Nota
¡Hola, bienvenido a la Comunidad de Entusiastas de Raspberry Pi, Arduino y ESP32 en Facebook! Profundiza más en Raspberry Pi, Arduino y ESP32 junto con otros entusiastas.
¿Por qué unirte?
Soporte experto: Resuelve problemas postventa y desafíos técnicos con la ayuda de nuestra comunidad y equipo.
Aprende y comparte: Intercambia consejos y tutoriales para mejorar tus habilidades.
Previsualizaciones exclusivas: Accede anticipadamente a anuncios de nuevos productos y vistas previas.
Descuentos especiales: Disfruta de descuentos exclusivos en nuestros productos más recientes.
Promociones festivas y sorteos: Participa en sorteos y promociones especiales durante las festividades.
👉 ¿Listo para explorar y crear con nosotros? Haz clic en [aquí] y únete hoy.
Motor Servo (SG90)

Los motores servo son dispositivos que pueden girar hasta un ángulo o posición específica. Pueden usarse para mover brazos robóticos, volantes, estabilizadores de cámara, etc. Los motores servo tienen tres cables: alimentación, tierra y señal. El cable de alimentación generalmente es rojo y debe conectarse al pin de 5V en la placa de Arduino. El cable de tierra es generalmente negro o marrón y debe conectarse a un pin de tierra en la placa. El cable de señal es generalmente amarillo o naranja y debe conectarse a un pin PWM en la placa.
Distribución de pines
Cable marrón: GND
Cable naranja: Pin de señal, conéctalo al pin PWM de la placa principal.
Cable rojo: VCC
Principio
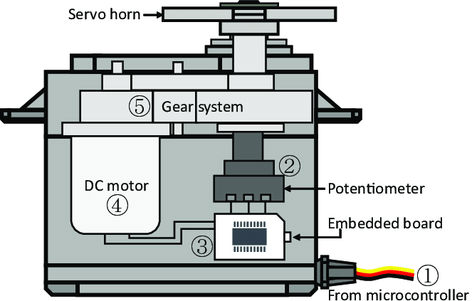
Un servo está compuesto generalmente por las siguientes partes: carcasa, eje, sistema de engranajes, potenciómetro, motor de corriente continua y placa embebida.
Funciona de la siguiente manera:
El microcontrolador envía señales PWM al servo, luego la placa embebida dentro del servo recibe las señales a través del pin de señal y controla el motor interno para que gire.
Como resultado, el motor impulsa el sistema de engranajes y luego mueve el eje después de la desaceleración.
El eje y el potenciómetro del servo están conectados entre sí.
Cuando el eje gira, mueve el potenciómetro, lo que hace que el potenciómetro emita una señal de voltaje hacia la placa embebida.
Luego, la placa determina la dirección y velocidad de rotación en base a la posición actual, para que pueda detenerse exactamente en la posición correcta definida y mantenerse allí.
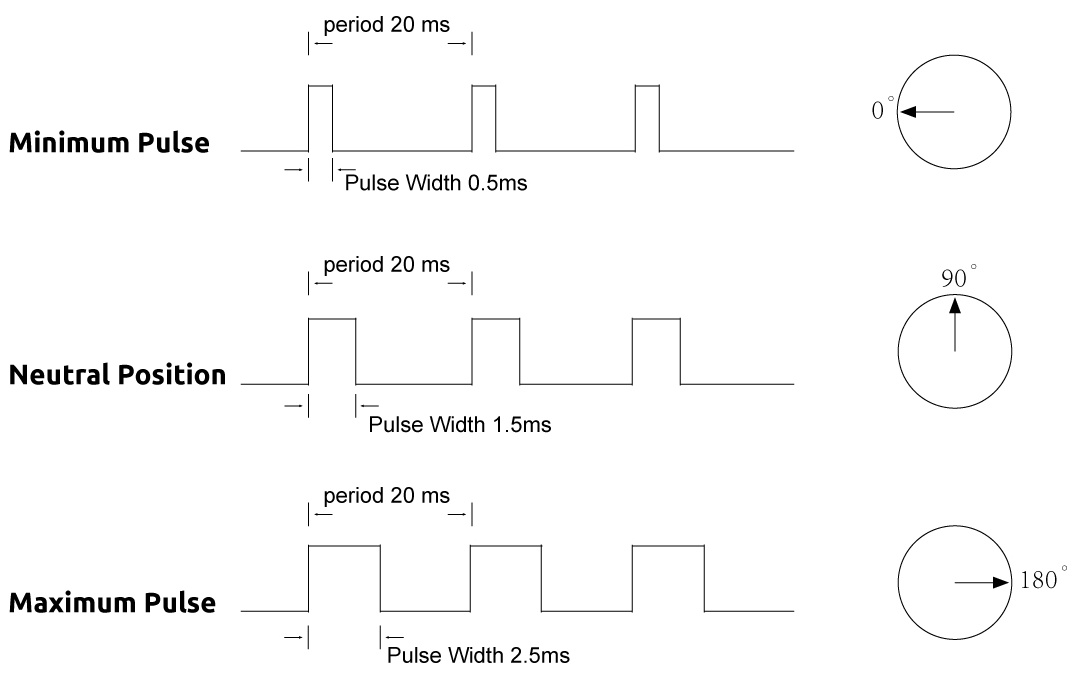
Pulso de trabajo
El ángulo es determinado por la duración de un pulso que se aplica al cable de control. Esto se llama modulación por ancho de pulso (PWM).
El servo espera ver un pulso cada 20 ms. La longitud del pulso determinará cuántos grados gira el servo.
Por ejemplo, un pulso de 1.5 ms hará que el servo gire hasta la posición de 90 grados (posición neutral).
Cuando se envía un pulso al servo que es menor a 1.5 ms, el servo gira hasta una posición y mantiene su eje de salida algunos grados en sentido antihorario desde el punto neutral.
Cuando el pulso es más largo que 1.5 ms, ocurre lo opuesto.
El ancho mínimo y máximo del pulso que hará que el servo gire hasta una posición válida depende de cada servo.
Generalmente, el pulso tendrá un ancho de aproximadamente 0.5 ms ~ 2.5 ms.
Ejemplo
Lección 33: Motor Servo (SG90) (Arduino UNO)
Lección 33: Motor Servo (SG90) (ESP32)
Lección 33: Motor Servo (SG90) (Raspberry Pi Pico)
Lección 33: Motor Servo (SG90) (Raspberry Pi)
Lección 37: Basurero Inteligente (Arduino UNO)