Nota
Hola, bienvenido a la comunidad de entusiastas de SunFounder Raspberry Pi, Arduino y ESP32 en Facebook. Profundiza en Raspberry Pi, Arduino y ESP32 junto a otros entusiastas.
¿Por qué unirse?
Soporte experto: Resuelve problemas posventa y desafíos técnicos con ayuda de nuestra comunidad y equipo.
Aprende y comparte: Intercambia consejos y tutoriales para mejorar tus habilidades.
Avances exclusivos: Accede anticipadamente a anuncios de nuevos productos y adelantos.
Descuentos especiales: Disfruta de descuentos exclusivos en nuestros productos más recientes.
Promociones y sorteos festivos: Participa en sorteos y promociones especiales por festividades.
👉 ¿Listo para explorar y crear con nosotros? Haz clic en [Aquí] y únete hoy mismo.
Módulo Ultrasónico
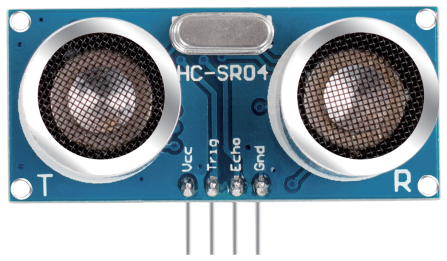
El módulo de rango ultrasónico proporciona una medición sin contacto de 2 cm a 400 cm, con una precisión de hasta 3 mm. Puede garantizar una señal estable dentro de los 5 m, y la señal se debilita gradualmente después de los 5 m, hasta desaparecer alrededor de los 7 m.
El módulo incluye transmisores ultrasónicos, receptor y circuito de control. Los principios básicos son los siguientes:
Utiliza un flip-flop IO para procesar una señal de nivel alto de al menos 10 us.
El módulo envía automáticamente ocho pulsos ultrasónicos de 40 kHz y detecta si hay un retorno de señal de pulso.
Si la señal regresa, el nivel alto del IO de salida representa la duración desde la transmisión de la onda ultrasónica hasta su retorno. Aquí, la distancia se calcula como: distancia de prueba = (tiempo alto x velocidad del sonido (340 m/s) / 2).
El diagrama de tiempos se muestra a continuación.
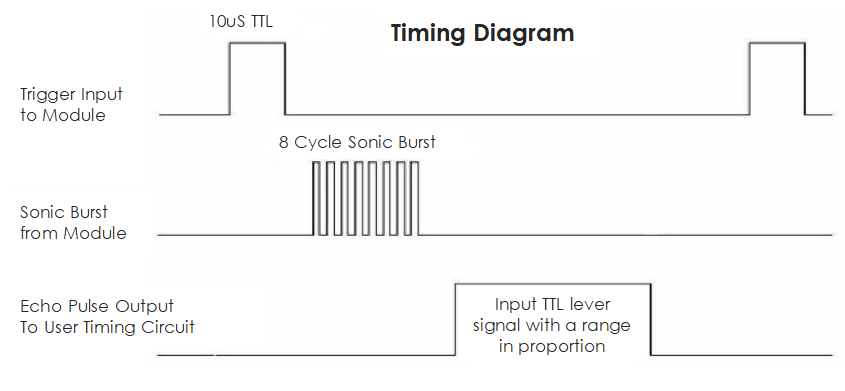
Solo necesitas suministrar un pulso corto de 10 us a la entrada del disparador para iniciar la medición. El módulo enviará una ráfaga de ultrasonido de 8 ciclos a 40 kHz y generará su eco. Puedes calcular el rango mediante el intervalo de tiempo entre el envío de la señal de disparo y la recepción de la señal de eco.
Fórmula: us / 58 = centímetros o us / 148 = pulgadas; también: rango = tiempo de nivel alto * velocidad (340 m/s) / 2. Se sugiere usar un ciclo de medición mayor a 60 ms para evitar colisiones entre la señal de disparo y la señal de eco.
Ejemplo
2.33 Módulo Ultrasónico (Proyecto Arduino)
3.1 Asistente de Reversa (Proyecto Arduino)
2.17 JUEGO - Loro Saltarín (Proyecto Scratch)