Note
Bonjour, bienvenue dans la communauté SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts sur Facebook ! Plongez au cœur de Raspberry Pi, Arduino et ESP32 avec d’autres passionnés.
Pourquoi nous rejoindre ?
Support d’experts : Résolvez les problèmes après-vente et les défis techniques grâce à l’aide de notre communauté et de notre équipe.
Apprendre & Partager : Échangez des astuces et des tutoriels pour améliorer vos compétences.
Aperçus exclusifs : Accédez en avant-première aux annonces de nouveaux produits et aux avant-goûts.
Réductions spéciales : Profitez de réductions exclusives sur nos nouveaux produits.
Promotions festives et tirages au sort : Participez à des tirages au sort et des promotions de vacances.
👉 Prêt à explorer et créer avec nous ? Cliquez sur [Ici] et rejoignez-nous dès aujourd’hui !
QMC5883L
Vue d’ensemble
Dans ce tutoriel, nous allons explorer le module IMU GY-87, en nous concentrant sur son magnétomètre QMC5883L. La première partie du tutoriel vous guide à travers la calibration du magnétomètre QMC5883L, essentielle pour des mesures précises du champ magnétique. Vous apprendrez à téléverser un sketch de calibration sur Arduino, à effectuer une calibration en temps réel et à appliquer ces paramètres dans vos projets. La deuxième partie du tutoriel couvre l’initialisation du MPU6050 (accéléromètre et gyroscope) et du QMC5883L sur un Arduino Uno en utilisant les bibliothèques Adafruit MPU6050 et QMC5883LCompass. Vous apprendrez à lire et afficher les données des capteurs sur le moniteur série, une compétence fondamentale pour les applications de navigation, de suivi de mouvement et de détection d’orientation.
Composants requis
Pour ce projet, nous avons besoin des composants suivants.
Il est certainement pratique d’acheter un kit complet, voici le lien :
Nom |
ARTICLES DANS CE KIT |
LIEN |
|---|---|---|
Elite Explorer Kit |
300+ |
Vous pouvez également les acheter séparément à partir des liens ci-dessous.
INTRODUCTION DES COMPOSANTS |
LIEN D’ACHAT |
|---|---|
- |
|
- |
Câblage

Schéma de câblage

Installer la bibliothèque
Note
Pour installer la bibliothèque, utilisez le gestionnaire de bibliothèques Arduino.
Recherchez « Adafruit MPU6050 » et installez
Lors de l’installation de chaque bibliothèque, veuillez vous assurer de sélectionner l’installation de toutes les dépendances.

Recherchez « QMC5883LCompass » et installez
Calibrer le QMC5883L
Note
Vous pouvez ouvrir le fichier
09-gy87_compass_calibration.inosous le cheminelite-explorer-kit-main\basic_project\09-gy87_compass_calibrationdirectement.Ou copiez ce code dans l’IDE Arduino.
Après avoir téléversé le code, ouvrez le moniteur série. Suivez les instructions dans le moniteur série pour calibrer le QMC5883L. Lorsqu’il vous est demandé de déplacer le capteur, il est recommandé d’utiliser la méthode de calibration en huit. Alternativement, gardez simplement le capteur parallèle au sol et tournez-le dans le sens horaire ou antihoraire jusqu’à ce que le moniteur série indique que la calibration est terminée.
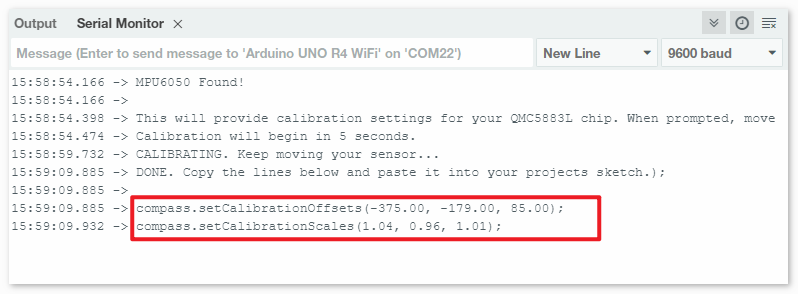
Une fois que toutes les données de calibration ont été collectées, le sketch vous fournira un code qui ressemblera à compass.setCalibrationOffsets(-375.00, -179.00, 85.00); et compass.setCalibrationScales(1.04, 0.96, 1.01);. Copiez ce code. Vous voudrez peut-être le sauvegarder pour référence future.
Utilisation du QMC5883L : Ouvrez le sketch de votre projet et collez la ligne de code que vous avez copiée juste en dessous de l’appel compass.init(). Comme ceci :
void initializeQMC5883L() {
compass.init();
// Vous devriez remplacer le code ci-dessous selon vos résultats de calibration
compass.setCalibrationOffsets(-375.00, -179.00, 85.00);
compass.setCalibrationScales(1.04, 0.96, 1.01);
}
Code
Note
Les magnétomètres doivent être calibrés (Calibrer le QMC5883L) avant de pouvoir être utilisés comme compas, et doivent être tenus à niveau lors de l’utilisation et éloignés des objets en fer, des matériaux magnétisés et des fils porteurs de courant.
Note
Vous pouvez ouvrir le fichier
09-gy87_qmc5883l.inosous le cheminelite-explorer-kit-main\basic_project\09-gy87_qmc5883ldirectement.Ou copiez ce code dans l’IDE Arduino.
Placez le code obtenu à partir des étapes de calibration sous la ligne de code
compass.init()dans la fonctioninitializeQMC5883L().
Analyse du code
Inclusion des bibliothèques et initialisation des capteurs Cette section inclut les bibliothèques nécessaires pour les capteurs MPU6050 et QMC5883L et initialise leurs objets.
#include <Adafruit_MPU6050.h> #include <Adafruit_Sensor.h> #include <Wire.h> #include <QMC5883LCompass.h> Adafruit_MPU6050 mpu; QMC5883LCompass compass;
Fonction de configuration
Initialise la communication série, le capteur MPU6050, et configure le MPU6050 en mode bypass I2C pour permettre l’accès direct au magnétomètre QMC5883L. Ensuite, il initialise le magnétomètre QMC5883L.
void setup() { // Initialise la communication série avec un débit de 9600 bauds Serial.begin(9600); // Initialise le capteur MPU6050 (accéléromètre et gyroscope) initializeMPU6050(); // Active le bypass I2C sur le MPU6050 pour accéder directement au magnétomètre QMC5883L mpu.setI2CBypass(true); // Initialise le magnétomètre QMC5883L initializeQMC5883L(); }
Fonction boucle
Lit continuellement les données du magnétomètre QMC5883L et les affiche sur le moniteur série.
void loop() { printQMC5883L(); delay(500); }
Fonction d’initialisation du QMC5883L
Initialise et calibre le magnétomètre QMC5883L. Les valeurs de calibration doivent être ajustées en fonction des données de calibration spécifiques. (Calibrer le QMC5883L)
void initializeQMC5883L() { compass.init(); // Vous devriez remplacer le code ci-dessous selon vos résultats de calibration compass.setCalibrationOffsets(-549.00, -66.00, 160.00); compass.setCalibrationScales(0.97, 1.02, 1.02); }
Fonction d’impression des données du QMC5883L
Cette fonction lit les valeurs X, Y, Z et l’azimut du magnétomètre, puis les affiche sur le moniteur série.
void printQMC5883L() { Serial.println(); Serial.println("QMC5883L ------------"); int x, y, z, a; char myArray[3]; compass.read(); x = compass.getX(); y = compass.getY(); z = compass.getZ(); a = compass.getAzimuth(); compass.getDirection(myArray, a); Serial.print("X: "); Serial.print(x); Serial.print(" Y: "); Serial.print(y); Serial.print(" Z: "); Serial.print(z); Serial.print(" Azimuth: "); Serial.print(a); Serial.print(" Direction: "); Serial.print(myArray[0]); Serial.print(myArray[1]); Serial.println(myArray[2]); Serial.println("QMC5883L ------------"); Serial.println(); }