Nota
Ciao, benvenuto nella SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Community su Facebook! Approfondisci Raspberry Pi, Arduino ed ESP32 insieme ad altri appassionati.
Perché unirti a noi?
Supporto esperto: Risolvi i problemi post-vendita e le sfide tecniche grazie all’aiuto della nostra comunità e del nostro team.
Impara e condividi: Scambia suggerimenti e tutorial per migliorare le tue competenze.
Anteprime esclusive: Ottieni l’accesso anticipato agli annunci dei nuovi prodotti e anteprime esclusive.
Sconti speciali: Approfitta di sconti esclusivi sui nostri prodotti più recenti.
Promozioni festive e omaggi: Partecipa a omaggi e promozioni festive.
👉 Pronto a esplorare e creare con noi? Clicca su [Qui] e unisciti oggi!
3.1.3 Allarme Retromarcia
Introduzione
In questo progetto, utilizzeremo un display LCD, un buzzer e sensori a ultrasuoni per creare un sistema di assistenza alla retromarcia. Puoi installarlo su un veicolo telecomandato per simulare il processo di retromarcia in un garage.
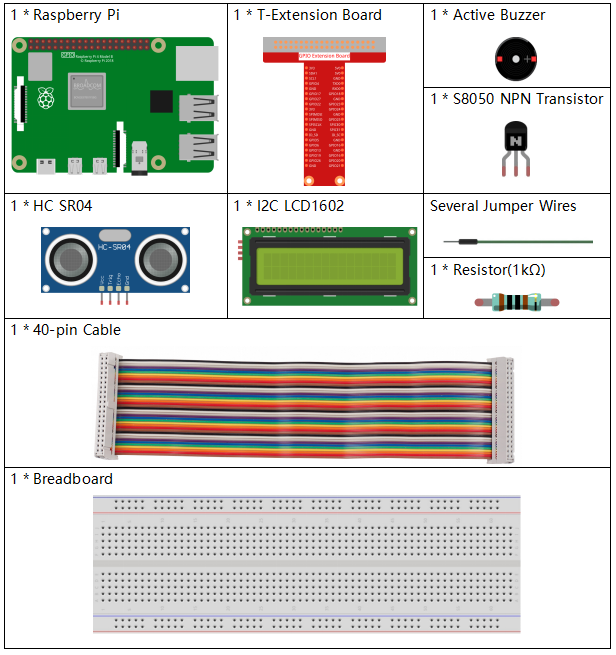
Componenti necessari
Per questo progetto, abbiamo bisogno dei seguenti componenti.
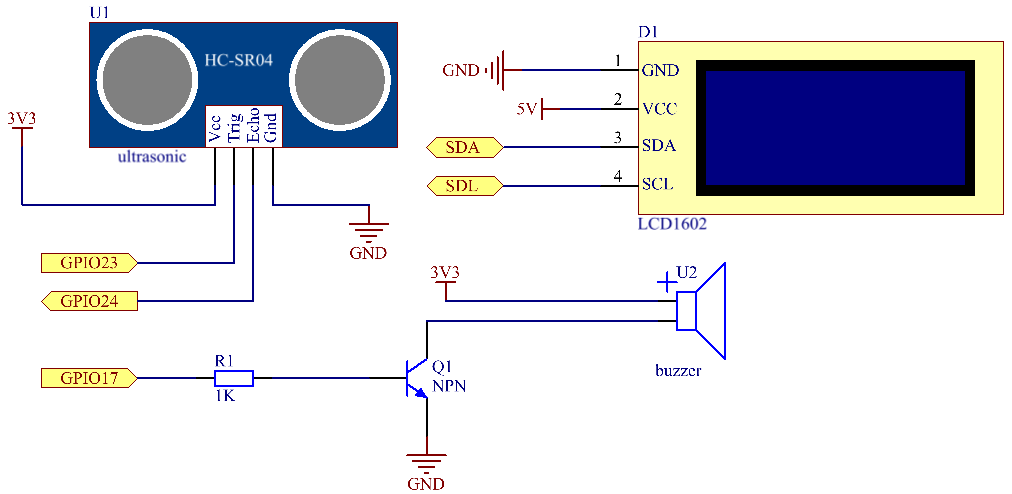
Schema elettrico
Il sensore a ultrasuoni rileva la distanza tra sé e l’ostacolo, visualizzando il risultato sul display LCD in forma numerica. Allo stesso tempo, il sensore ultrasuoni attiva il buzzer, emettendo suoni di allerta con frequenze differenti a seconda della distanza rilevata.
T-Board Name |
physical |
wiringPi |
BCM |
GPIO23 |
Pin 16 |
4 |
23 |
GPIO24 |
Pin 18 |
5 |
24 |
GPIO17 |
Pin 11 |
0 |
17 |
SDA1 |
Pin 3 |
||
SCL1 |
Pin 5 |
Procedura sperimentale
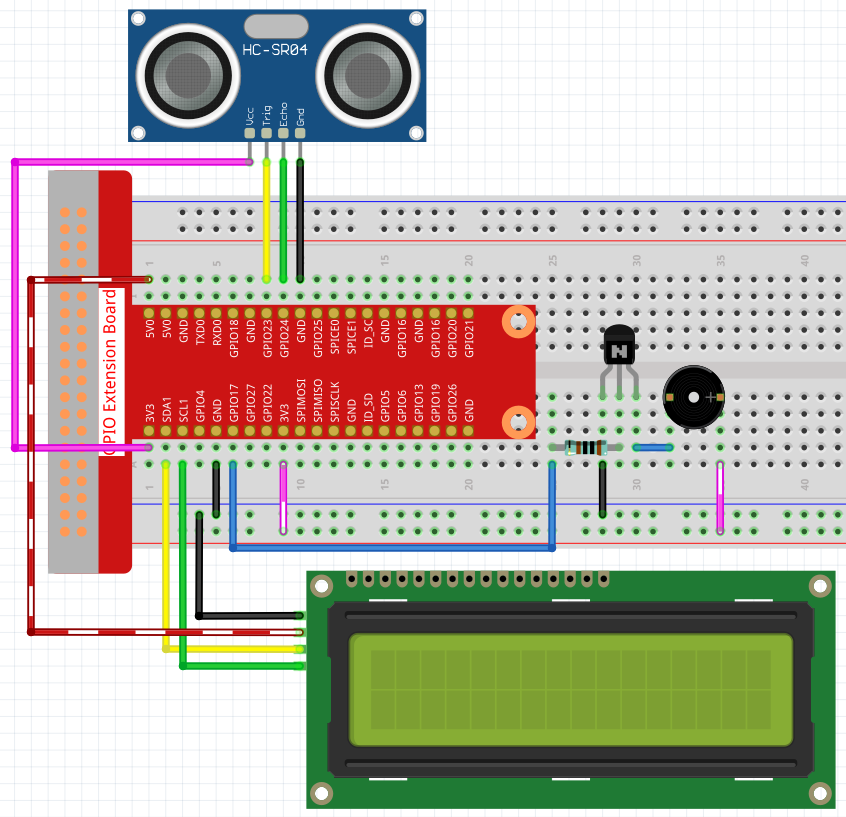
Passo 1: Costruisci il circuito.
Passo 2: Cambia la directory.
cd ~/davinci-kit-for-raspberry-pi/python-pi5
Passo 3: Esegui il programma.
sudo python3 3.1.3_ReversingAlarm.py
Durante l’esecuzione del codice, il modulo del sensore a ultrasuoni rileva la distanza dall’ostacolo e visualizza le informazioni relative alla distanza su LCD1602; inoltre, il buzzer emette un segnale di avviso la cui frequenza varia con la distanza.
Nota
Se ricevi l’errore
FileNotFoundError: [Errno 2] No such file or directory: '/dev/i2c-1', fai riferimento a Configurazione I²C per abilitare I2C.Se compare l’errore
ModuleNotFoundError: No module named 'smbus2', eseguisudo apt install python3-smbus2.Se ricevi l’errore
OSError: [Errno 121] Remote I/O error, significa che il modulo è cablato male o danneggiato.Se il codice e il cablaggio sono corretti, ma il display LCD non mostra contenuti, prova a regolare il contrasto girando il potenziometro sul retro.
Avvertimento
Se appare l’errore RuntimeError: Cannot determine SOC peripheral base address, fai riferimento a Se gpiozero non funziona.
Codice
Nota
Puoi Modificare/Reimpostare/Copiare/Eseguire/Arrestare il codice qui sotto. Prima di farlo, assicurati di essere nella directory del codice sorgente come davinci-kit-for-raspberry-pi/python-pi5. Dopo aver modificato il codice, potrai eseguirlo direttamente per vedere l’effetto.
#!/usr/bin/env python3
import LCD1602
import time
from gpiozero import DistanceSensor, Buzzer
# Inizializza il sensore a ultrasuoni con i pin GPIO
sensor = DistanceSensor(echo=24, trigger=23) # Pin Echo è GPIO 24, Pin Trigger è GPIO 23
# Inizializza il buzzer collegato al pin GPIO 17
buzzer = Buzzer(17)
def lcdsetup():
# Inizializza il display LCD con l'indirizzo I2C e attiva la retroilluminazione
LCD1602.init(0x27, 1) # 0x27 è l'indirizzo I2C dell'LCD
LCD1602.clear() # Cancella il display LCD
# Visualizza i messaggi di avvio sul display LCD
LCD1602.write(0, 0, 'Ultrasonic Starting')
LCD1602.write(1, 1, 'By SunFounder')
time.sleep(2) # Attesa di 2 secondi
def distance():
# Calcola e restituisce la distanza misurata dal sensore
dis = sensor.distance * 100 # Converte la distanza in centimetri
print('Distance: {:.2f} cm'.format(dis)) # Stampa la distanza con due cifre decimali
time.sleep(0.3) # Attesa di 0,3 secondi prima della prossima misurazione
return dis
def loop():
# Misura continuamente la distanza e aggiorna LCD e buzzer
while True:
dis = distance() # Ottiene la distanza corrente
# Visualizza la distanza e gestisce gli avvisi in base alla distanza
if dis > 400: # Verifica se la distanza è fuori portata
LCD1602.clear()
LCD1602.write(0, 0, 'Error')
LCD1602.write(3, 1, 'Out of range')
time.sleep(0.5)
else:
# Visualizza la distanza corrente sul display LCD
LCD1602.clear()
LCD1602.write(0, 0, 'Distance is')
LCD1602.write(5, 1, str(round(dis, 2)) + ' cm')
# Regola la frequenza del buzzer in base alla distanza
if dis >= 50:
time.sleep(0.5)
elif 20 < dis < 50:
# Distanza media: frequenza media del buzzer
for _ in range(2):
buzzer.on()
time.sleep(0.05)
buzzer.off()
time.sleep(0.2)
elif dis <= 20:
# Distanza ravvicinata: frequenza alta del buzzer
for _ in range(5):
buzzer.on()
time.sleep(0.05)
buzzer.off()
time.sleep(0.05)
try:
lcdsetup() # Configura il display LCD
loop() # Avvia il ciclo di misurazione
except KeyboardInterrupt:
# Spegne il buzzer e cancella l'LCD all'interruzione dell'utente (es. Ctrl+C)
buzzer.off()
LCD1602.clear()
Spiegazione del Codice
Questo script utilizza diverse librerie per le sue funzionalità. La libreria
LCD1602gestisce il display LCD, mentretimefornisce funzioni legate alla temporizzazione. La libreriagpiozeroè essenziale per le interazioni con i pin GPIO del Raspberry Pi, in particolare per operare il sensore di distanza e il buzzer.#!/usr/bin/env python3 import LCD1602 import time from gpiozero import DistanceSensor, Buzzer
Il sensore a ultrasuoni è configurato con i suoi pin echo e trigger collegati ai pin GPIO 24 e 23, rispettivamente. Inoltre, un buzzer è collegato al pin GPIO 17.
# Inizializza il sensore a ultrasuoni con i pin GPIO sensor = DistanceSensor(echo=24, trigger=23) # Pin Echo è GPIO 24, Pin Trigger è GPIO 23 # Inizializza il buzzer collegato al pin GPIO 17 buzzer = Buzzer(17)
L’inizializzazione del display LCD prevede la pulizia del display e la visualizzazione di un messaggio di avvio.
def lcdsetup(): # Inizializza il display LCD con l'indirizzo I2C e attiva la retroilluminazione LCD1602.init(0x27, 1) # 0x27 è l'indirizzo I2C dell'LCD LCD1602.clear() # Cancella il display LCD # Visualizza i messaggi di avvio sul display LCD LCD1602.write(0, 0, 'Ultrasonic Starting') LCD1602.write(1, 1, 'By SunFounder') time.sleep(2) # Attesa di 2 secondi
La funzione
distancecalcola la distanza misurata dal sensore a ultrasuoni, la visualizza e restituisce il valore in centimetri.def distance(): # Calcola e restituisce la distanza misurata dal sensore dis = sensor.distance * 100 # Converte la distanza in centimetri print('Distance: {:.2f} cm'.format(dis)) # Stampa la distanza con due cifre decimali time.sleep(0.3) # Attesa di 0,3 secondi prima della prossima misurazione return dis
Il ciclo principale misura continuamente la distanza, aggiornando sia l’LCD che il buzzer. Gestisce diversi intervalli di distanza con azioni specifiche, come la visualizzazione di messaggi di errore o la variazione della frequenza del buzzer in base alla distanza misurata.
def loop(): # Misura continuamente la distanza e aggiorna LCD e buzzer while True: dis = distance() # Ottiene la distanza corrente # Visualizza la distanza e gestisce gli avvisi in base alla distanza if dis > 400: # Verifica se la distanza è fuori portata LCD1602.clear() LCD1602.write(0, 0, 'Error') LCD1602.write(3, 1, 'Out of range') time.sleep(0.5) else: # Visualizza la distanza corrente sul display LCD LCD1602.clear() LCD1602.write(0, 0, 'Distance is') LCD1602.write(5, 1, str(round(dis, 2)) + ' cm') # Regola la frequenza del buzzer in base alla distanza if dis >= 50: time.sleep(0.5) elif 20 < dis < 50: # Distanza media: frequenza media del buzzer for _ in range(2): buzzer.on() time.sleep(0.05) buzzer.off() time.sleep(0.2) elif dis <= 20: # Distanza ravvicinata: frequenza alta del buzzer for _ in range(5): buzzer.on() time.sleep(0.05) buzzer.off() time.sleep(0.05)
Al momento dell’esecuzione, lo script configura l’LCD e avvia il ciclo principale. Può essere interrotto con un comando da tastiera (Ctrl+C), che spegne il buzzer e cancella l’LCD.
try: lcdsetup() # Configura il display LCD loop() # Avvia il ciclo di misurazione except KeyboardInterrupt: # Spegne il buzzer e cancella l'LCD all'interruzione dell'utente (es. Ctrl+C) buzzer.off() LCD1602.clear()