Note
Bonjour et bienvenue dans la communauté des passionnés de Raspberry Pi, Arduino et ESP32 sur Facebook, animée par SunFounder ! Explorez plus en profondeur l’univers du Raspberry Pi, Arduino et ESP32 avec d’autres passionnés.
Pourquoi nous rejoindre ?
Support d’experts : Résolvez vos problèmes après-vente et défis techniques grâce à l’aide de notre communauté et de notre équipe.
Apprendre et partager : Échangez des astuces et des tutoriels pour développer vos compétences.
Aperçus exclusifs : Bénéficiez d’un accès anticipé aux annonces de nouveaux produits et aperçus exclusifs.
Réductions spéciales : Profitez de réductions exclusives sur nos produits les plus récents.
Promotions festives et concours : Participez à des concours et promotions pendant les fêtes.
👉 Prêt à explorer et créer avec nous ? Cliquez sur [Ici] et rejoignez-nous dès aujourd’hui !
Moteur pas à pas

Les moteurs pas à pas, grâce à leur conception unique, peuvent être contrôlés avec une grande précision sans nécessiter de mécanismes de rétroaction. L’arbre du moteur, équipé d’une série d’aimants, est contrôlé par une série de bobines électromagnétiques qui sont alimentées positivement et négativement dans une séquence précise, déplaçant l’arbre en avant ou en arrière par petits « pas ».
Principe
Il existe deux types de moteurs pas à pas : unipolaires et bipolaires. Il est très important de savoir avec quel type de moteur vous travaillez. Dans cette expérience, nous utiliserons un moteur pas à pas unipolaire.
Le moteur pas à pas utilisé ici est un modèle à quatre phases, qui fonctionne avec une alimentation en courant continu unipolaire. En alimentant toutes les enroulements de phase du moteur avec une séquence de timing appropriée, vous pouvez le faire tourner pas à pas. Voici le schéma d’un moteur pas à pas réactif à quatre phases :
Voici comment fonctionne un moteur pas à pas à 4 phases :
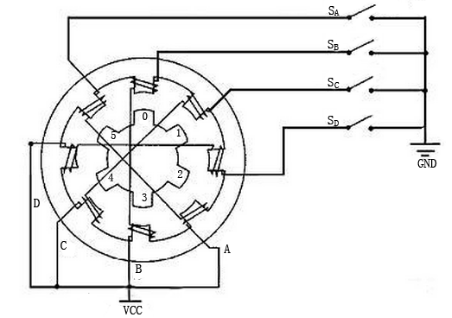
Dans la figure, au centre du moteur se trouve un rotor – un aimant permanent en forme d’engrenage. Autour du rotor, les dents numérotées de 0 à 5 sont visibles. Plus loin, on trouve huit pôles magnétiques, chaque paire de pôles opposés étant reliée par une bobine. Ces pôles forment ainsi quatre paires, de A à D, appelées phases. Le moteur dispose de quatre fils de connexion à raccorder aux interrupteurs SA, SB, SC et SD. Par conséquent, les quatre phases sont connectées en parallèle dans le circuit, et les deux pôles magnétiques d’une phase sont en série.
Au départ, l’interrupteur SB est alimenté, tandis que SA, SC et SD ne le sont pas, et les pôles magnétiques de la phase B s’alignent avec les dents 0 et 3 du rotor. Simultanément, les dents 1 et 4 génèrent des dents décalées avec les pôles des phases C et D. Les dents 2 et 5 génèrent des dents décalées avec les pôles des phases D et A. Lorsque l’interrupteur SC est alimenté, tandis que SB, SA et SD sont éteints, le rotor tourne sous l’effet du champ magnétique de la bobine de la phase C, entre les dents 1 et 4. Ensuite, les dents 1 et 4 s’alignent avec les pôles magnétiques de la phase C. Pendant ce temps, les dents 0 et 3 génèrent des dents décalées avec les pôles des phases A et B, et les dents 2 et 5 génèrent des dents décalées avec les pôles des phases A et D. Ce processus se répète indéfiniment. En alimentant successivement les phases A, B, C et D, le rotor tournera dans cet ordre.
Le moteur pas à pas à quatre phases dispose de trois modes de fonctionnement : à quatre pas simples, à quatre pas doubles et à huit pas. L’angle de pas dans les modes à quatre pas simples et doubles est identique, mais le couple de commande est plus faible dans le mode à quatre pas simple. L’angle de pas du mode à huit pas est la moitié de celui des modes à quatre pas simples et doubles. Ainsi, le mode à huit pas permet de maintenir un couple élevé et d’améliorer la précision du contrôle. Dans cette expérience, nous utiliserons le mode à huit pas pour faire fonctionner le moteur pas à pas.
Module ULN2003
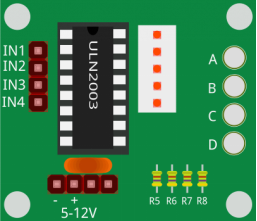
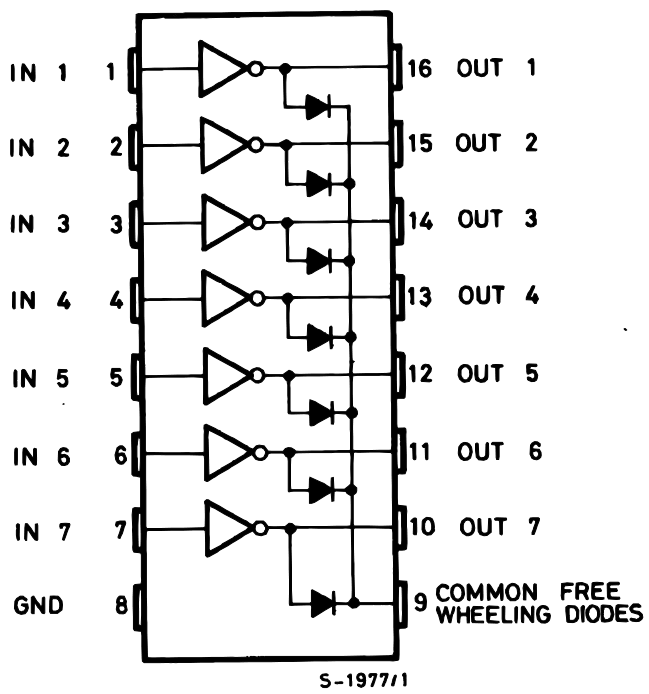
Pour utiliser le moteur dans le circuit, une carte driver est nécessaire. Le driver de moteur pas à pas ULN2003 est un circuit inverseur à 7 canaux. Cela signifie que lorsque l’entrée est au niveau haut, la sortie du ULN2003 est au niveau bas, et vice versa. Si nous appliquons un niveau haut à IN1 et un niveau bas à IN2, IN3 et IN4, alors la sortie OUT1 sera au niveau bas, et toutes les autres sorties seront au niveau haut. Ainsi, D1 s’allume, l’interrupteur SA est alimenté, et le moteur pas à pas effectue un pas. Ce processus se répète continuellement. Il suffit de fournir au moteur pas à pas une séquence de timing spécifique pour qu’il effectue un mouvement pas à pas. Le module ULN2003 est utilisé ici pour fournir des séquences de timing spécifiques au moteur pas à pas.
Exemple
2.14 Moteur Pas à Pas (Arduino Project)
3.5 Système de contrôle d’accès (Arduino Project)