Note
Hello, welcome to the SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Community on Facebook! Dive deeper into Raspberry Pi, Arduino, and ESP32 with fellow enthusiasts.
Why Join?
Expert Support: Solve post-sale issues and technical challenges with help from our community and team.
Learn & Share: Exchange tips and tutorials to enhance your skills.
Exclusive Previews: Get early access to new product announcements and sneak peeks.
Special Discounts: Enjoy exclusive discounts on our newest products.
Festive Promotions and Giveaways: Take part in giveaways and holiday promotions.
👉 Ready to explore and create with us? Click [here] and join today!
7.10 Reversing Aid
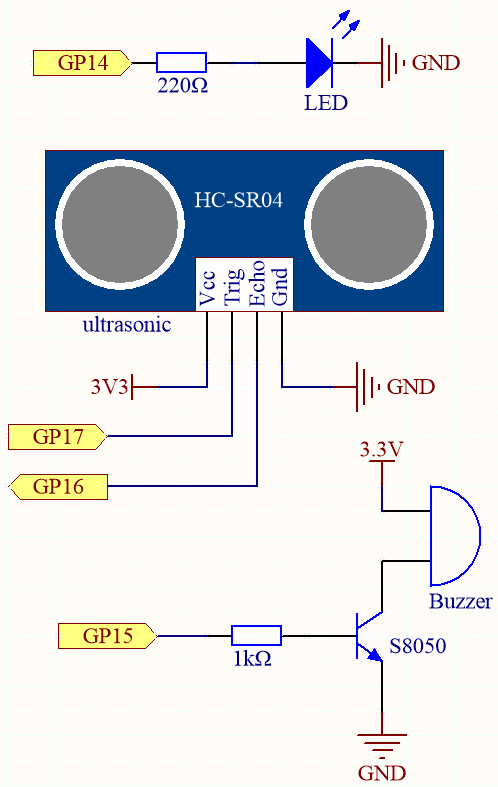
This project uses an LED, a buzzer and an ultrasonic module to create a reversing assist system. We can put it on a remote control car to simulate the the actual process of reversing a car into a garage.
Schematic
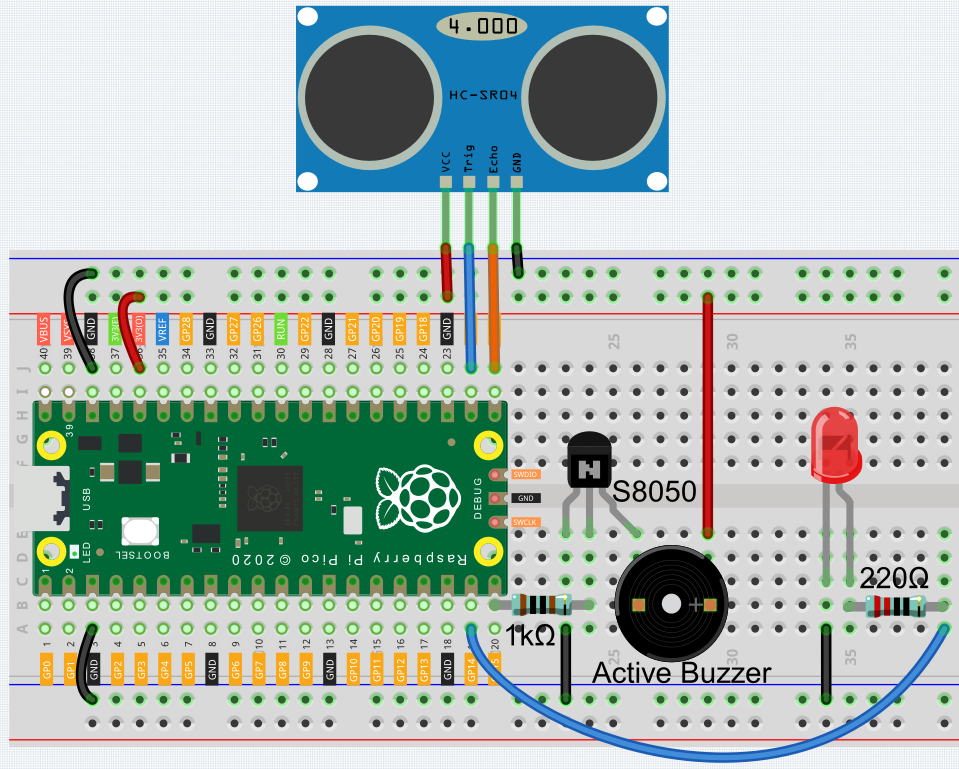
Wiring
Code
Note
Open the
7.10_reversing_aid.pyfile under the path ofeuler-kit/micropythonor copy this code into Thonny, then click “Run Current Script” or simply press F5 to run it.Don’t forget to click on the “MicroPython (Raspberry Pi Pico)” interpreter in the bottom right corner.
For detailed tutorials, please refer to Open and Run Code Directly.
import machine
import time
import _thread
buzzer = machine.Pin(15, machine.Pin.OUT)
led = machine.Pin(14, machine.Pin.OUT)
TRIG = machine.Pin(17,machine.Pin.OUT)
ECHO = machine.Pin(16,machine.Pin.IN)
dis = 100
def distance():
timeout=10000*5/340
TRIG.low()
time.sleep_us(2)
TRIG.high()
time.sleep_us(10)
TRIG.low()
timeout_start = time.ticks_ms() # For timeout, re-read distance
while not ECHO.value():
waiting_time = time.ticks_ms()
if waiting_time - timeout_start > timeout:
return -1
time1 = time.ticks_us()
while ECHO.value():
waiting_time = time.ticks_ms()
if waiting_time - timeout_start > timeout:
return -1
time2 = time.ticks_us()
during = time.ticks_diff(time2 ,time1)
return during * 340 / 2 / 10000
def ultrasonic_thread():
global dis
while True:
dis = distance()
_thread.start_new_thread(ultrasonic_thread, ())
def beep():
buzzer.value(1)
led.value(1)
time.sleep(0.1)
buzzer.value(0)
led.value(0)
time.sleep(0.1)
intervals = 10000000
previousMills=time.ticks_ms()
time.sleep(1)
while True:
if dis<0:
pass
elif dis <= 10:
intervals = 300
elif dis <= 20:
intervals =500
elif dis <=50:
intervals =1000
else:
intervals = 2000
if dis!=-1:
print ('Distance: %.2f' % dis)
time.sleep_ms(100)
currentMills=time.ticks_ms()
if time.ticks_diff(currentMills,previousMills)>=intervals:
beep()
previousMills=currentMills
As soon as the program runs, the ultrasonic sensor will continuously read the distance to the obstacle in front of you, and you will be able to see the exact distance value on the shell.
The LED and buzzer will change the frequency of blinking and beeping depending on the distance value, thus indicating the approach of the obstacle.
The 6.1 Measuring Distance article mentioned that when the ultrasonic sensor works, the program will be paused.
To avoid interfering with the LED or buzzer timing, we created a separate thread for ranging in this example.