastState = 1
stage = 0
while True:
currentState = Joy_BtnPin.value
if currentState == 1 and lastState == 0:
stage = (stage + 1) % 2
time.sleep(0.1)
LCD1602.clear()
lastState = currentState
if stage == 1:
upper_tem_setting()
else:
monitoring_temp()
except KeyboardInterrupt:
LCD1602.clear()
spi.close()
Spiegazione del codice
Questo programma Python viene eseguito su un Raspberry Pi. Utilizza un convertitore analogico-digitale MCP3008 per leggere i dati di temperatura da un sensore analogico. Un joystick viene utilizzato per regolare la soglia di temperatura e un display LCD1602 mostra la temperatura corrente e la soglia impostata. Un buzzer e un LED si attivano quando la temperatura supera la soglia.
Importazione delle librerie richieste
#!/usr/bin/env python3 import RPi.GPIO as GPIO import spidev import time import math import LCD1602
RPi.GPIOviene utilizzato per controllare i pin GPIO.spidevcomunica con l’MCP3008 tramite SPI.mathè necessario per i calcoli di conversione della temperatura.LCD1602controlla il display LCD.
Configurazione dei GPIO
JOY_BTN_PIN = 22 BUZZER_PIN = 23 LED_PIN = 24 GPIO.setmode(GPIO.BCM) GPIO.setup(JOY_BTN_PIN, GPIO.IN, pull_up_down=GPIO.PUD_UP) GPIO.setup(BUZZER_PIN, GPIO.OUT) GPIO.setup(LED_PIN, GPIO.OUT)
Assegna i pin per il pulsante del joystick, il buzzer e il LED utilizzando la numerazione BCM.
Configura il pulsante del joystick con una resistenza di pull-up e imposta i pin di uscita inizialmente su LOW.
Inizializzazione di SPI e LCD
upperTem = 40 # Soglia di temperatura predefinita spi = spidev.SpiDev() spi.open(0, 0) spi.max_speed_hz = 1000000 # 1 MHz LCD1602.init(0x27, 1)
Inizializza la comunicazione SPI per l’MCP3008.
Configura l’LCD1602 I2C all’indirizzo
0x27.
Lettura del canale ADC
def read_adc(channel): if channel < 0 or channel > 7: return -1 adc = spi.xfer2([1, (8 + channel) << 4, 0]) value = ((adc[1] & 0x03) << 8) | adc[2] return value
Invia comandi SPI all’MCP3008 per leggere la tensione analogica dal canale selezionato (0–7).
Restituisce un risultato a 10 bit compreso tra 0 e 1023.
Lettura della direzione del joystick
def get_joystick_value(): x_val = read_adc(1) y_val = read_adc(2) if x_val > 800: return 1 elif x_val < 200: return -1 elif y_val > 800: return -10 elif y_val < 200: return 10 else: return 0
Legge i movimenti orizzontali (X) e verticali (Y) del joystick e li traduce in una variazione della soglia:
Su/Giù modifica di ±10.
Sinistra/Destra modifica di ±1.
Regolazione della soglia di temperatura
def upper_tem_setting(): global upperTem LCD1602.write(0, 0, 'Upper Adjust: ') change = int(get_joystick_value()) upperTem += change strUpperTem = str(upperTem) LCD1602.write(0, 1, strUpperTem) LCD1602.write(len(strUpperTem), 1, ' ') time.sleep(0.1)
Permette all’utente di modificare la soglia
upperTemtramite il joystick.Aggiorna il display LCD per mostrare il valore attuale della soglia.
Calcolo della temperatura dal sensore analogico
def temperature(): analogVal = read_adc(0) Vr = 3.3 * analogVal / 1023.0 if Vr == 0: return 0 Rt = 10000.0 * (3.3 - Vr) / Vr tempK = 1.0 / (((math.log(Rt / 10000.0)) / 3950.0) + (1.0 / (273.15 + 25.0))) Cel = tempK - 273.15 return round(Cel, 2)
Converte la lettura di tensione in resistenza, poi utilizza l’equazione di Steinhart-Hart per calcolare la temperatura in gradi Celsius.
Modalità di monitoraggio
def monitoring_temp(): global upperTem Cel = temperature() LCD1602.write(0, 0, 'Temp: ') LCD1602.write(0, 1, 'Upper: ') LCD1602.write(6, 0, str(Cel)) LCD1602.write(7, 1, str(upperTem)) time.sleep(0.1) if Cel >= upperTem: GPIO.output(BUZZER_PIN, GPIO.HIGH) GPIO.output(LED_PIN, GPIO.HIGH) else: GPIO.output(BUZZER_PIN, GPIO.LOW) GPIO.output(LED_PIN, GPIO.LOW)
Mostra sul display la temperatura corrente e la soglia impostata.
Attiva il buzzer e il LED se la temperatura corrente supera la soglia.
Ciclo principale
try: lastState = GPIO.input(JOY_BTN_PIN) stage = 0 while True: currentState = GPIO.input(JOY_BTN_PIN) if currentState == GPIO.HIGH and lastState == GPIO.LOW: stage = (stage + 1) % 2 time.sleep(0.1) LCD1602.clear() lastState = currentState if stage == 1: upper_tem_setting() else: monitoring_temp()
Utilizza la pressione del pulsante del joystick per passare da:
stage 0: monitoraggio della temperaturastage 1: regolazione della soglia
Pulizia all’uscita
except KeyboardInterrupt: pass finally: LCD1602.clear() GPIO.cleanup() spi.close()
Garantisce il ripristino dei GPIO e dell’LCD alla chiusura del programma (es. con Ctrl+C).