第3课:远程控制你的 GalaxyRVR
准备好掌控一切!在本课中,你将成为你自己的 GalaxyRVR 火星车的任务指挥官。
我们将把编码知识转化为实际操作,编程让您的火星车在模拟的火星地形上导航。看着你的指令让火星车生动起来,按照你的指挥在教室里移动。
这就是你的火星任务真正开始的地方——让我们开始驾驶吧!
学习目标
通过上传必要的 Arduino 代码,设置 Mammoth Coding 应用与你的 GalaxyRVR 之间的通信
掌握使用应用中的方向键界面控制火星车移动
编程并执行火星车的四种基本操作:前进、后退、左转和右转
连接应用到 GalaxyRVR
备注
如果你覆盖了固件且需要恢复通信,请参考 3. 更新 R3 板固件。
启动 GalaxyRVR。
首次使用 GalaxyRVR 前,请使用附带的 Type-C USB 线将电池充满电。
打开电源开关。
将模式切换到 Run 并按下 R3 板上的 Reset 按钮。
底部灯带将闪烁 绿色 ,表示启动成功。
将你的移动设备连接到 GalaxyRVR 的 WiFi 网络。
网络名称(SSID)为
GalaxyRVR,密码为12345678。如果看到”无互联网连接”的警告,请选择 “保持连接” 。

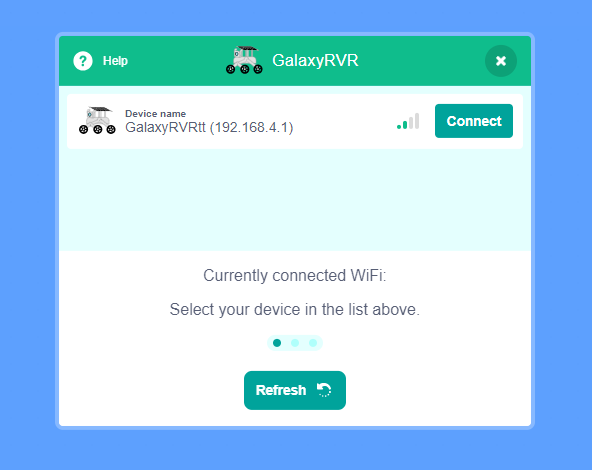
在你的移动设备上打开应用,开始连接过程。
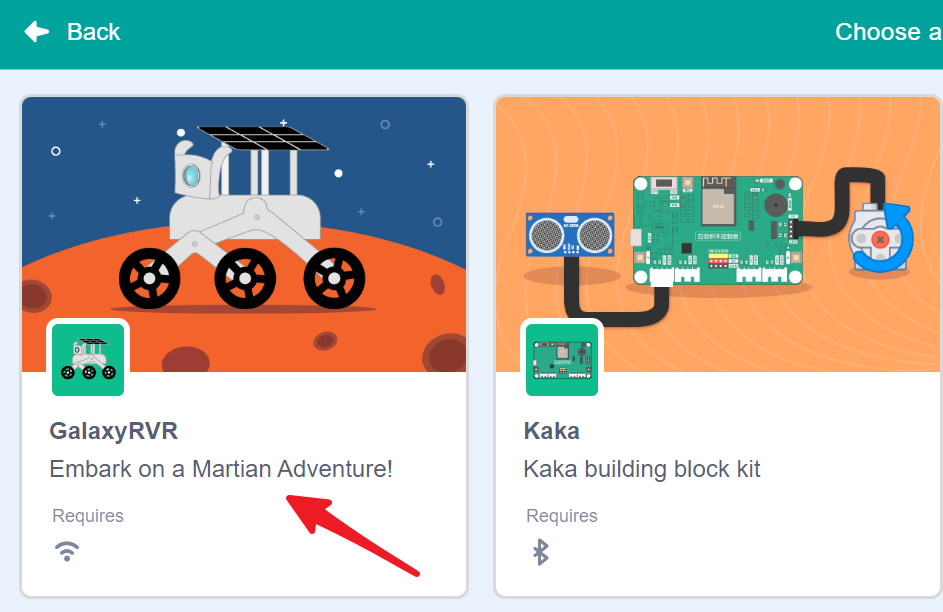
在应用中选择并加载 GalaxyRVR 扩展。
应用将自动扫描并搜索可用的 GalaxyRVR 设备。
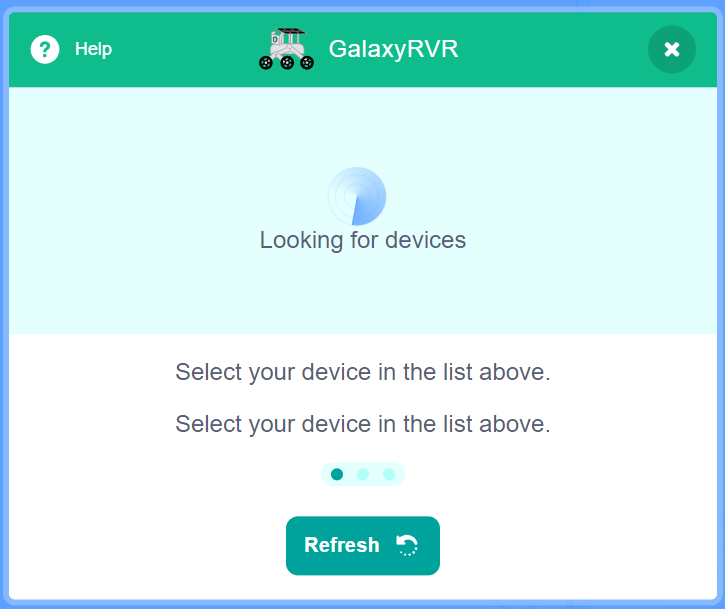
从列表中选择你的 GalaxyRVR 进行连接。
备注
连接状态由 GalaxyRVR 的 LED 灯指示:
闪烁紫色 :正在搜索连接
灯灭 :连接成功,准备就绪
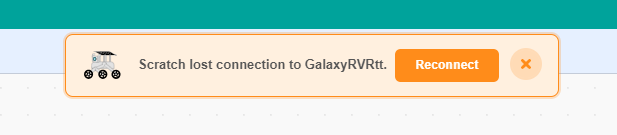
重新连接应用
当你的设备与 GalaxyRVR 断开连接时,界面上将弹出此窗口。点击重新连接。
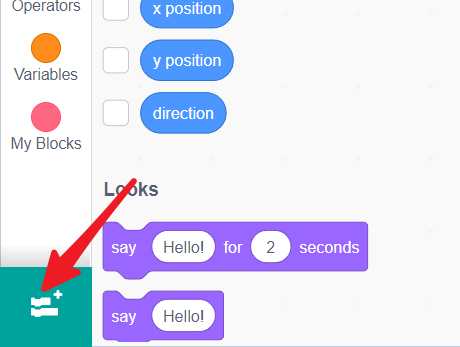
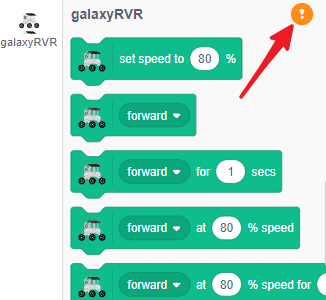
如果你关闭了弹出窗口,也可以通过点击 GalaxyRVR 分类中的此按钮重新连接。
找到你的 GalaxyRVR 并点击连接。
通过应用控制 GalaxyRVR
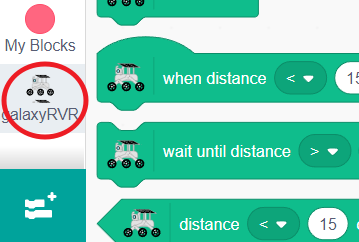
在编码界面中,找到包含所有火星车控制积木块的专用 GalaxyRVR 分类。
虽然我们通常使用绿旗来启动程序,但也有其他方式触发操作。在事件分类中找到
当按下上箭头键积木块——它会在你按下该键时执行代码。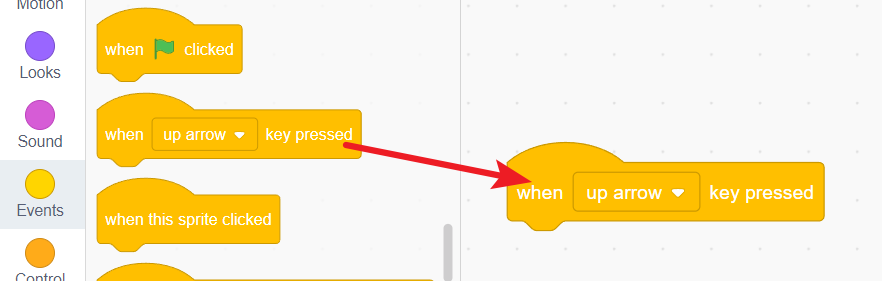
创建四个事件积木块——每个箭头方向对应一个(上、下、左、右)。这将构成火星车控制系统的基础。

备注
需要更多编码空间?点击绿旗下方的眼睛图标可暂时隐藏舞台区域。
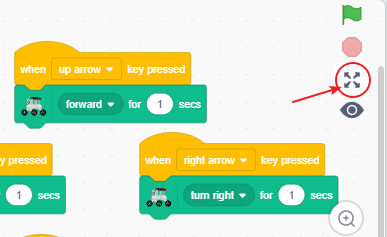
现在用相应的移动命令完成每个事件积木块:
上箭头 → 前进
下箭头 → 后退
左箭头 → 左转
右箭头 → 右转

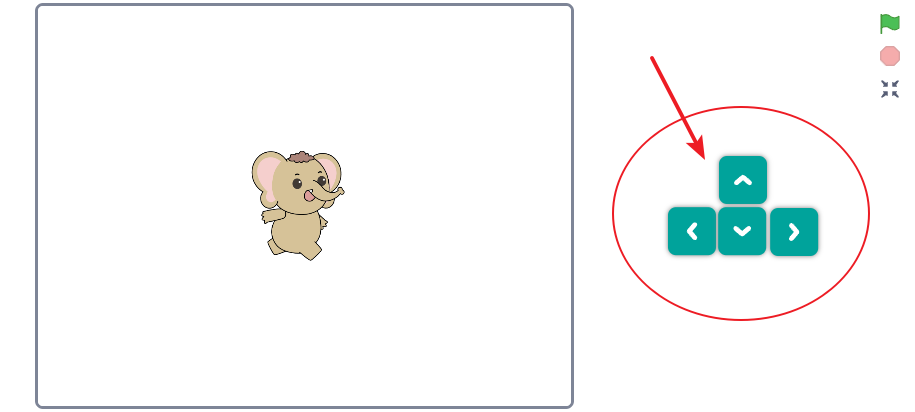
点击舞台展开按钮,进入全控制模式。
你现在将看到一个放大的舞台,带有虚拟方向键。按下这些键,你将实时直接控制你的 GalaxyRVR 的移动!
移动控制积木块
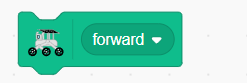
基本方向控制
控制 GalaxyRVR 的移动方向。使用下拉菜单选择前进、后退、左转或右转。
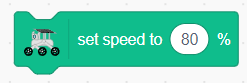
速度设置
设置 GalaxyRVR 的移动速度。注意:此积木块仅设置速度,本身不会启动移动。
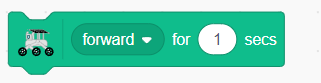
定时移动
使 GalaxyRVR 沿所选方向移动特定时长。你可以:
从下拉菜单中选择方向(前进/后退/左转/右转)
更改时间值来设置移动时长
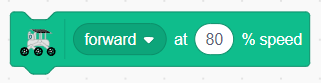
速度控制移动
以特定速度百分比移动 GalaxyRVR。你可以:
从下拉菜单中选择移动方向
调整速度百分比(0-100%)
精确移动控制
结合速度和时间控制,实现精确移动。你可以:
设置移动方向
调整速度百分比
设置移动时长

高级车轮控制
独立控制每个车轮,实现复杂操作。你可以:
分别设置左轮速度
分别设置右轮速度
控制移动时长

紧急停止
立即停止 GalaxyRVR 的所有移动。