注釈
こんにちは。 Facebook の SunFounder Raspberry Pi & Arduino & ESP32 愛好者 コミュニティ へ ようこそ! 仲間 の 愛好者 と 一緒 に Raspberry Pi、 Arduino、 ESP32 を さらに 深く 探求 しましょう。
なぜ 参加 する の です か?
専門的 な サポート : コミュニティ と チーム の 支援 に より、 購入 後 の 問題 や 技術的 な 課題 を 解決 できます。
学習 と 共有 : ヒント や チュートリアル を 交換 し、 スキル を 向上 させましょう。
限定 プレビュー : 新製品 の 発表 や 先行 情報 に いち早く アクセス できます。
特別 割引 : 最新 製品 を 対象 に した 限定 割引 を 利用 できます。
イベント プロモーション と プレゼント : プレゼント 企画 や 祝日 キャンペーン に 参加 できます。
👉 私たち と 一緒 に 探索 と 創作 を 始める 準備 は できました か? [here] を クリック して、 今すぐ 参加 しましょう!
超音波 センサー モジュール
概要
超音波 センサー モジュール は、 超音波 を 使用 して 高い 精度 で 距離 を 測定 します。 超音波 を 発信 し、 反射 して 戻って くる エコー を 受信 する まで の 時間 から 距離 を 計算 します。 この 汎用 的 な 技術 は、 ロボット、 障害物 検知、 距離 測定 など の 用途 で 広く 使用 されて います。
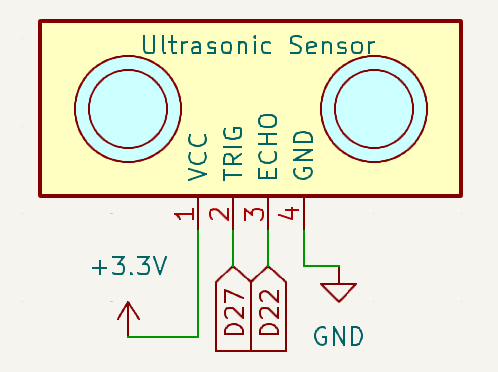
回路 図
以下 は、 超音波 センサー モジュール の 回路 図 です:
配線 図
以下 の 図 に 示す とおり に 回路 を 組み立て て ください:
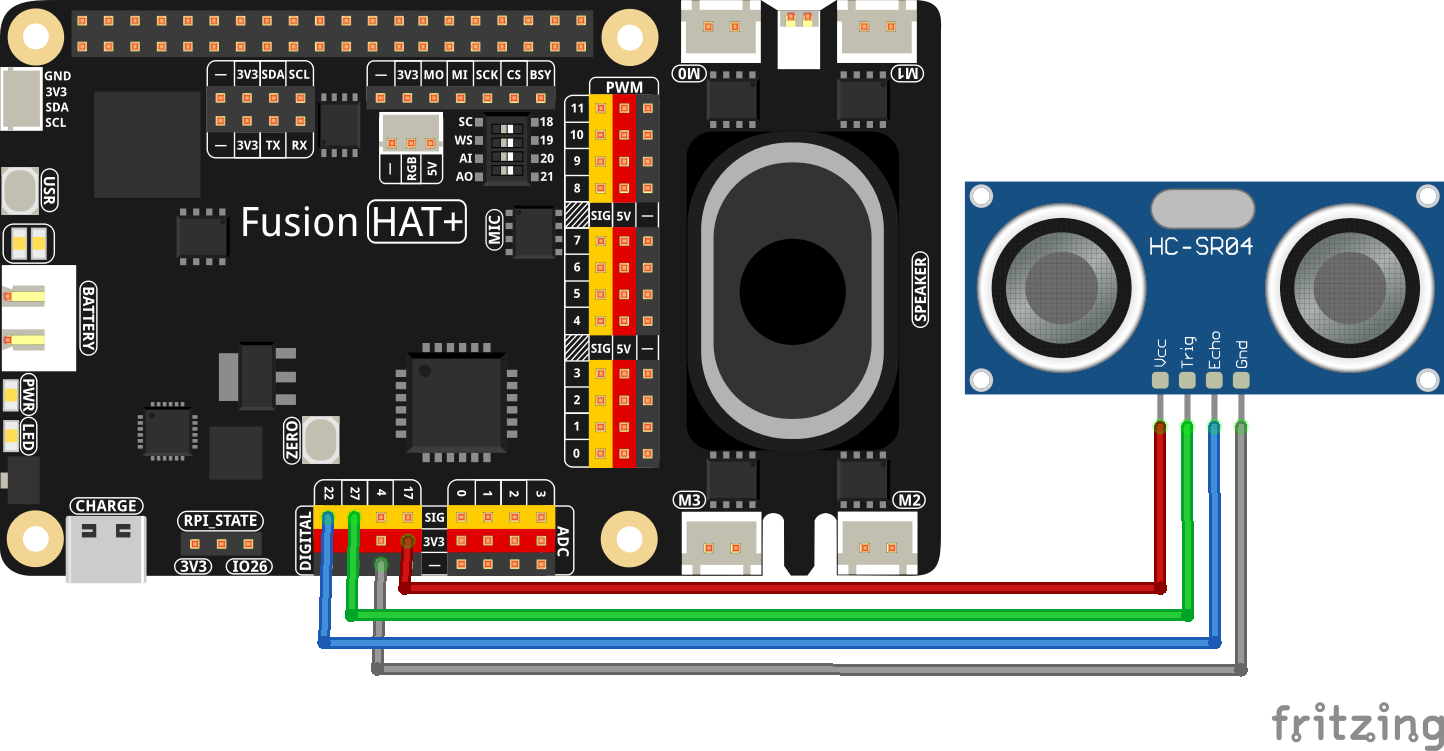
配線 が 確実 に 接続 されて いる こと を 確認 し、 Echo ピン を Raspberry Pi の GPIO 22、 Trigger ピン を GPIO 27 に 接続 して ください。
コード
以下 は、 この プロジェクト 用 の Python コード です:
# Import Ultrasonic and Pin class
from fusion_hat.modules import Ultrasonic
from fusion_hat.pin import Pin
from time import sleep
# Create Ultrasonic object
sensor = Ultrasonic(Pin(27), Pin(22))
try:
# Main loop to continuously measure and report distance
while True:
dis = sensor.read() # Measure distance in centimeters
print('Distance: {:.2f} cm'.format(dis)) # Print the distance with two decimal precision
sleep(0.3) # Wait for 0.3 seconds before the next measurement
except KeyboardInterrupt:
# Handle KeyboardInterrupt (Ctrl+C) to gracefully exit the loop
pass
この Python スクリプト は、 超音波 距離 センサー を 使用 して 物体 まで の 距離 を 測定 し、 結果 を コンソール に 表示 します。 実行 すると:
GPIO ピン 27( Trigger ) と 22( Echo ) に 接続 された センサー が、 最も 近い 物体 まで の 距離 を 継続 的 に 測定 します。
距離 は メートル で 計算 された 後、 センチメートル に 変換 され、
Distance: <value> cmの 形式 で 小数 点 以下 2 桁 の 精度 で 表示 されます。距離 は 0.3 秒 ごと に 更新 され、 ほぼ リアルタイム で の 監視 が 可能 です。
プログラム は
Ctrl+Cで 割り込み が 行われる まで 継続 的 に 実行 され、 割り込み 時 に は 正常 に 終了 します。