Note
Hello, welcome to the SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Community on Facebook! Dive deeper into Raspberry Pi, Arduino, and ESP32 with fellow enthusiasts.
Why Join?
Expert Support: Solve post-sale issues and technical challenges with help from our community and team.
Learn & Share: Exchange tips and tutorials to enhance your skills.
Exclusive Previews: Get early access to new product announcements and sneak peeks.
Special Discounts: Enjoy exclusive discounts on our newest products.
Festive Promotions and Giveaways: Take part in giveaways and holiday promotions.
👉 Ready to explore and create with us? Click [here] and join today!
6.1 Measuring Distance
The ultrasonic sensor module works on the principle of sonar and radar systems for determining the distance to an object.
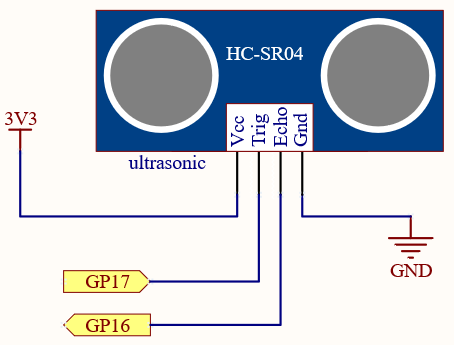
Schematic
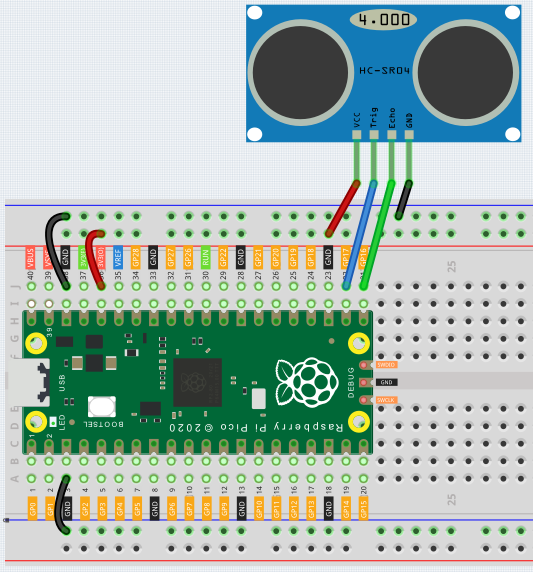
Wiring
Code
Note
Open the
6.1_measuring_distance.pyfile under the path ofeuler-kit/micropythonor copy this code into Thonny, then click “Run Current Script” or simply press F5 to run it.Don’t forget to click on the “MicroPython (Raspberry Pi Pico)” interpreter in the bottom right corner.
For detailed tutorials, please refer to Open and Run Code Directly.
import machine
import time
TRIG = machine.Pin(17,machine.Pin.OUT)
ECHO = machine.Pin(16,machine.Pin.IN)
def distance():
TRIG.low()
time.sleep_us(2)
TRIG.high()
time.sleep_us(10)
TRIG.low()
while not ECHO.value():
pass
time1 = time.ticks_us()
while ECHO.value():
pass
time2 = time.ticks_us()
during = time.ticks_diff(time2,time1)
return during * 340 / 2 / 10000
while True:
dis = distance()
print ('Distance: %.2f' % dis)
time.sleep_ms(300)
Once the program is running, the Shell will print out the distance of the ultrasonic sensor from the obstacle ahead.
How it works?
Ultrasonic sensors produce high frequency sound waves (ultrasonic waves) emitted by the transmitting probe. When this ultrasonic wave hits an object, it is reflected as an echo, which is detected by the receiving probe. By calculating the time from transmission to reception, the distance can be calculated.
Based on this principle, the function distance() can be derived.
def distance():
TRIG.low()
time.sleep_us(2)
TRIG.high()
time.sleep_us(10)
TRIG.low()
while not ECHO.value():
pass
time1 = time.ticks_us()
while ECHO.value():
pass
time2 = time.ticks_us()
during = time.ticks_diff(time2,time1)
return during * 340 / 2 / 10000
Among them, the first few lines are used to transmit a 10us ultrasonic wave.
TRIG.low()
time.sleep_us(2)
TRIG.high()
time.sleep_us(10)
TRIG.low()
Then, the program is paused and the current time is recorded when the ultrasonic wave has been emitted.
while not ECHO.value():
pass
time1 = time.ticks_us()
Subsequently, the program is suspended again. After the echo is received, the current time is recorded once again.
while ECHO.value():
pass
time2 = time.ticks_us()
Finally, based on the time difference between the two recordings, the speed of sound (340m/s) is multiplied by the time to obtain double the distance between the ultrasonic module and the obstacle (i.e., one round trip of the ultrasonic waves from the module to the obstacle). Converting the units to centimeters gives us the return value we need.
during = time.ticks_diff(time2,time1)
return during * 340 / 2 / 10000
Note that the ultrasonic sensor will pause the program when it is working, which may cause some lagging when writing complex projects.