Note
Hello, welcome to the SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Community on Facebook! Dive deeper into Raspberry Pi, Arduino, and ESP32 with fellow enthusiasts.
Why Join?
Expert Support: Solve post-sale issues and technical challenges with help from our community and team.
Learn & Share: Exchange tips and tutorials to enhance your skills.
Exclusive Previews: Get early access to new product announcements and sneak peeks.
Special Discounts: Enjoy exclusive discounts on our newest products.
Festive Promotions and Giveaways: Take part in giveaways and holiday promotions.
👉 Ready to explore and create with us? Click [here] and join today!
4.1.5 Welcome
Introduction
In this project, we will use PIR to sense the movement of pedestrians, and use servos, LED, buzzer to simulate the work of the sensor door of the convenience store. When the pedestrian appears within the sensing range of the PIR, the indicator light will be on, the door will be opened, and the buzzer will play the opening bell.
Required Components
In this project, we need the following components.
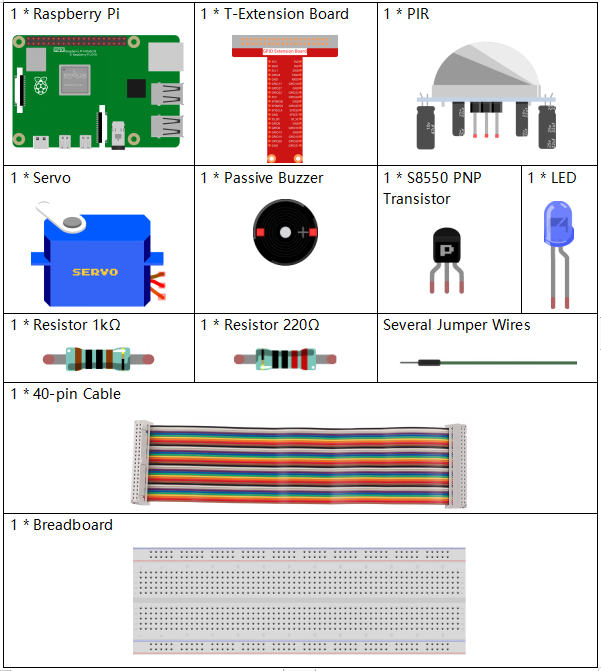
It’s definitely convenient to buy a whole kit, here’s the link:
Name |
ITEMS IN THIS KIT |
LINK |
|---|---|---|
Raphael Kit |
337 |
You can also buy them separately from the links below.
COMPONENT INTRODUCTION |
PURCHASE LINK |
|---|---|
- |
|
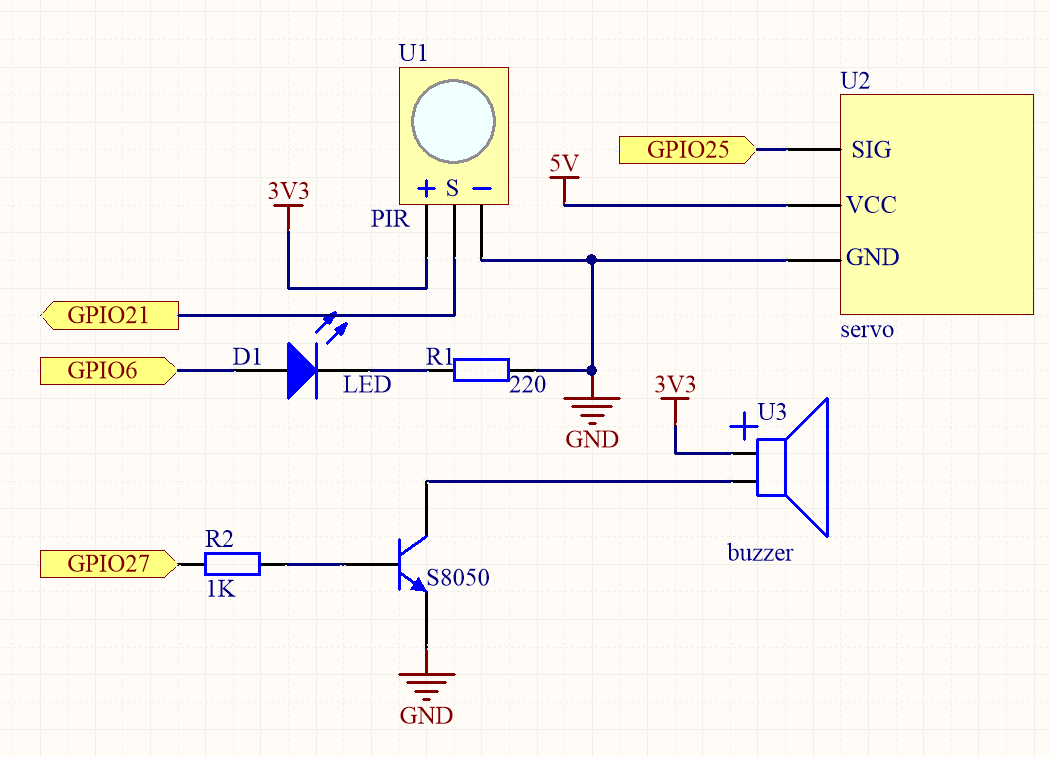
Schematic Diagram
T-Board Name |
physical |
wiringPi |
BCM |
GPIO18 |
Pin 12 |
1 |
18 |
GPIO17 |
Pin 11 |
0 |
17 |
GPIO27 |
Pin 13 |
2 |
27 |
GPIO22 |
Pin 15 |
3 |
22 |
Experimental Procedures
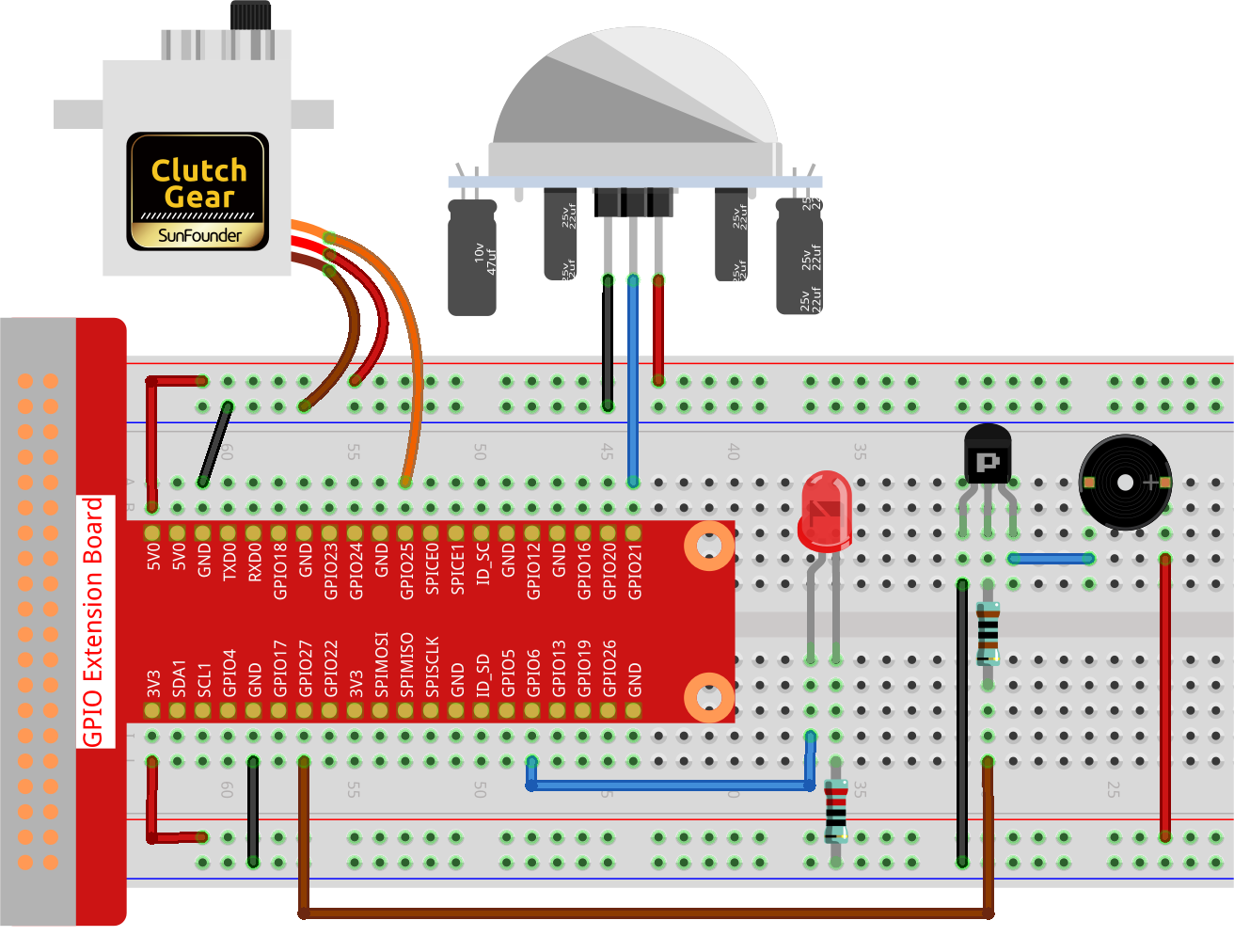
Step 1: Build the circuit.
Step 2: Change directory.
cd ~/raphael-kit/python-pi5
Step 3: Run.
sudo python3 4.1.8_Welcome_zero.py
After the code runs, if the PIR sensor detects someone passing by, the door will automatically open (simulated by the servo), turn on the indicator and play the doorbell music. After the doorbell music plays, the system will automatically close the door and turn off the indicator light, waiting for the next time someone passes by.
There are two potentiometers on the PIR module: one is to adjust sensitivity and the other is to adjust the detection distance. To make the PIR module work better, you You need to turn both of them counterclockwise to the end.

Warning
If there is an error prompt RuntimeError: Cannot determine SOC peripheral base address, please refer to If gpiozero doesn’t work.
Code
Note
You can Modify/Reset/Copy/Run/Stop the code below. But before that, you need to go to source code path like raphael-kit/python-pi5. After modifying the code, you can run it directly to see the effect.
#!/usr/bin/env python3
from gpiozero import LED, MotionSensor, Servo, TonalBuzzer
import time
# GPIO pin setup for LED, motion sensor (PIR), and buzzer
ledPin = LED(6)
pirPin = MotionSensor(21)
buzPin = TonalBuzzer(27)
# Servo motor pulse width correction factor and calculation
myCorrection = 0.45
maxPW = (2.0 + myCorrection) / 1000 # Maximum pulse width
minPW = (1.0 - myCorrection) / 1000 # Minimum pulse width
# Initialize servo with custom pulse widths
servoPin = Servo(25, min_pulse_width=minPW, max_pulse_width=maxPW)
# Musical tune for buzzer, with notes and durations
tune = [('C#4', 0.2), ('D4', 0.2), (None, 0.2),
('Eb4', 0.2), ('E4', 0.2), (None, 0.6),
('F#4', 0.2), ('G4', 0.2), (None, 0.6),
('Eb4', 0.2), ('E4', 0.2), (None, 0.2),
('F#4', 0.2), ('G4', 0.2), (None, 0.2),
('C4', 0.2), ('B4', 0.2), (None, 0.2),
('F#4', 0.2), ('G4', 0.2), (None, 0.2),
('B4', 0.2), ('Bb4', 0.5), (None, 0.6),
('A4', 0.2), ('G4', 0.2), ('E4', 0.2),
('D4', 0.2), ('E4', 0.2)]
def setAngle(angle):
"""
Move the servo to a specified angle.
:param angle: Angle in degrees (0-180).
"""
value = float(angle / 180) # Convert angle to servo value
servoPin.value = value # Set servo position
time.sleep(0.001) # Short delay for servo movement
def doorbell():
"""
Play a musical tune using the buzzer.
"""
for note, duration in tune:
buzPin.play(note) # Play the note
time.sleep(float(duration)) # Duration of the note
buzPin.stop() # Stop buzzer after playing the tune
def closedoor():
# Turn off LED and move servo to close door
ledPin.off()
for i in range(180, -1, -1):
setAngle(i) # Move servo from 180 to 0 degrees
time.sleep(0.001) # Short delay for smooth movement
time.sleep(1) # Wait after closing door
def opendoor():
# Turn on LED, open door (move servo), play tune, close door
ledPin.on()
for i in range(0, 181):
setAngle(i) # Move servo from 0 to 180 degrees
time.sleep(0.001) # Short delay for smooth movement
time.sleep(1) # Wait before playing the tune
doorbell() # Play the doorbell tune
closedoor() # Close the door after the tune
def loop():
# Main loop to check for motion and operate door
while True:
if pirPin.motion_detected:
opendoor() # Open door if motion detected
time.sleep(0.1) # Short delay in loop
try:
loop()
except KeyboardInterrupt:
# Clean up GPIO on user interrupt (e.g., Ctrl+C)
buzPin.stop()
ledPin.off()
Code Explanation
The script begins by importing necessary modules. The
gpiozerolibrary is used to interface with the LED, motion sensor, servo motor, and tonal buzzer. Thetimemodule is for handling timing-related functions.#!/usr/bin/env python3 from gpiozero import LED, MotionSensor, Servo, TonalBuzzer import time
Initializes the LED, PIR motion sensor, and tonal buzzer on their respective GPIO pins.
# GPIO pin setup for LED, motion sensor (PIR), and buzzer ledPin = LED(6) pirPin = MotionSensor(21) buzPin = TonalBuzzer(27)
Calculates the maximum and minimum pulse widths for the servo motor, incorporating a correction factor for fine-tuning.
# Servo motor pulse width correction factor and calculation myCorrection = 0.45 maxPW = (2.0 + myCorrection) / 1000 # Maximum pulse width minPW = (1.0 - myCorrection) / 1000 # Minimum pulse width
Initializes the servo motor on GPIO pin 25 with the custom pulse widths for accurate positioning.
# Initialize servo with custom pulse widths servoPin = Servo(25, min_pulse_width=minPW, max_pulse_width=maxPW)
The tune is defined as a sequence of notes (frequency) and durations (seconds).
# Musical tune for buzzer, with notes and durations tune = [('C#4', 0.2), ('D4', 0.2), (None, 0.2), ('Eb4', 0.2), ('E4', 0.2), (None, 0.6), ('F#4', 0.2), ('G4', 0.2), (None, 0.6), ('Eb4', 0.2), ('E4', 0.2), (None, 0.2), ('F#4', 0.2), ('G4', 0.2), (None, 0.2), ('C4', 0.2), ('B4', 0.2), (None, 0.2), ('F#4', 0.2), ('G4', 0.2), (None, 0.2), ('B4', 0.2), ('Bb4', 0.5), (None, 0.6), ('A4', 0.2), ('G4', 0.2), ('E4', 0.2), ('D4', 0.2), ('E4', 0.2)]
Function to move the servo to a specified angle. Converts the angle to a value between 0 and 1 for the servo.
def setAngle(angle): """ Move the servo to a specified angle. :param angle: Angle in degrees (0-180). """ value = float(angle / 180) # Convert angle to servo value servoPin.value = value # Set servo position time.sleep(0.001) # Short delay for servo movement
Function to play a musical tune using the buzzer. Iterates through the
tunelist, playing each note for its specified duration.def doorbell(): """ Play a musical tune using the buzzer. """ for note, duration in tune: buzPin.play(note) # Play the note time.sleep(float(duration)) # Duration of the note buzPin.stop() # Stop buzzer after playing the tune
Functions to open and close the door using the servo motor. The
opendoorfunction turns on the LED, opens the door, plays the tune, and then closes the door.def closedoor(): # Turn off LED and move servo to close door ledPin.off() for i in range(180, -1, -1): setAngle(i) # Move servo from 180 to 0 degrees time.sleep(0.001) # Short delay for smooth movement time.sleep(1) # Wait after closing door def opendoor(): # Turn on LED, open door (move servo), play tune, close door ledPin.on() for i in range(0, 181): setAngle(i) # Move servo from 0 to 180 degrees time.sleep(0.001) # Short delay for smooth movement time.sleep(1) # Wait before playing the tune doorbell() # Play the doorbell tune closedoor() # Close the door after the tune
Main loop that constantly checks for motion detection. When motion is detected, it triggers the
opendoorfunction.def loop(): # Main loop to check for motion and operate door while True: if pirPin.motion_detected: opendoor() # Open door if motion detected time.sleep(0.1) # Short delay in loop
Executes the main loop and ensures that the script can be stopped with a keyboard command (Ctrl+C), turning off the buzzer and LED for a clean exit.
try: loop() except KeyboardInterrupt: # Clean up GPIO on user interrupt (e.g., Ctrl+C) buzPin.stop() ledPin.off()