更新固件
由于产品持续改进,您的设备可能未搭载最新固件。 我们建议在首次使用前更新固件,以确保一切运行顺畅。更新固件可确保:
Bug 修复:解决已知问题,提高稳定性。
App 兼容性:RoboPilot App 和 Mammoth Coding 需要最新固件才能正常工作。
新功能:固件更新可能会添加新的功能和改进。
更佳性能:优化 WiFi 连接、摄像头视频流和电机控制。
备注
如果您不想更新固件并希望继续使用当前配置,可以参考 GalaxyRVR v1 文档 。
1. 检查是否需要更新
启动 GalaxyRVR 并检查底部灯带。
首次使用 GalaxyRVR 前,请使用附带的 Type-C USB 线将电池充满电。
打开电源开关。
将模式切换到 Run 并按下 R3 板上的 Reset 按钮。
底部灯带将开始闪烁,表示启动成功。
检查底部灯带。
如果底部灯带显示 绿色闪烁灯光 ,则您的 ESP32 固件已是最新。您可以继续前往 快速开始 。
如果底部灯带闪烁 其他颜色 ,您将需要:
2. 更新 ESP32 CAM 固件
ESP32 CAM 负责广播 Wi-Fi 热点并为 GalaxyRVR 采集视频。 如果固件过旧,这些功能可能无法正常工作。请按照以下步骤更新固件。
打开 GalaxyRVR 的电源开关。要启动 ESP32 CAM,请将模式切换到 Run 并按下 R3 板上的 Reset 按钮。

下载固件文件。
解压下载的 ZIP 文件。找到名为
ai-camera-firware.ino.x.x.x.bin的固件文件,并将其传输到您的移动设备。您可以使用任何文件管理器应用,例如 ES 文件浏览器或文件传输工具。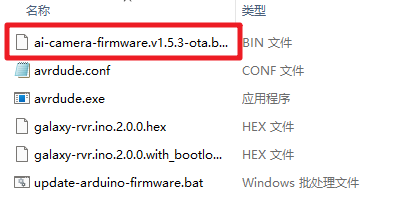
将您的移动设备连接到 GalaxyRVR 的 WiFi 网络。
网络名称(SSID)为
GalaxyRVR,密码为12345678。如果看到提示”无互联网访问”,请选择 “保持连接” 选项。

在移动设备上打开网页浏览器,访问
http://192.168.4.1进入 ESP32 CAM OTA 更新页面。
备注
在此页面上,您会看到两种界面之一的 OTA 升级选项。版本 A(前者)和版本 B(后者)会根据您的固件版本显示。请根据您看到的界面选择相应的升级步骤。

版本 A
在 OTA 页面上,点击按钮选择固件文件。

从设备中选择之前下载的
ai-camera-firmware-vX.X.X-ota.bin文件,然后点击 Add 。
点击 Update 按钮开始固件更新过程。

等待更新完成。

更新完成后,您可以关闭网页浏览器。按下 Reset 按钮重启设备。ESP32 CAM 现在即可正常运行。

备注
更新完成后,GalaxyRVR 的 WiFi 热点名称将更改为 “AI Camera-xxxxxx”,密码仍为 “12345678”。
版本 B
在 OTA 页面上,查看网页上显示的当前固件版本。
如果您的版本号 高于 1.5.1 ,则无需更新。您可以跳过剩余步骤,直接前往 快速开始 。
如果版本为 1.5.1 或更低 ,请继续更新。

点击 Upgrade Firmware 按钮。

将出现文件选择对话框。找到并选择您之前传输到移动设备的
ai-camera-firware.ino.x.x.x.bin文件。
选择文件后,固件更新将立即开始。

等待固件升级完成。
上传过程通常需要 1-2 分钟。完成后,弹出窗口中将显示成功消息。
您可以选择 CONFIRM 重启 GalaxyRVR 或选择 CLOSE 关闭窗口。

3. 更新 R3 板固件
R3 板包含内置固件,用于实现与 RoboPilot APP 和 Mammoth Coding 的通信。
在以下情况下,您需要重新上传此固件:
您的设备使用较旧的固件版本,或
您已烧录了自己的 Arduino 代码并希望恢复兼容性。
请按照以下步骤重新安装通信固件。
使用 USB 线连接 Arduino 和计算机,然后将车的 upload 开关拨到上传端。

备注
连接 Arduino 的是 USB Type B 端口,而非用于充电的 USB Type C 端口。
检查固件文件是否已下载。
运行更新脚本
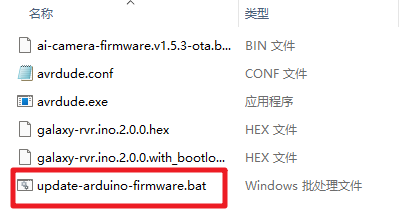
打开
galaxy-rvr.ino.xxx文件夹(在上一步中下载并安装)。双击
update-arduino-firmware.bat脚本。命令提示符窗口将自动出现。
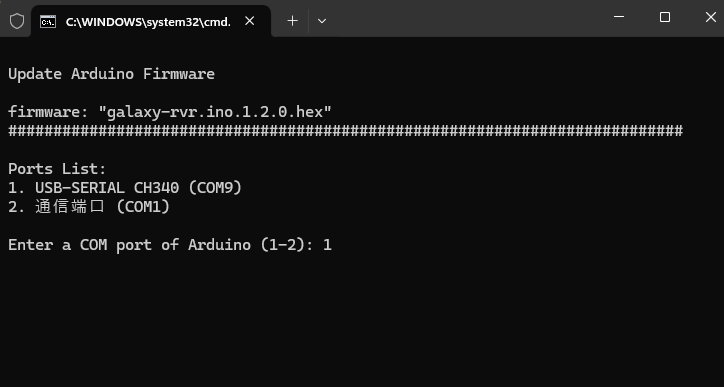
选择串口并上传
在命令提示符中,将显示可用串口列表。
输入左侧显示的序列号以选择 Arduino Uno 的串口。
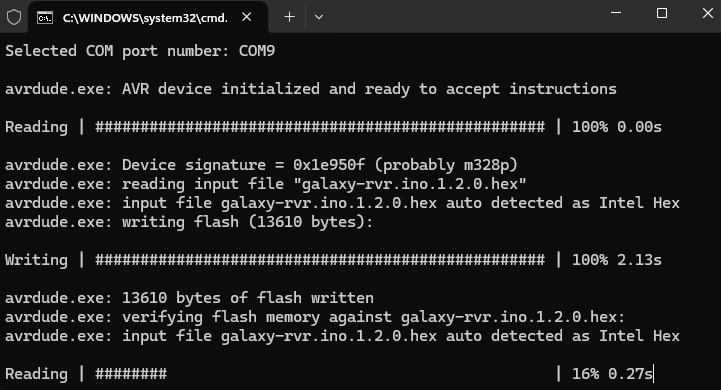
按 Enter 开始自动上传。
示例:如果列表显示 1 USB-SERIALXXX (COMxx),输入 1 并按 Enter 。
等待上传完成后,即可拔掉 USB 线。
备注
此代码使 GalaxyRVR 能够响应 APP 命令。在使用 RoboPilot 遥控 APP 或 Mammoth Coding 软件时,您无需上传任何额外代码。
现在您可以前往 快速开始 开始您的 GalaxyRVR 之旅!