注釈
こんにちは。 Facebook の SunFounder Raspberry Pi & Arduino & ESP32 愛好者 コミュニティ へ ようこそ! 仲間 の 愛好者 と 一緒 に Raspberry Pi、 Arduino、 ESP32 を さらに 深く 探求 しましょう。
なぜ 参加 する の です か?
専門的 な サポート : コミュニティ と チーム の 支援 に より、 購入 後 の 問題 や 技術的 な 課題 を 解決 できます。
学習 と 共有 : ヒント や チュートリアル を 共有 し、 スキル を 向上 させましょう。
限定 プレビュー : 新製品 の 発表 や 先行 情報 に いち早く アクセス できます。
特別 割引 : 最新 製品 を 対象 に した 限定 割引 を 利用 できます。
イベント プロモーション と プレゼント : プレゼント 企画 や 祝日 キャンペーン に 参加 できます。
👉 私たち と 一緒 に 探索 と 創作 を 始める 準備 は できました か? [here] を クリック して、 今すぐ 参加 しましょう!
サーボ
概要
この プロジェクト では、 Raspberry Pi を 使用 して サーボ モーター を 制御 する 方法 を 学びます。 サーボ モーター は、 角度 の 動き を 高精度 に 制御 できる ため、 ロボティクス や 自動化 分野 で 広く 使用 されて います。
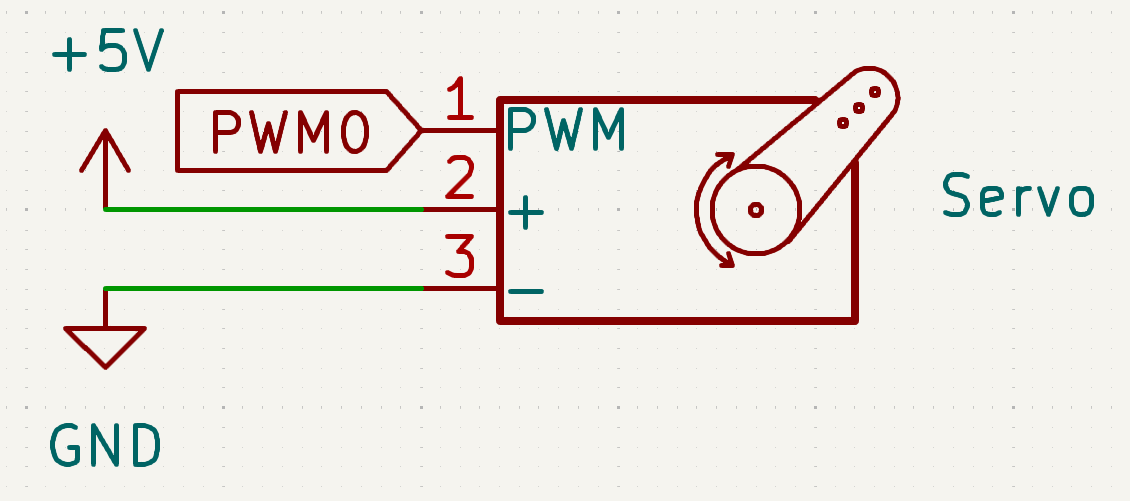
**回路図 **
以下 の 回路 図 は、 サーボ モーター を 制御 する ため に 必要 な 接続 を 示し てい ます。
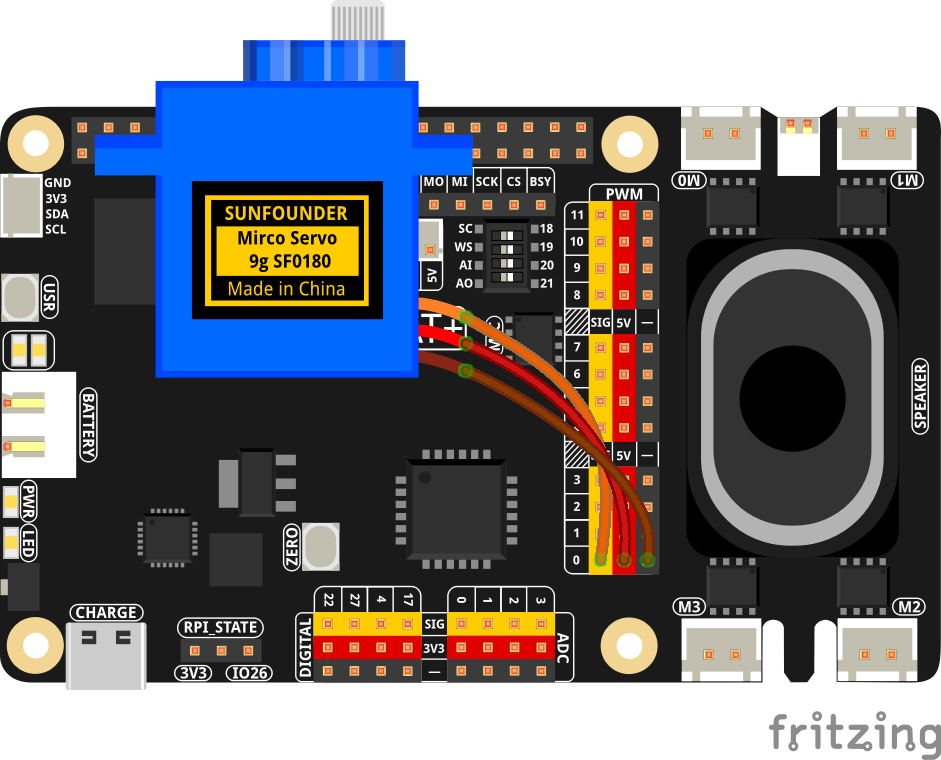
**配線図 **
コード
以下 の Python コード は、 サーボ モーター を さまざま な 角度 に 動かす こと で 制御 する 方法 を 示し ます:
from fusion_hat.servo import Servo # Import the Servo class for controlling servos
from time import sleep # Import sleep for timing delays
servo = Servo(0) # Create a Servo object on channel 0
while True: # Loop forever
# Sweep from -90° to +90° in steps of 10°
for i in range(-90, 91, 10):
servo.angle(i) # Set servo to angle i
sleep(0.1) # Small delay for smooth movement
# Sweep back from +90° to -90° in steps of -10°
for i in range(90, -91, -10):
servo.angle(i) # Set servo to angle i
sleep(0.1) # Small delay for smooth movement
この Python スクリプト は、 PWM 0 に 接続 された サーボ モーター を 制御 します。 実行 すると:
サーボ は -90 度 から 90 度 まで、 10 度 刻み で 移動 します。
各 動作 の 間 に 0.1 秒 の 停止 が 入り ます。
その後、 方向 を 反転 し、 90 度 から -90 度 まで、 10 度 刻み で 移動 します。
この 動作 は 無限 に 繰り返さ れます。