注釈
こんにちは。 Facebook の SunFounder Raspberry Pi & Arduino & ESP32 愛好者 コミュニティ へ ようこそ! 仲間 の 愛好者 と 一緒 に Raspberry Pi、 Arduino、 ESP32 を さらに 深く 探求 しましょう。
なぜ 参加 する の です か?
専門的 な サポート : コミュニティ と チーム の 支援 に より、 購入 後 の 問題 や 技術的 な 課題 を 解決 できます。
学習 と 共有 : ヒント や チュートリアル を 共有 し、 スキル を 向上 させましょう。
限定 プレビュー : 新製品 の 発表 や 先行 情報 に いち早く アクセス できます。
特別 割引 : 最新 製品 を 対象 に した 限定 割引 を 利用 できます。
イベント プロモーション と プレゼント : プレゼント 企画 や 祝日 キャンペーン に 参加 できます。
👉 私たち と 一緒 に 探索 と 創作 を 始める 準備 は できました か? [here] を クリック して、 今すぐ 参加 しましょう!
モーター
はじめに
この プロジェクト では、 Fusion HAT+ を 使用 して DC モーター を 制御 し、 正転 および 逆転 させる 方法 を 学びます。
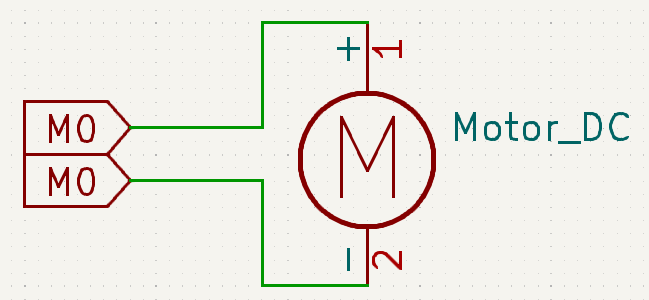
回路 図
以下 の 回路 図 は、 モーター を 制御 する ため に 必要 な 配線 接続 を 示しています。
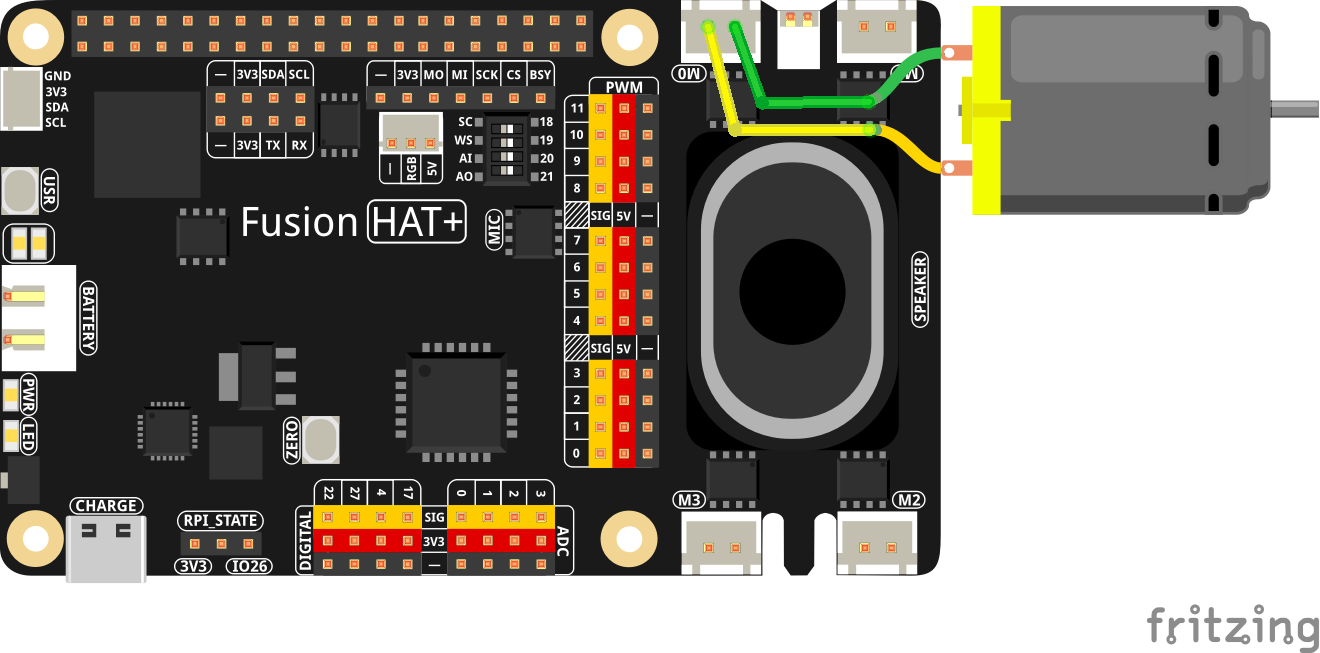
配線 図
コード
以下 の Python コード は、 モーター の 回転 方向 と 動作 タイミング を 制御 します:
#!/usr/bin/env python3
# Import sleep function to pause execution
from time import sleep
# Import Motor class from the fusion_hat.motor module
from fusion_hat.motor import Motor
# Create a Motor object for motor port 'M0'
# is_reversed=True means the motor direction is inverted
motor = Motor('M0', is_reversed=True)
try:
# Loop forever
while True:
motor.power(0) # Stop the motor
sleep(0.5) # Wait 0.5 seconds
motor.power(-50) # Run the motor at -50% power
sleep(1) # Run for 1 second
motor.power(0) # Stop again
sleep(0.5) # Wait 0.5 seconds
motor.power(75) # Run the motor at 75% power
sleep(1) # Run for 1 second
finally:
motor.stop() # Ensure the motor is stopped on exit
sleep(.1) # Short delay for safety