Note
Hello, welcome to the SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Community on Facebook! Dive deeper into Raspberry Pi, Arduino, and ESP32 with fellow enthusiasts.
Why Join?
Expert Support: Solve post-sale issues and technical challenges with help from our community and team.
Learn & Share: Exchange tips and tutorials to enhance your skills.
Exclusive Previews: Get early access to new product announcements and sneak peeks.
Special Discounts: Enjoy exclusive discounts on our newest products.
Festive Promotions and Giveaways: Take part in giveaways and holiday promotions.
👉 Ready to explore and create with us? Click [here] and join today!
3.6 Pumping
Small centrifugal pumps are suitable for projects with automatic plant watering. It can also be used to make tiny smart water features.
Its power component is an electric motor, driven in exactly the same way as a normal motor.
Note
Connect the tube to the motor outlet, submerge the pump in water, and then power it on.
You need to make sure that the water level is always higher than the motor. Idling may damage the motor due to heat generation and will also generate noise.
If you are watering plants, you need to avoid soil being drawn in, as this can clog the pump.
If water does not come out of the tube, there may be residual water in the tube blocking the air flow and needs to be drained first.
Schematic
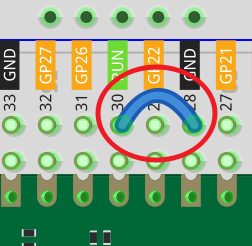
In this circuit, you will see that the button is connected to the RUN pin. This is because the motor is operating with too much current, which may cause the Pico to disconnect from the computer, and the button needs to be pressed (for the Pico’s RUN pin to receive a low level) to reset.
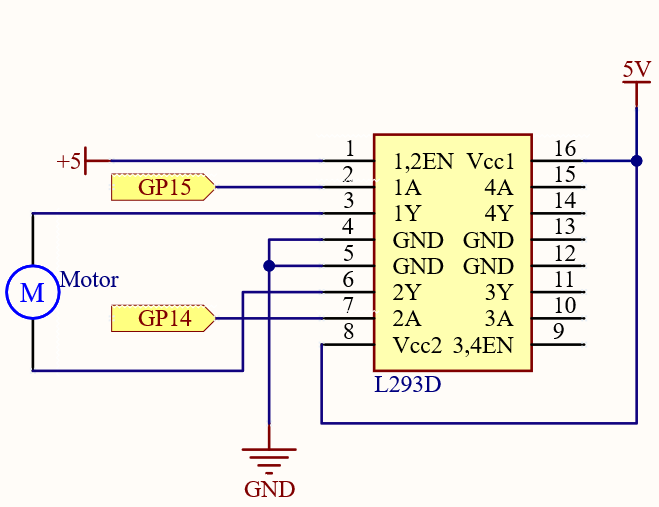
L293D is a motor driver chip, EN is connected to 5V to make L293D work. 1A and 2A are the inputs connected to GP15 and GP14 respectively; 1Y and 2Y are the outputs connected to the two ends of the motor.
Y (output) is in phase with A (input), so if GP15 and GP14 are given different levels respectively, the direction of motor rotation can be changed.
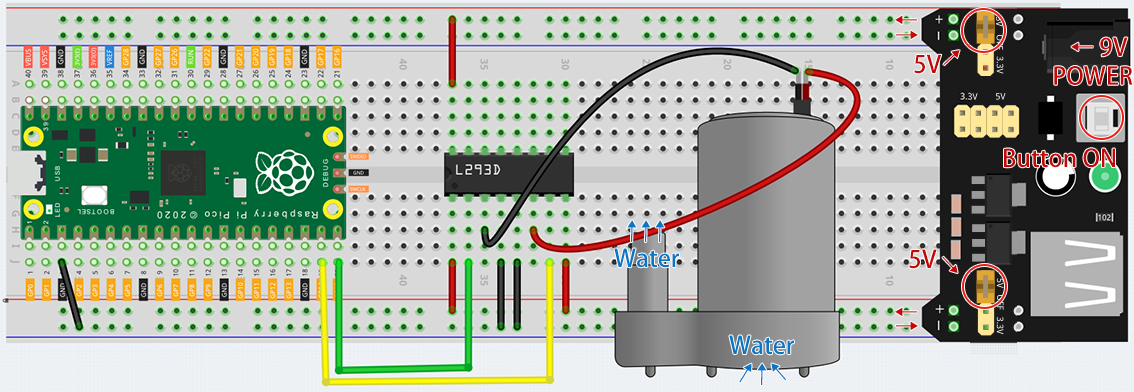
Wiring
Code
Note
Open the
3.6_pumping.pyfile under the path ofeuler-kit/micropythonor copy this code into Thonny, then click “Run Current Script” or simply press F5 to run it.Don’t forget to click on the “MicroPython (Raspberry Pi Pico)” interpreter in the bottom right corner.
For detailed tutorials, please refer to Open and Run Code Directly.
import machine
import utime
motor1A = machine.Pin(14, machine.Pin.OUT)
motor2A = machine.Pin(15, machine.Pin.OUT)
while True:
motor1A.high()
motor2A.low()
After the code is run, the pump starts working and you will see water flowing out of the tube at the same time.
Note
If the motor is still spinning after you click the Stop button, you need to reset the RUN pin on the Pico with a wire to GND at this time, and then unplug this wire to run the code again.
This is because the motor is operating with too much current, which may cause the Pico to disconnect from the computer.