常见问题
1. 为什么要更新固件?
SunFounder 持续改进 GalaxyRVR 的固件,以提供更好的使用体验。我们建议在首次使用前更新固件,以确保一切运行顺畅。更新固件可确保:
Bug 修复:解决已知问题,提高稳定性。
App 兼容性:RoboPilot App 和 Mammoth Coding 需要最新固件才能正常工作。
新功能:固件更新可能会添加新的功能和改进。
更佳性能:优化 WiFi 连接、摄像头视频流和电机控制。
有关详细的分步说明,请参阅 更新固件。
备注
如果您不想更新固件并希望继续使用当前配置,可以参考 GalaxyRVR v1 文档。
2. 无法连接到 GalaxyRVR?
如果您无法连接到 GalaxyRVR,请检查以下项目:
检查电池:查看火星车上的电池指示灯。如果两个 LED 都熄灭,说明电池电量不足。请使用 Type-C USB 线为火星车充电。
检查 ESP32 CAM:确保 ESP32 CAM 正确插入其插槽。如果 ESP32 CAM LED 不亮,则摄像头模块可能未通电或已损坏。ESP32 CAM 负责创建 WiFi 热点——如果它不工作,将不会出现任何网络。
检查模式开关:确保模式开关设置为 Run**(而非 **Upload)。WiFi 热点仅在 Run 模式下工作。

重置 R3 板:切换到 Run 模式后,按下 R3 板上的 Reset 按钮。底部灯带应闪烁以表示启动成功。
检查 WiFi 密码:默认热点名称(SSID)为
GalaxyRVR,密码为12345678。请确保正确输入密码。WiFi 干扰:同一 WiFi 频道上的其他设备可能导致连接问题。如果您怀疑存在干扰,请尝试 更改 WiFi 频道。
固件更新后:如果您刚刚更新了 ESP32 CAM 固件且 WiFi 停止工作,请参阅 12. 如何将 ESP32 CAM 恢复出厂设置?。
验证移动设备的连接:如果您以 AP 模式(默认)使用 GalaxyRVR,请将移动设备连接到 GalaxyRVR 热点。如果您已 配置家庭 Wi-Fi 网络,请确保您的移动设备连接到**相同的**家庭 Wi-Fi 网络。
3. 底部灯带呈稳定橙色且找不到 WiFi 热点?
如果 GalaxyRVR 的底部灯带显示**稳定的橙色灯光**,且 GalaxyRVR WiFi 网络不出现,原因是**固件版本不匹配**:
ESP32 CAM 固件仍为旧版本(1.4.x 或 1.3.x)
**UNO R3 板**固件已更新至 2.x 版本
版本不匹配导致 ESP32 CAM 和 UNO R3 之间无法通信
要解决此问题,请按**以下确切顺序**操作:
首先将 UNO R3 固件回退至 1.x 版本:
请参考 v1 文档中的指南:GalaxyRVR v1 — 如何上传 galaxy-rvr.ino 代码
按照 ESP32 CAM → UNO R3 的顺序更新两个固件:
请参考更新指南:更新固件
备注
顺序很重要——始终先更新 ESP32 CAM,再更新 R3 板。跳过回退步骤或更改顺序将无法解决问题。
4. RoboPilot App 无法连接?
如果 RoboPilot App 无法找到或连接到您的 GalaxyRVR,请检查以下项目:
ESP32 CAM 固件是否最新? 过旧的 ESP32 CAM 固件可能导致连接问题。请按照 2. 更新 ESP32 CAM 固件 进行检查和更新。
R3 固件是否最新? R3 板上必须安装出厂通信固件。如果您上传了自定义 Arduino 代码,它将覆盖此固件并中断 RoboPilot 通信。请按照 3. 更新 R3 板固件 进行恢复。
模式开关是否在 Run? 模式开关必须设置为 **Run**(而非 Upload),WiFi 热点才能工作。
您的移动设备是否连接到正确的 WiFi 网络? 连接到 GalaxyRVR 热点(
GalaxyRVR/12345678),或者如果您配置了家庭 WiFi,请连接到同一网络。尝试重置:切换到 Run 模式并按下 Reset 按钮,然后重新尝试连接。
如果以上方法均无效,请尝试 12. 如何将 ESP32 CAM 恢复出厂设置?。
5. Mammoth Coding (Scratch) App 无法连接?
如果 Mammoth Coding 无法连接到您的 GalaxyRVR,请检查以下项目:
ESP32 CAM 固件是否最新? ESP32 CAM 负责处理 Mammoth Coding 所依赖的 WiFi 连接。请按照 2. 更新 ESP32 CAM 固件 确保其为最新版本。
R3 固件是否最新? Mammoth Coding 需要 R3 板上的出厂通信固件。如果您上传了自己的 Arduino 代码,通信固件已被覆盖。请按照 3. 更新 R3 板固件 进行恢复。
模式开关是否在 Run? 模式开关必须设置为 Run,WiFi 热点才能激活。
您的移动设备是否连接到正确的 WiFi 网络? 确保您的设备已连接到 GalaxyRVR 热点或火星车上配置的同一家庭 WiFi 网络。
备注
如果您想**同时**使用 Arduino 编程和 Mammoth Coding,请注意每次切换时都需要重新上传 R3 固件。
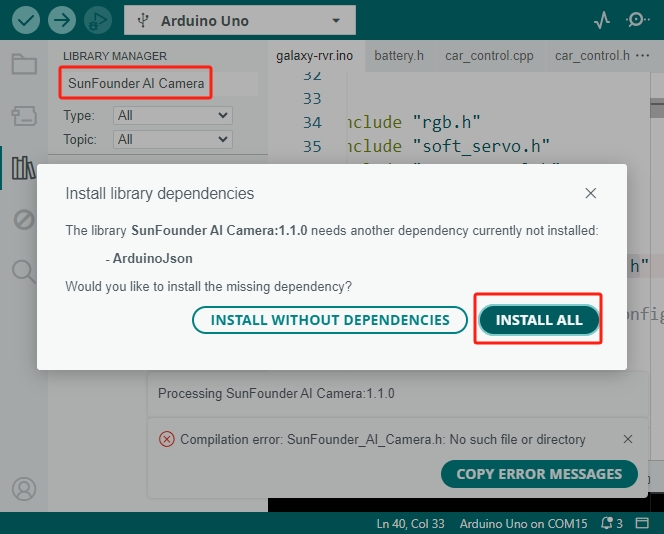
6. 编译错误:SoftPWM.h 或 SunFounder_AI_Camera.h:No such file or directory?
如果您看到”编译错误:SoftPWM.h:No such file or directory”提示,说明您尚未安装 SoftPWM 库。
请按图示安装所需的两个库:SoftPWM 和 SunFounder AI Camera。
对于 SunFounder AI Camera 库,您需要选择”INSTALL ALL”以同时安装所需的 ArduinoJson 依赖。
7. avrdude: stk500_getsync() attempt 10 of 10: not in sync: resp=0x6e?
如果在正确选择了板和端口后,点击**上传**按钮时仍然持续出现以下消息:
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 1 of 10: not in sync: resp=0x00
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 2 of 10: not in sync: resp=0x00
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 3 of 10: not in sync: resp=0x00
此时,您需要确保 ESP32 CAM 已拔下。
ESP32-CAM 和 Arduino 板共用相同的 RX(接收)和 TX(发送)引脚。因此,在上传代码之前,您需要先断开 ESP32-CAM 的连接,以避免任何冲突或潜在问题。

代码成功上传后,如果您需要使用 ESP32 CAM,则需要将开关拨到左侧以启动 ESP32 CAM。
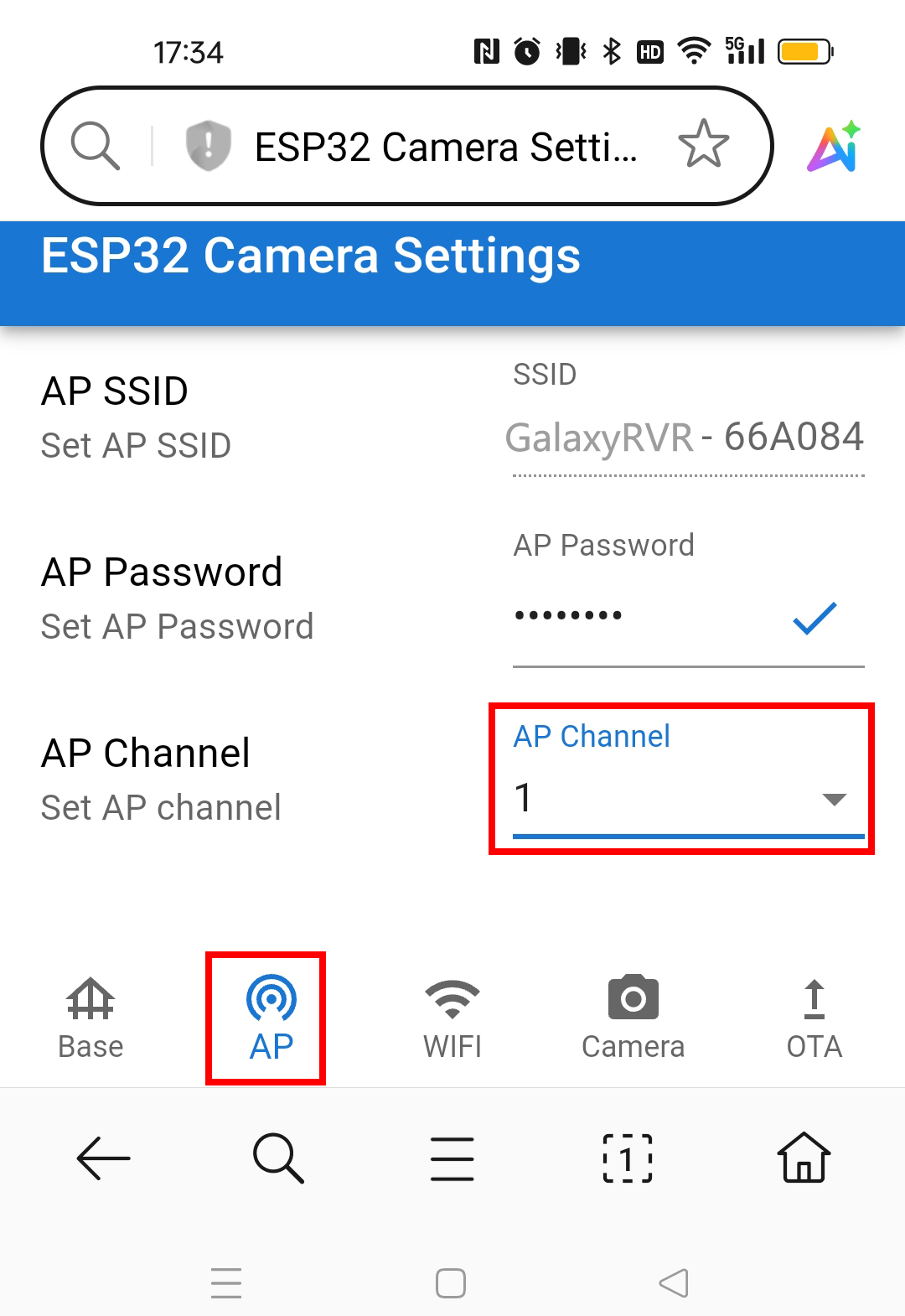
8. 如何更改 Wi-Fi 频道?
2.4GHz Wi-Fi 频段的频道范围为 1 到 13。ESP32 支持频道 1 到 11。同一频道上的其他设备可能造成干扰,导致连接问题。为解决此问题,您可以尝试更改频道。默认情况下,频道设置为 1。选择新频道时,建议每次跳过 1-2 个频道。例如,如果当前频道为 1,请先尝试频道 3,如果信号仍然不佳,再继续尝试频道 5。
打开 GalaxyRVR 电源。要激活 ESP32 CAM,请将模式开关拨到 Run 位置,然后按下 reset 按钮重启 R3 板。
将您的移动设备连接到 GalaxyRVR 的 WiFi 网络。
网络名称(SSID)为
GalaxyRVR,密码为12345678。如果看到提示”无互联网访问”,请选择 “保持连接” 选项。

在移动设备上打开网页浏览器,访问地址
http://192.168.4.1。这将进入 ESP32-CAM 固件更新门户。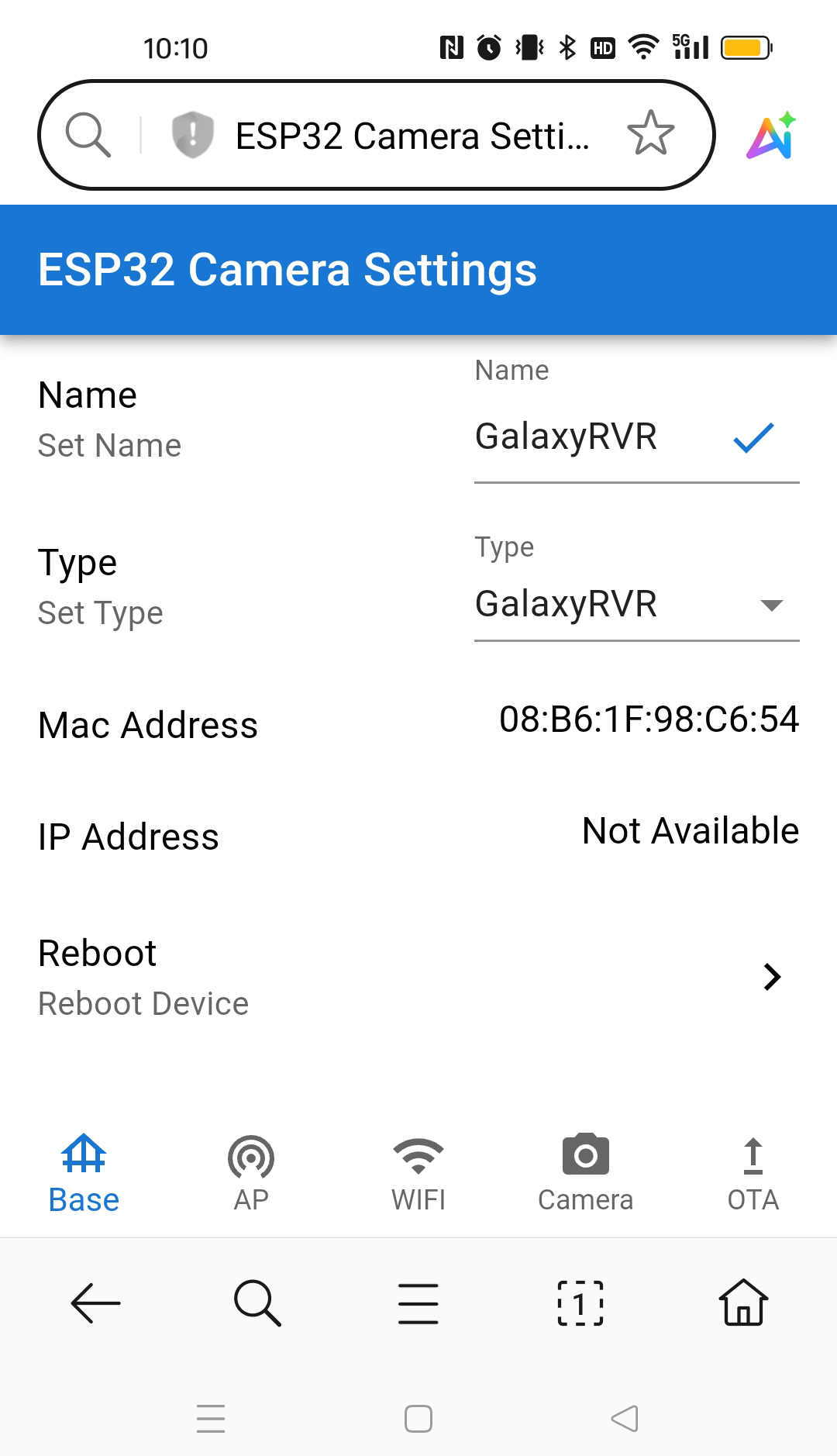
在 AP 页面下,选择一个不同的频道。
默认频道为 1。选择新频道时,每次跳过 1-2 个频道(例如,从频道 1 到 3,如有需要再到 5)。
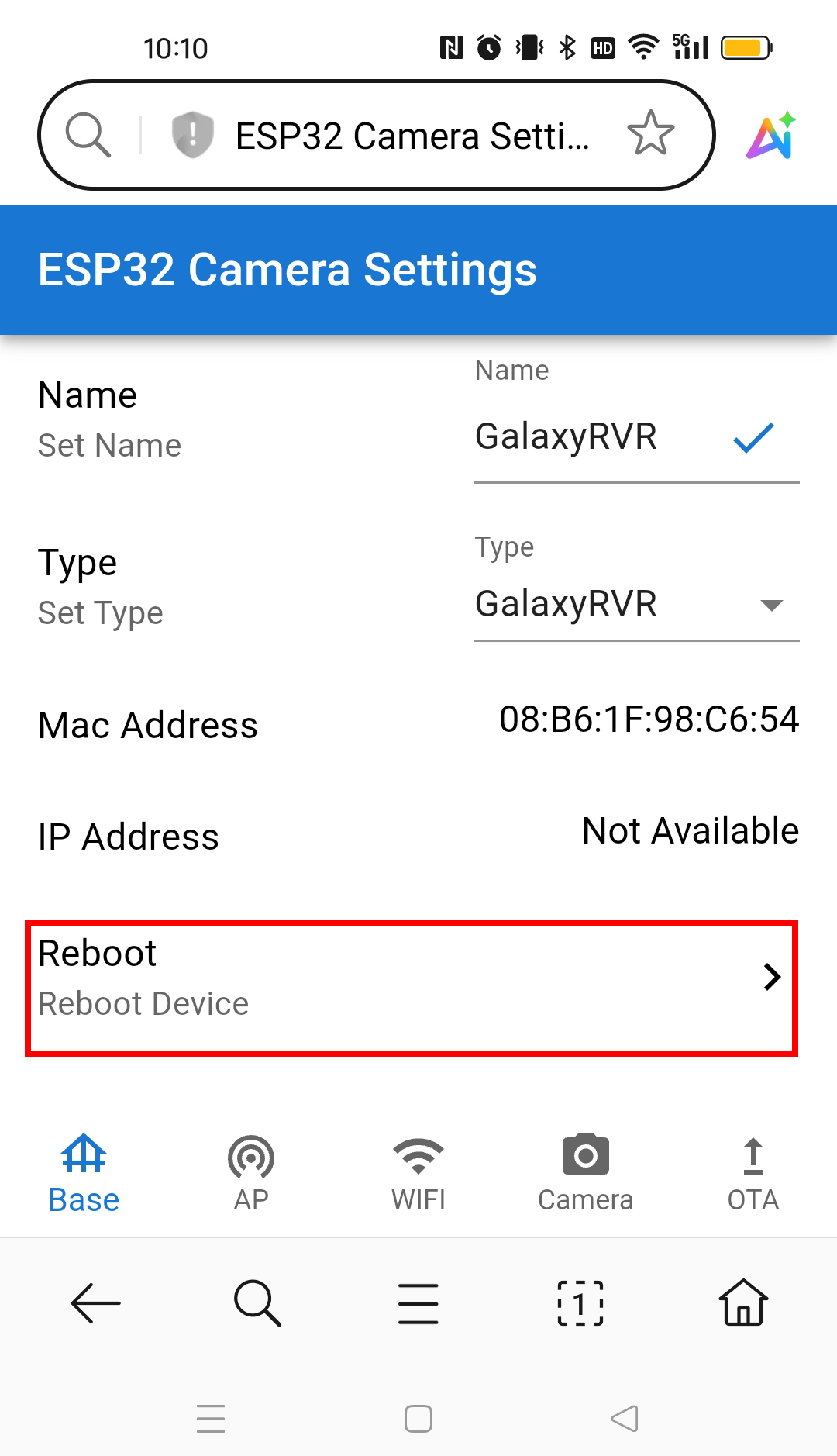
返回到 Base 页面,点击 Reboot 按钮重启 GalaxyRVR。GalaxyRVR 现在即可正常运行。
9. 如何更新 ESP32 CAM 固件
为确保 App 兼容性和最佳性能,请确保您的 ESP32 CAM 固件为最新版本。
有关详细的分步说明,请参阅:2. 更新 ESP32 CAM 固件
10. 如何恢复 R3 固件
GalaxyRVR 的 R3 板搭载了支持 RoboPilot App 和 Mammoth Coding 的固件。
如果您已覆盖此固件并需要恢复通信,请按照 3. 更新 R3 板固件 进行操作。
11. 如何设置 Wi-Fi 连接
默认情况下,GalaxyRVR 以 AP 模式 运行,即创建自己的 Wi-Fi 热点供其他设备连接。
如果您希望 GalaxyRVR 连接到您的**家庭 Wi-Fi 网络**,请按照以下步骤操作:
打开 GalaxyRVR 电源。要激活 ESP32 CAM,请将模式开关拨到 Run 位置,然后按下 reset 按钮重启 R3 板。
将您的移动设备连接到 GalaxyRVR 的 WiFi 网络。
网络名称(SSID)为
GalaxyRVR,密码为12345678。如果看到提示”无互联网访问”,请选择 “保持连接” 选项。
在移动设备上打开网页浏览器,访问地址
http://192.168.4.1。这将进入 ESP32-CAM 固件更新门户。
在 WiFi 页面下,输入您的家庭 WiFi 网络名称(SSID)和密码。
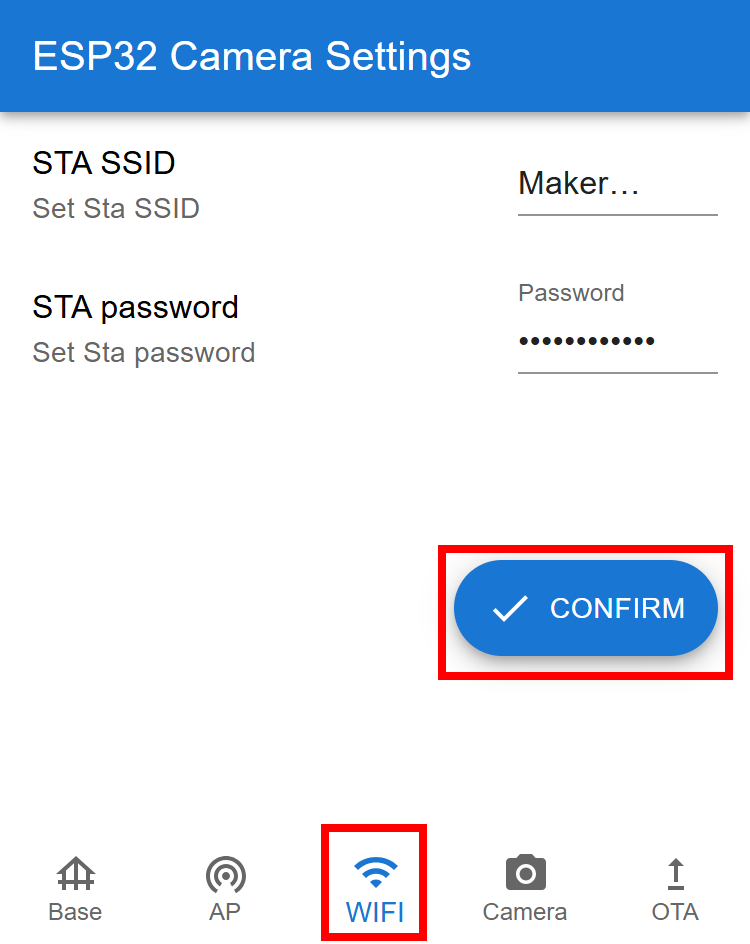
点击 CONFIRM 按钮。
GalaxyRVR 将尝试连接到您的家庭 Wi-Fi。
如果连接成功,旋转图标将停止并显示对勾标记。
重启后,将您的移动设备连接到同一家庭 Wi-Fi 网络。
您现在可以通过 RoboPilot App 或 Mammoth Coding 连接到 GalaxyRVR。
12. 如何将 ESP32 CAM 恢复出厂设置?
如果更新 ESP32 CAM 固件后 GalaxyRVR 的 WiFi 热点不出现或无法连接,可能是 ESP32 CAM 闪存中存储的旧 WiFi 配置数据导致冲突。
要解决此问题,您需要通过清除存储的数据将 ESP32 CAM 恢复出厂设置。此操作通过短接 ESP32 CAM 上的 IO13 和 IO15 引脚完成:
关闭 GalaxyRVR 的电源开关。
找到 ESP32 CAM 模块上的 IO13 和 IO15 引脚。
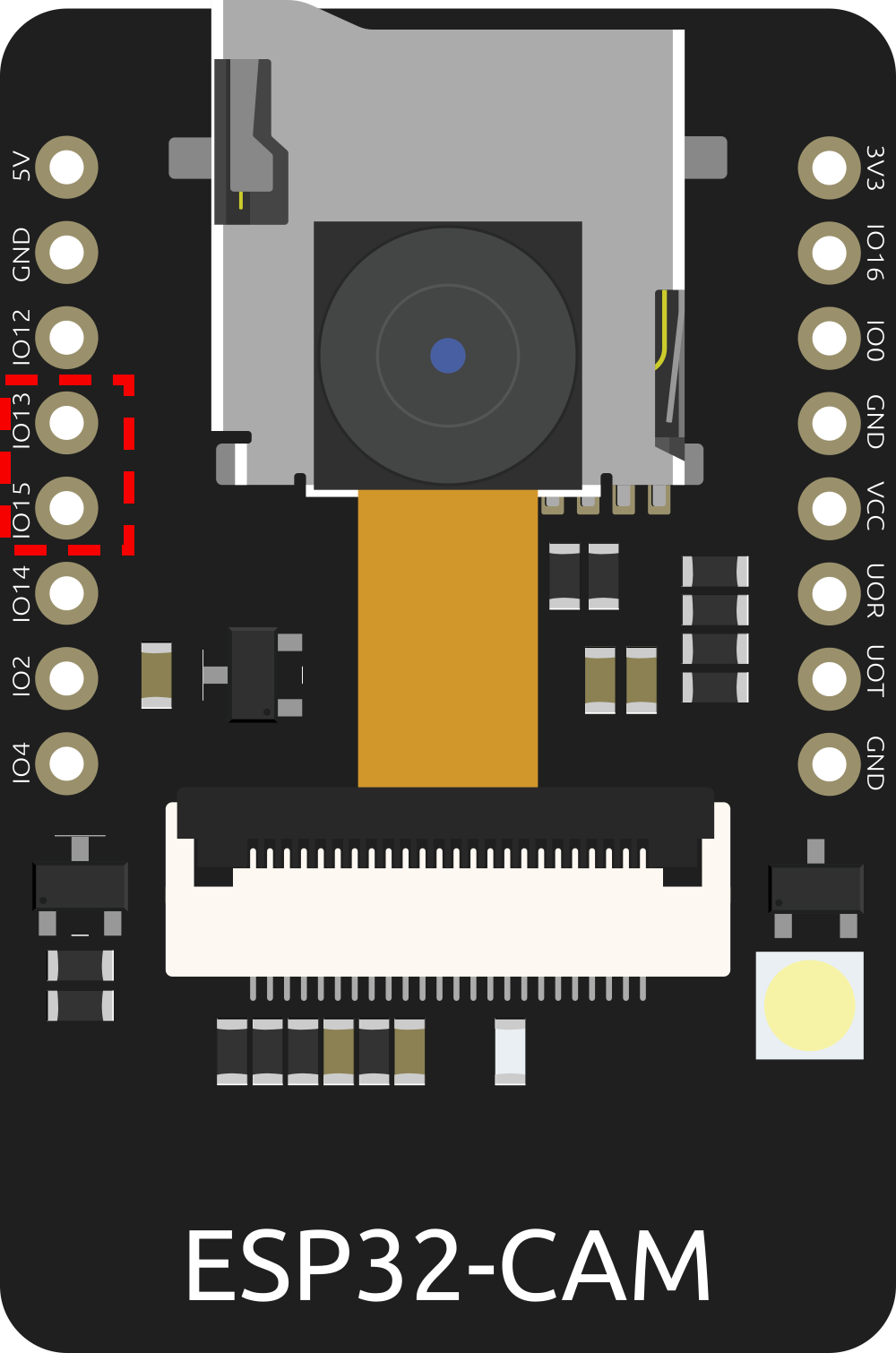
使用跳线或镊子将 IO13 和 IO15 引脚短接(连接)在一起。
保持引脚短接状态,打开 GalaxyRVR 的电源开关。
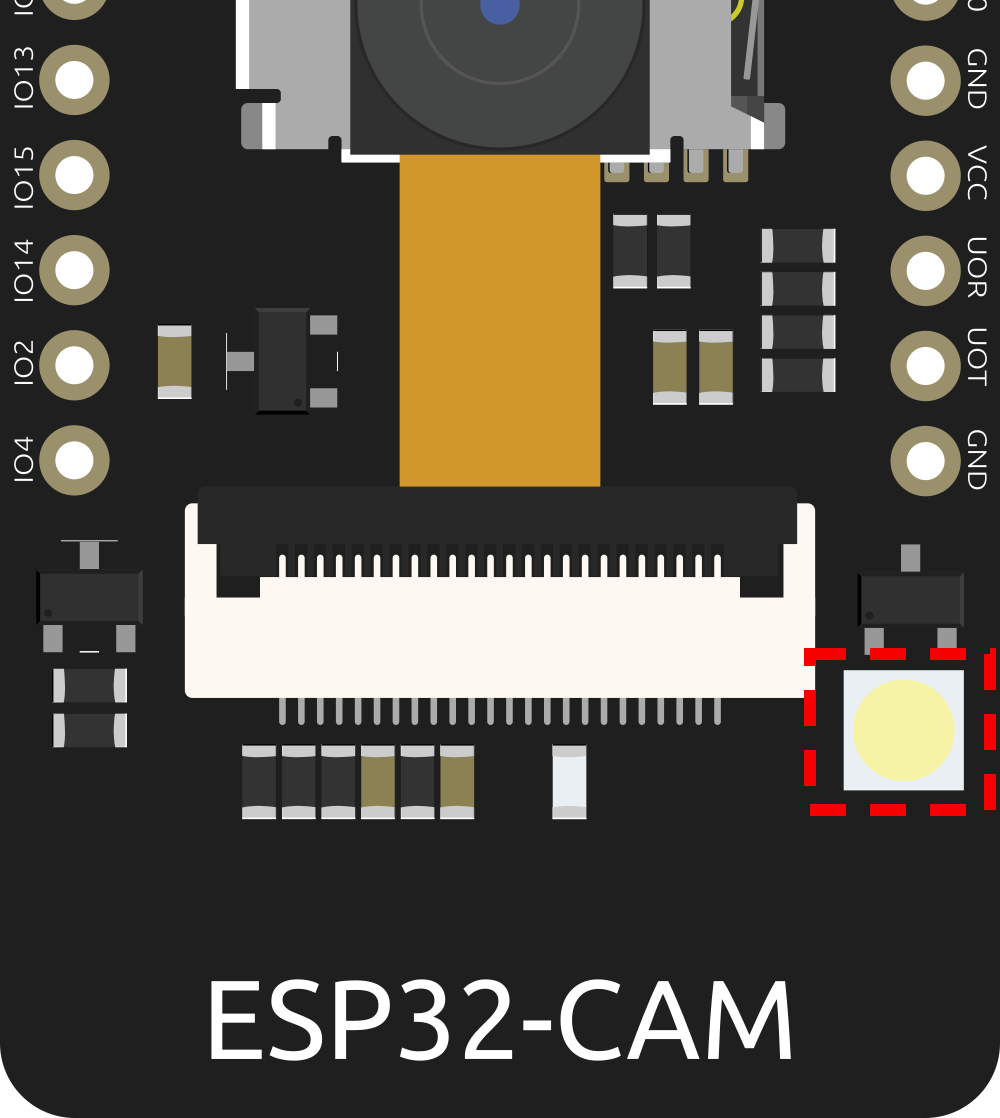
观察 ESP32 CAM LED——当它**快速闪烁两次**时,移除跳线。
将模式切换到 Run 并按下 R3 板上的 Reset 按钮。
ESP32 CAM 将清除配置后启动。您应该在设备的 WiFi 列表中看到一个名为
AI Camera-xxxxxx``(其中 ``xxxxxx是唯一标识符)的热点。使用密码12345678连接。重启 GalaxyRVR 后,热点名称将从
AI Camera-xxxxxx变回GalaxyRVR-xxxxxx,表示出厂设置已成功恢复。
备注
恢复出厂设置后,您需要重新配置任何之前保存的家庭 WiFi 设置(11. 如何设置 Wi-Fi 连接)。