Nota
Ciao, benvenuto nella Community Facebook degli appassionati di Raspberry Pi, Arduino e ESP32 di SunFounder! Approfondisci il mondo di Raspberry Pi, Arduino ed ESP32 insieme ad altri appassionati.
Perché unirti?
Supporto esperto: Risolvi problemi post-vendita e sfide tecniche con l’aiuto della nostra community e del nostro team.
Impara e condividi: Scambia suggerimenti e tutorial per migliorare le tue competenze.
Anteprime esclusive: Ottieni accesso anticipato a nuovi annunci di prodotti e anteprime.
Sconti speciali: Goditi sconti esclusivi sui nostri prodotti più recenti.
Promozioni festive e giveaway: Partecipa a giveaway e promozioni durante le festività.
👉 Pronto a esplorare e creare con noi? Clicca [Qui] e unisciti oggi stesso!
3.1.4 Ventilatore Intelligente (MCP3008)
Nota
A seconda della versione del kit, identifica se hai ADC0834 o MCP3008 e procedi con la sezione corrispondente.
Introduzione
In questo progetto utilizzeremo motori, pulsanti e termistori per realizzare un ventilatore intelligente manuale + automatico con velocità regolabile.
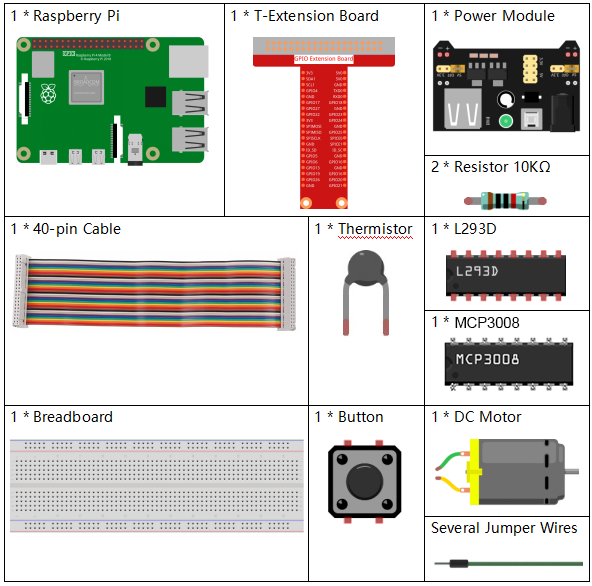
Componenti necessari
In questo progetto, avremo bisogno dei seguenti componenti.
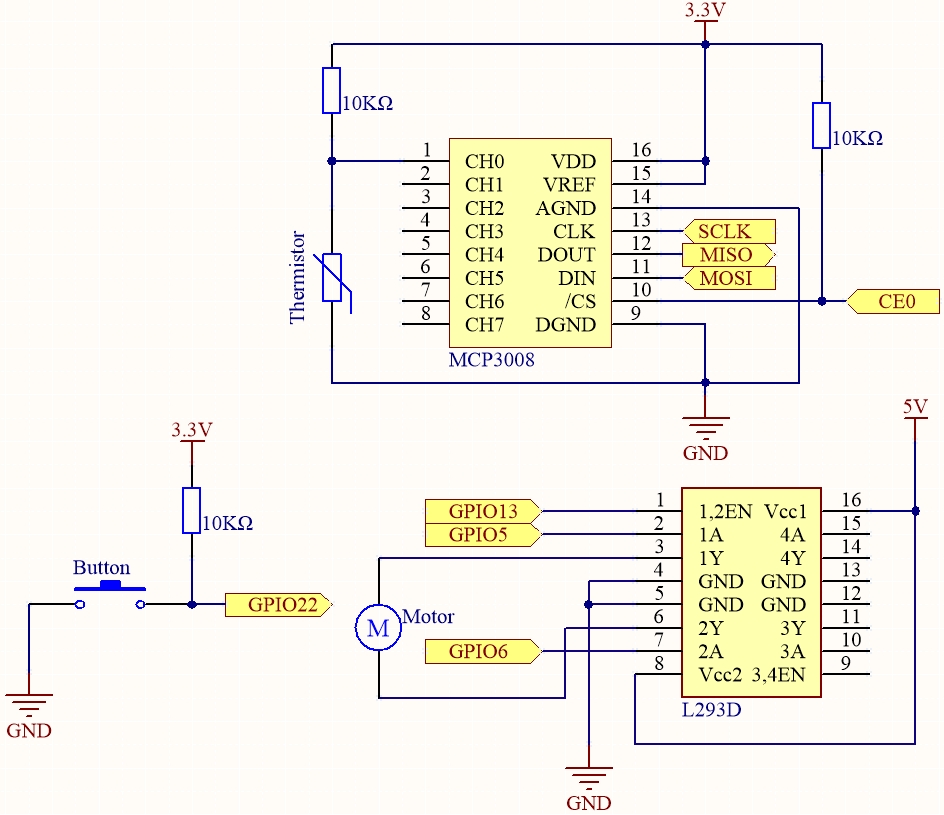
Schema elettrico
T-Board Name |
physical |
wiringPi |
BCM |
SPICE0 |
Pin 24 |
10 |
8 |
SPIMOSI |
Pin 19 |
12 |
10 |
SPIMISO |
Pin 21 |
13 |
9 |
SPISCLK |
Pin 23 |
14 |
11 |
GPIO22 |
Pin 15 |
3 |
22 |
GPIO5 |
Pin 29 |
21 |
5 |
GPIO6 |
Pin 31 |
22 |
6 |
GPIO13 |
Pin 33 |
23 |
13 |
Procedure sperimentali
Passo 1: Montare il circuito.
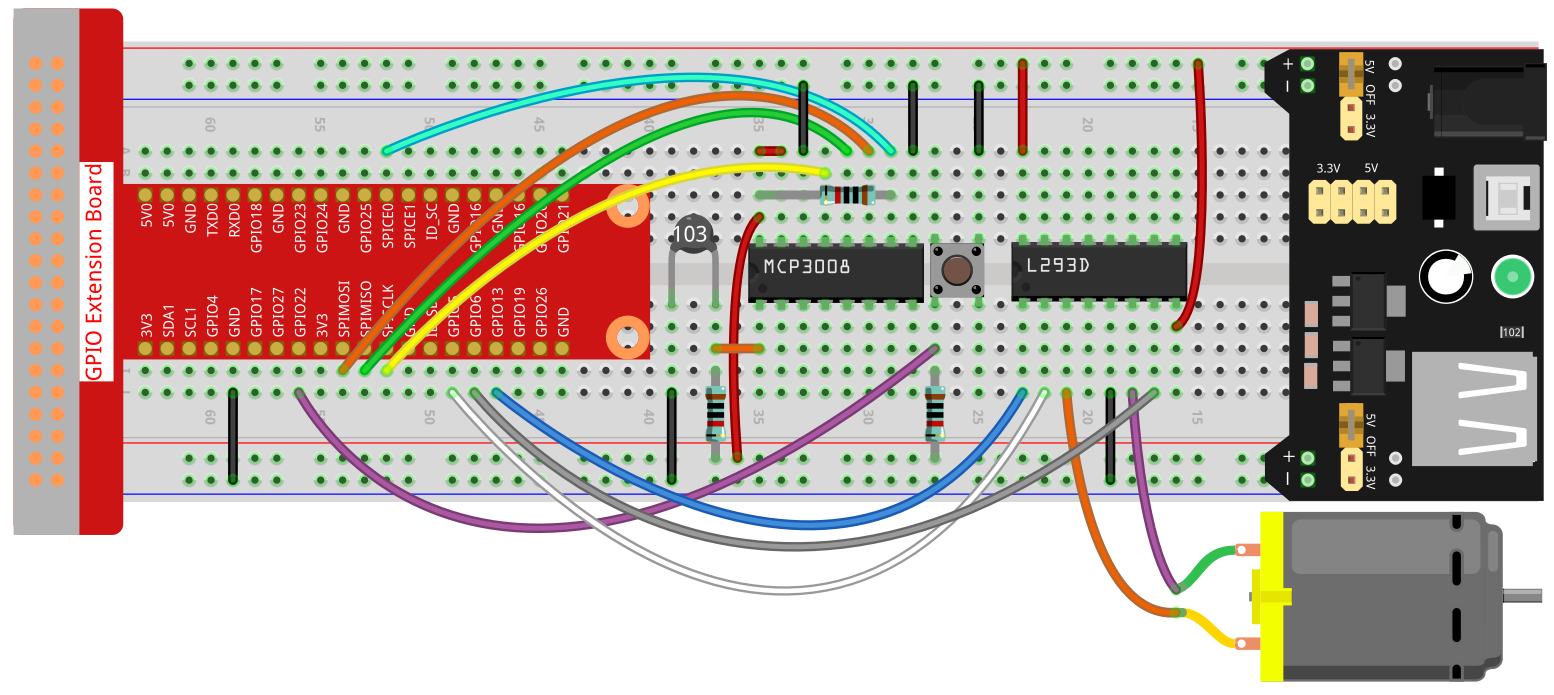
Nota
Il modulo di alimentazione può utilizzare una batteria da 9V con il connettore per batteria da 9V incluso nel kit.

Passo 2: Configurare l’interfaccia SPI e installare la libreria spidev (vedi Configurazione SPI per istruzioni dettagliate). Se hai già completato questi passaggi, puoi saltarli.
Passo 3: Accedere alla cartella del codice.
cd ~/davinci-kit-for-raspberry-pi/python-pi5
Passo 4: Eseguire.
sudo python3 3.1.4-2_SmartFan_zero.py
Quando il codice viene eseguito, avvia il ventilatore premendo il pulsante. Ogni volta che premi, il livello di velocità aumenta o diminuisce di 1 grado. Ci sono 5 livelli di velocità: 0~4. Quando si imposta al 4o livello e si preme di nuovo il pulsante, il ventilatore si ferma con velocità 0.
Quando la temperatura aumenta o diminuisce di oltre 2℃, la velocità viene regolata automaticamente aumentando o diminuendo di 1 livello.
Codice
Nota
Puoi Modificare/Reimpostare/Copiare/Eseguire/Fermare il codice qui sotto. Prima, però, devi andare nel percorso del codice sorgente, ad esempio davinci-kit-for-raspberry-pi/python-pi5. Dopo aver modificato il codice, puoi eseguirlo direttamente per vedere l’effetto.
#!/usr/bin/env python3
from gpiozero import Motor, Button
from time import sleep
import spidev
import math
# Inizializza SPI per MCP3008
spi = spidev.SpiDev()
spi.open(0, 0) # Bus 0, CE0 (GPIO8 / pin fisico 24)
spi.max_speed_hz = 1000000 # 1 MHz
# Inizializza i pin GPIO per pulsante e controllo motore
BtnPin = Button(22) # GPIO22 (pin fisico 15)
motor = Motor(forward=5, backward=6, enable=13) # GPIO5, GPIO6, GPIO13
# Variabili per livello velocità motore e temperature
level = 0
currentTemp = 0
markTemp = 0
def read_adc(channel):
"""
Legge il valore analogico dal canale MCP3008 (0–7).
"""
if channel < 0 or channel > 7:
return -1
adc = spi.xfer2([1, (8 + channel) << 4, 0])
value = ((adc[1] & 0x03) << 8) | adc[2]
return value
def temperature():
"""
Legge e calcola la temperatura corrente dal sensore.
Ritorna:
float: Temperatura attuale in gradi Celsius.
"""
analogVal = read_adc(0) # Termistore connesso a CH0
Vr = 3.3 * analogVal / 1023.0 # Per sistema a 3.3V
Rt = 10000.0 * Vr / (3.3 - Vr)
temp = 1 / (((math.log(Rt / 10000.0)) / 3950.0) + (1 / (273.15 + 25.0)))
Cel = temp - 273.15
return Cel
def motor_run(level):
"""
Regola la velocità del motore in base al livello specificato.
Args:
level (int): Livello di velocità desiderato.
Returns:
int: Livello di velocità regolato.
"""
if level == 0:
motor.stop()
return 0
if level >= 4:
level = 4
motor.forward(speed=float(level / 4))
return level
def changeLevel():
"""
Cambia il livello di velocità quando si preme il pulsante e aggiorna la temperatura di riferimento.
"""
global level, currentTemp, markTemp
print("Pulsante premuto")
level = (level + 1) % 5
markTemp = currentTemp
# Associa l’evento di pressione del pulsante alla funzione changeLevel
BtnPin.when_pressed = changeLevel
def main():
"""
Funzione principale per monitorare e rispondere ai cambiamenti di temperatura.
"""
global level, currentTemp, markTemp
markTemp = temperature()
while True:
currentTemp = temperature()
if level != 0:
if currentTemp - markTemp <= -2:
level -= 1
markTemp = currentTemp
elif currentTemp - markTemp >= 2:
if level < 4:
level += 1
markTemp = currentTemp
level = motor_run(level)
sleep(0.2)
# Esegue la funzione principale e gestisce KeyboardInterrupt
try:
main()
except KeyboardInterrupt:
motor.stop()
spi.close()
Spiegazione del codice
Importa le librerie per il controllo del motore e del pulsante, la comunicazione SPI con MCP3008 e i calcoli matematici. La libreria
gpiozeroè usata per controllare i dispositivi GPIO,spidevper la comunicazione SPI con MCP3008 emathper il calcolo della temperatura a partire dalla resistenza.#!/usr/bin/env python3 from gpiozero import Motor, Button from time import sleep import spidev import math
Inizializza la comunicazione SPI sul bus 0, dispositivo 0 (CE0), collegato al chip MCP3008 ADC.
# Initialize SPI for MCP3008 spi = spidev.SpiDev() spi.open(0, 0) # Bus 0, CE0 (GPIO8 / physical pin 24) spi.max_speed_hz = 1000000 # 1 MHz
Configura il GPIO22 come input per il pulsante e il motore con GPIO5 (avanti), GPIO6 (indietro) e GPIO13 (enable). Dichiara anche variabili globali per il livello di velocità e il monitoraggio della temperatura.
# Initialize GPIO pins for the button and motor control BtnPin = Button(22) # GPIO22 (physical pin 15) motor = Motor(forward=5, backward=6, enable=13) # GPIO5, GPIO6, GPIO13 # Initialize variables to track the motor speed level and temperatures level = 0 currentTemp = 0 markTemp = 0
Definisce una funzione per leggere valori analogici dall’MCP3008 su un canale specifico utilizzando SPI. Il valore restituito è un numero a 10 bit (0–1023).
def read_adc(channel): """ Reads analog value from MCP3008 channel (0–7). """ if channel < 0 or channel > 7: return -1 adc = spi.xfer2([1, (8 + channel) << 4, 0]) value = ((adc[1] & 0x03) << 8) | adc[2] return value
Definisce una funzione per leggere la temperatura dal termistore connesso a MCP3008 canale 0. Converte il valore ADC in tensione, calcola la resistenza e poi la converte in temperatura Celsius con l’approssimazione di Steinhart-Hart.
def temperature(): """ Reads and calculates the current temperature from the sensor. Returns: float: The current temperature in Celsius. """ analogVal = read_adc(0) # Assuming thermistor connected to CH0 Vr = 3.3 * analogVal / 1023.0 # For 3.3V system Rt = 10000.0 * Vr / (3.3 - Vr) temp = 1 / (((math.log(Rt / 10000.0)) / 3950.0) + (1 / (273.15 + 25.0))) Cel = temp - 273.15 return Cel
Una funzione per controllare la velocità del motore in base al
level(0–4). Il motore si ferma a livello 0, e per i livelli 1–4 la velocità PWM è impostata proporzionalmente.def motor_run(level): """ Adjusts the motor speed based on the specified level. Args: level (int): Desired motor speed level. Returns: int: Adjusted motor speed level. """ if level == 0: motor.stop() return 0 if level >= 4: level = 4 motor.forward(speed=float(level / 4)) return level
Definisce un gestore di evento per il pulsante che incrementa il livello di velocità del motore da 0 a 4 in ciclo. Aggiorna anche la temperatura di riferimento quando il livello cambia.
def changeLevel(): """ Changes the motor speed level when the button is pressed and updates the reference temperature. """ global level, currentTemp, markTemp print("Button pressed") level = (level + 1) % 5 markTemp = currentTemp # Bind the button press event to changeLevel function BtnPin.when_pressed = changeLevel
La logica principale legge continuamente la temperatura e la confronta con il valore di riferimento (
markTemp). Se la differenza è ±2°C, la velocità del motore viene regolata di conseguenza. Aggiorna il motore a ogni ciclo e introduce un breve ritardo per evitare commutazioni rapide.def main(): """ Main function to continuously monitor and respond to temperature changes. """ global level, currentTemp, markTemp markTemp = temperature() while True: currentTemp = temperature() if level != 0: if currentTemp - markTemp <= -2: level -= 1 markTemp = currentTemp elif currentTemp - markTemp >= 2: if level < 4: level += 1 markTemp = currentTemp level = motor_run(level) sleep(0.2)
Esegue la funzione principale in un blocco try-except e garantisce che il motore si fermi e la connessione SPI venga chiusa correttamente se interrotta con Ctrl+C.
# Run the main function and handle KeyboardInterrupt try: main() except KeyboardInterrupt: motor.stop() spi.close()