Note
Hello, welcome to the SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Community on Facebook! Dive deeper into Raspberry Pi, Arduino, and ESP32 with fellow enthusiasts.
Why Join?
Expert Support: Solve post-sale issues and technical challenges with help from our community and team.
Learn & Share: Exchange tips and tutorials to enhance your skills.
Exclusive Previews: Get early access to new product announcements and sneak peeks.
Special Discounts: Enjoy exclusive discounts on our newest products.
Festive Promotions and Giveaways: Take part in giveaways and holiday promotions.
👉 Ready to explore and create with us? Click [here] and join today!
4.1.7 Smart Fan(MCP3008)
Note

Depending on your kit version, please identify whether you have ADC0834 or MCP3008 and proceed with the matching section.
Introduction
In this project, we will use motors, buttons and thermistors to make a manual + automatic smart fan whose wind speed is adjustable.
Required Components
In this project, we need the following components.
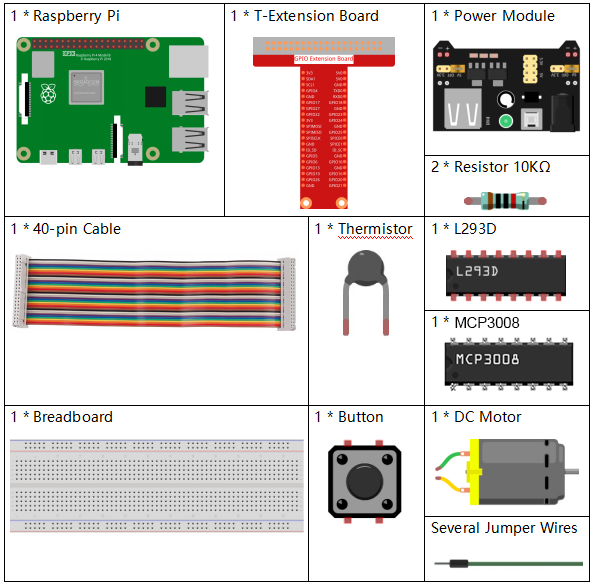
It’s definitely convenient to buy a whole kit, here’s the link:
Name |
ITEMS IN THIS KIT |
LINK |
|---|---|---|
Raphael Kit |
337 |
You can also buy them separately from the links below.
COMPONENT INTRODUCTION |
PURCHASE LINK |
|---|---|
- |
|
- |
|
- |
|
Schematic Diagram
T-Board Name |
physical |
wiringPi |
BCM |
SPICE0 |
Pin 24 |
10 |
8 |
SPIMOSI |
Pin 19 |
12 |
10 |
SPIMISO |
Pin 21 |
13 |
9 |
SPISCLK |
Pin 23 |
14 |
11 |
GPIO22 |
Pin 15 |
3 |
22 |
GPIO5 |
Pin 29 |
21 |
5 |
GPIO6 |
Pin 31 |
22 |
6 |
GPIO13 |
Pin 33 |
23 |
13 |

Experimental Procedures
Step 1: Build the circuit.
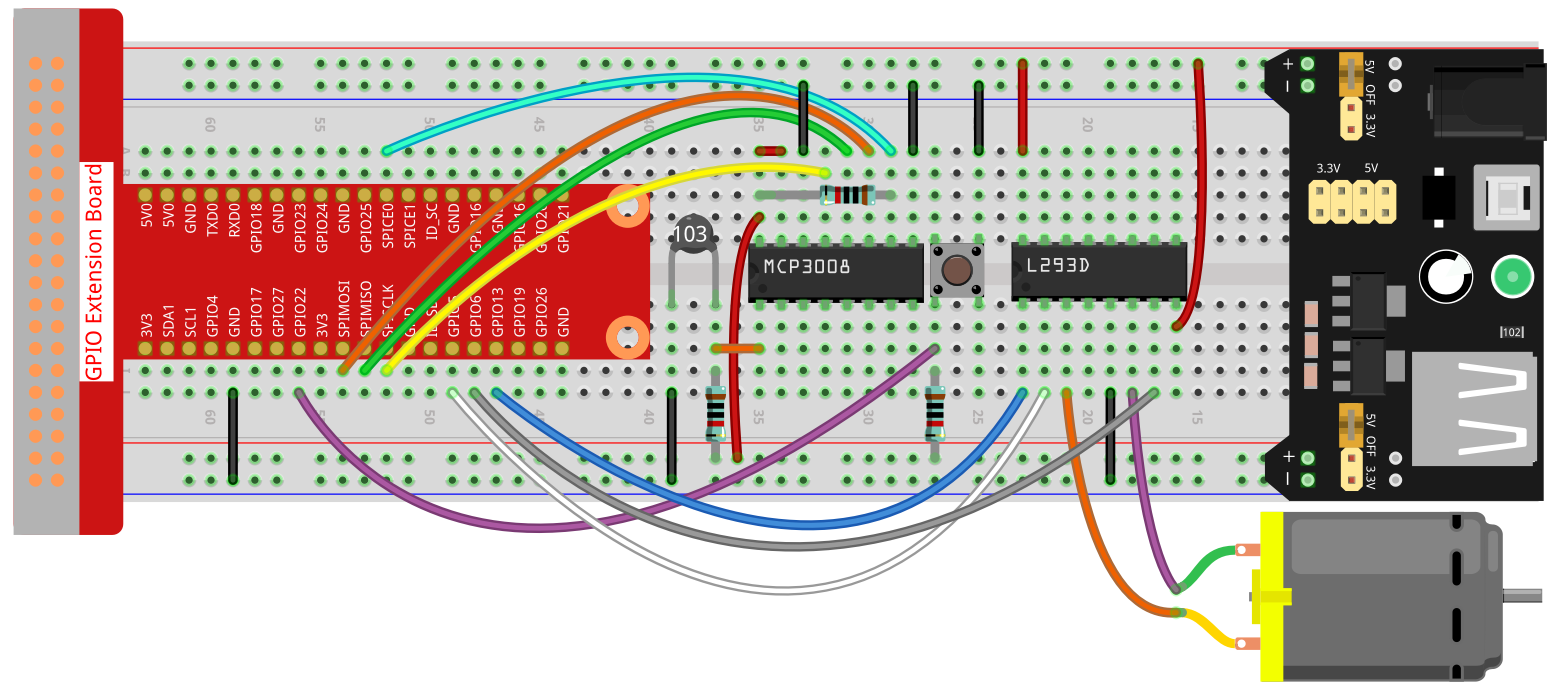
Note
The power module can apply a 9V battery with the 9V Battery Buckle in the kit.

Step 2: Set up the SPI interface and install the spidev library (see SPI Configuration for detailed instructions). If you have already completed these steps, you can skip this.
Step 3: Get into the folder of the code.
cd ~/raphael-kit/python-pi5
Step 4: Run.
sudo python3 4.1.10-2_SmartFan_zero.py
As the code runs, start the fan by pressing the button. Every time you press, 1 speed grade is adjusted up or down. There are 5 kinds of speed grades: 0~4. When set to the 4th speed grade and you press the button, the fan stops working with a 0 wind speed.
Once the temperature goes up or down for more than 2℃, the speed automatically gets 1-grade faster or slower.
Code
Note
You can Modify/Reset/Copy/Run/Stop the code below. But before that, you need to go to source code path like raphael-kit/python-pi5. After modifying the code, you can run it directly to see the effect.
#!/usr/bin/env python3
from gpiozero import Motor, Button
from time import sleep
import spidev
import math
# Initialize SPI for MCP3008
spi = spidev.SpiDev()
spi.open(0, 0) # Bus 0, CE0 (GPIO8 / physical pin 24)
spi.max_speed_hz = 1000000 # 1 MHz
# Initialize GPIO pins for the button and motor control
BtnPin = Button(22) # GPIO22 (physical pin 15)
motor = Motor(forward=5, backward=6, enable=13) # GPIO5, GPIO6, GPIO13
# Initialize variables to track the motor speed level and temperatures
level = 0
currentTemp = 0
markTemp = 0
def read_adc(channel):
"""
Reads analog value from MCP3008 channel (0–7).
"""
if channel < 0 or channel > 7:
return -1
adc = spi.xfer2([1, (8 + channel) << 4, 0])
value = ((adc[1] & 0x03) << 8) | adc[2]
return value
def temperature():
"""
Reads and calculates the current temperature from the sensor.
Returns:
float: The current temperature in Celsius.
"""
analogVal = read_adc(0) # Assuming thermistor connected to CH0
Vr = 3.3 * analogVal / 1023.0 # For 3.3V system
Rt = 10000.0 * Vr / (3.3 - Vr)
temp = 1 / (((math.log(Rt / 10000.0)) / 3950.0) + (1 / (273.15 + 25.0)))
Cel = temp - 273.15
return Cel
def motor_run(level):
"""
Adjusts the motor speed based on the specified level.
Args:
level (int): Desired motor speed level.
Returns:
int: Adjusted motor speed level.
"""
if level == 0:
motor.stop()
return 0
if level >= 4:
level = 4
motor.forward(speed=float(level / 4))
return level
def changeLevel():
"""
Changes the motor speed level when the button is pressed and updates the reference temperature.
"""
global level, currentTemp, markTemp
print("Button pressed")
level = (level + 1) % 5
markTemp = currentTemp
# Bind the button press event to changeLevel function
BtnPin.when_pressed = changeLevel
def main():
"""
Main function to continuously monitor and respond to temperature changes.
"""
global level, currentTemp, markTemp
markTemp = temperature()
while True:
currentTemp = temperature()
if level != 0:
if currentTemp - markTemp <= -2:
level -= 1
markTemp = currentTemp
elif currentTemp - markTemp >= 2:
if level < 4:
level += 1
markTemp = currentTemp
level = motor_run(level)
sleep(0.2)
# Run the main function and handle KeyboardInterrupt
try:
main()
except KeyboardInterrupt:
motor.stop()
spi.close()
Code Explanation
Imports libraries for motor and button control, SPI communication with MCP3008, and mathematical computations. The
gpiozerlibrary is used for controlling GPIO devices,spidevfor SPI communication with the MCP3008 ADC, andmathfor computing the temperature from resistance.#!/usr/bin/env python3 from gpiozero import Motor, Button from time import sleep import spidev import math
Initializes SPI communication on bus 0, device 0 (CE0), which connects to the MCP3008 ADC chip.
# Initialize SPI for MCP3008 spi = spidev.SpiDev() spi.open(0, 0) # Bus 0, CE0 (GPIO8 / physical pin 24) spi.max_speed_hz = 1000000 # 1 MHz
Sets up GPIO pin 22 as a button input, and configures the motor with GPIO pins 5 (forward), 6 (backward), and 13 (enable). Also declares global variables for motor speed level and temperature tracking.
# Initialize GPIO pins for the button and motor control BtnPin = Button(22) # GPIO22 (physical pin 15) motor = Motor(forward=5, backward=6, enable=13) # GPIO5, GPIO6, GPIO13 # Initialize variables to track the motor speed level and temperatures level = 0 currentTemp = 0 markTemp = 0
Defines a function to read analog values from the MCP3008 on a specified channel using SPI. The value returned is a 10-bit number (0–1023).
def read_adc(channel): """ Reads analog value from MCP3008 channel (0–7). """ if channel < 0 or channel > 7: return -1 adc = spi.xfer2([1, (8 + channel) << 4, 0]) value = ((adc[1] & 0x03) << 8) | adc[2] return value
Defines a function to read the temperature from the thermistor connected to MCP3008 channel 0. It converts the ADC value into voltage, calculates resistance, and then converts that into temperature in Celsius using the Steinhart-Hart approximation.
def temperature(): """ Reads and calculates the current temperature from the sensor. Returns: float: The current temperature in Celsius. """ analogVal = read_adc(0) # Assuming thermistor connected to CH0 Vr = 3.3 * analogVal / 1023.0 # For 3.3V system Rt = 10000.0 * Vr / (3.3 - Vr) temp = 1 / (((math.log(Rt / 10000.0)) / 3950.0) + (1 / (273.15 + 25.0))) Cel = temp - 273.15 return Cel
A function to control motor speed based on the
level(0–4). The motor stops at level 0, and for levels 1–4, the PWM speed is set proportionally (e.g., level 2 means 50% speed).def motor_run(level): """ Adjusts the motor speed based on the specified level. Args: level (int): Desired motor speed level. Returns: int: Adjusted motor speed level. """ if level == 0: motor.stop() return 0 if level >= 4: level = 4 motor.forward(speed=float(level / 4)) return level
Defines a button event handler that increments the motor speed level from 0 to 4 in a cycle. It also updates the reference temperature when the level changes.
def changeLevel(): """ Changes the motor speed level when the button is pressed and updates the reference temperature. """ global level, currentTemp, markTemp print("Button pressed") level = (level + 1) % 5 markTemp = currentTemp # Bind the button press event to changeLevel function BtnPin.when_pressed = changeLevel
The main logic continuously reads temperature and compares it with a reference value (
markTemp). If the temperature difference is ±2°C, the motor speed level is adjusted accordingly. The motor is updated in each cycle, and a short delay avoids rapid switching.def main(): """ Main function to continuously monitor and respond to temperature changes. """ global level, currentTemp, markTemp markTemp = temperature() while True: currentTemp = temperature() if level != 0: if currentTemp - markTemp <= -2: level -= 1 markTemp = currentTemp elif currentTemp - markTemp >= 2: if level < 4: level += 1 markTemp = currentTemp level = motor_run(level) sleep(0.2)
Runs the main function inside a try-except block and ensures that the motor is stopped and SPI connection is closed gracefully if interrupted via Ctrl+C.
# Run the main function and handle KeyboardInterrupt try: main() except KeyboardInterrupt: motor.stop() spi.close()